Расчет движения транспортного средства с использованием кинематической модели одноколесного двигателя
Инструментарий робототехнической системы/Алгоритмы мобильных роботов
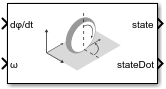
Блок кинематической модели Unicycle создает модель одноколесного транспортного средства для моделирования упрощенной автомобильной динамики транспортного средства. Эта модель аппроксимирует транспортное средство как одноколесное с заданным радиусом колеса, Wheel radius, которые могут вращаться на месте в соответствии с угловой скоростью рулевого управления, ω.
[1] Линч, Кевин М. и Фрэнк К. Парк. Современная робототехника: механика, планирование и управление 1-й ред. Кембридж, Массачусетс: Cambridge University Press, 2017.

