Интеграция входного сигнала второго порядка
Симуляция/непрерывная
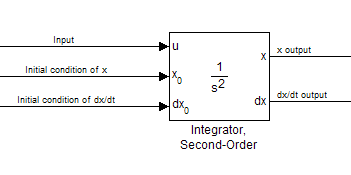
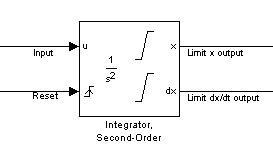
Блок Integrator второго порядка и блок Integrator Limited второго порядка решают задачу начального значения второго порядка:
x' t = 0 = xo,
где u - вход в систему. Поэтому блок является динамической системой с двумя непрерывными состояниями: x и dx/dt.
Примечание
Эти два состояния имеют математическое отношение, а именно, что dx/dt является производной x. Чтобы удовлетворить это отношение на протяжении моделирования, Simulink накладывает различные ограничения на параметры блока и поведение.
Блок Integrator Limited второго порядка идентичен блоку Integrator второго порядка, за исключением того, что он по умолчанию ограничивает состояния на основе указанных верхнего и нижнего пределов. Дополнительные сведения см. в разделе Ограничение состояний.
Программное обеспечение Simulink ® может использовать несколько различных методов числовой интеграции для вычисления выходных сигналов блока. Каждый из них имеет преимущества для конкретных применений. Используйте панель Решатель (Solver) диалогового окна Параметры конфигурации (Configuration Parameters), чтобы выбрать метод, наиболее подходящий для приложения. (Дополнительные сведения см. в разделе Критерии выбора решателя.) Выбранный решатель вычисляет состояния блока интегратора второго порядка на текущем шаге времени, используя текущее входное значение .
Диалоговое окно параметров блока используется для:
Укажите, является ли источник каждого исходного состояния внутренним или внешним
Укажите значение для начальных условий состояния
Определение верхнего и нижнего пределов для одного или обоих состояний
Задание абсолютных допусков для каждого состояния
Укажите имена для обоих состояний
Выбор внешнего условия сброса
Включить обнаружение пересечения нулей
Повторная инициализация dx/dt, когда x достигает насыщения
Укажите, что Simulink игнорирует пределы состояния и внешний сброс для операций линеаризации
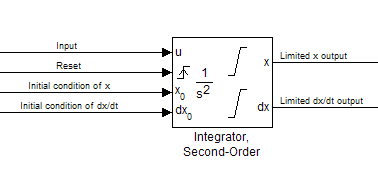
Начальные условия каждого состояния можно определить отдельно как параметр в диалоговом окне блока или ввести один или оба из них из внешнего сигнала.
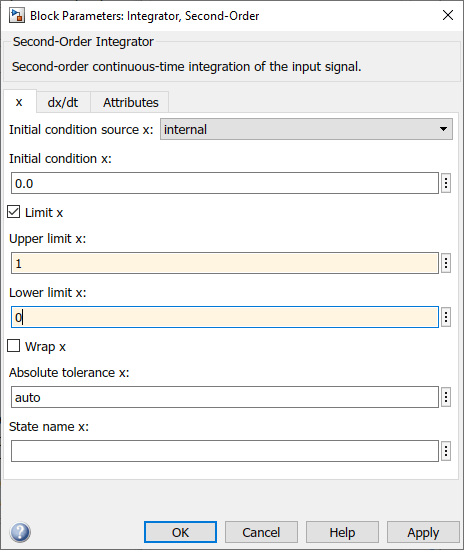
Чтобы определить начальные условия состояния x как параметр блока, используйте раскрывающееся меню Исходный источник условия x для выбора internal и введите значение в поле Начальное условие x.
Для предоставления исходных условий из внешнего источника для состояния x укажите параметр Initial condition source x как external. На блоке появится дополнительный входной порт.
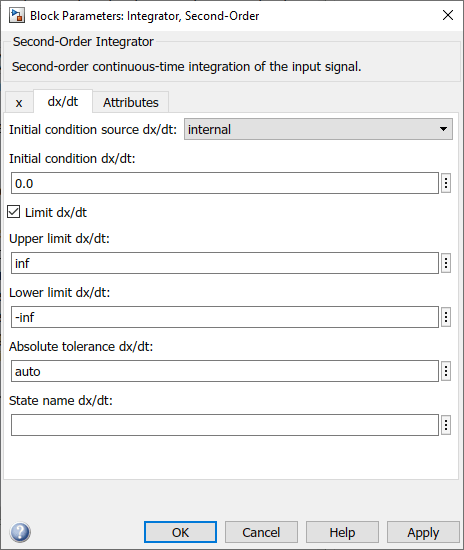
Чтобы определить начальные условия состояния dx/dt в качестве параметра блока, используйте раскрывающееся меню Initial condition source dx/dt для выбора internal и введите значение в поле Начальное условие dx/dt.
Для предоставления исходных условий из внешнего источника для состояния dx/dt укажите Исходный источник условий dx/dt как external. На блоке появится дополнительный входной порт.
При выборе внешнего источника для обоих начальных условий состояния блок отображается следующим образом.
Примечание
Simulink не допускает значения начальных условий inf или NaN.
Если ограничить состояние x или состояние dx/dt, указав пределы насыщения (см. Ограничение состояний), и одно или несколько начальных условий выходят за соответствующие пределы, то соответствующие состояния инициализируются до ближайшего допустимого значения и вычисляется набор согласованных начальных условий.
При моделировании системы второго порядка может потребоваться ограничить состояния блоков. Например, движение поршня внутри цилиндра регулируется вторым законом Ньютона и имеет ограничения на положение поршня (x). С помощью блока интегратора второго порядка можно ограничить независимые друг от друга состояния x и dx/dt. Можно даже изменить пределы во время моделирования; однако нельзя изменить, ограничены ли эти состояния. Важное правило, которому следует следовать, заключается в том, что верхний предел должен быть строго больше соответствующего нижнего предела.
Внешний вид блока изменяется при ограничении одного или обоих состояний. Если оба состояния ограничены, блок выглядит следующим образом.
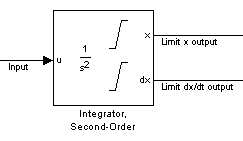
Для каждого состояния можно использовать диалоговое окно параметров блока для установки соответствующих пределов насыщения.
При использовании блока Integrator Limited второго порядка оба состояния ограничены по умолчанию. Но можно также вручную ограничить состояние x в блоке интегратора второго порядка, выбрав параметр Limit x и введя пределы в соответствующие поля параметров.
Затем блок определяет значения состояний следующим образом:
Когда x меньше или равно его нижней границе, значение x удерживается на его нижней границе, и dx/dt устанавливается равным нулю.
Когда x находится между его нижним и верхним пределами, оба состояния следуют траектории, заданной ОДУ второго порядка.
Когда значение x больше или равно его верхнему пределу, значение x удерживается на его верхнем пределе, а значение dx/dt устанавливается равным нулю.
Можно выбрать повторную инициализацию dx/dt до нового значения в момент, когда x достигает насыщения. См. раздел Повторная инициализация dx/dt, когда x достигает насыщения.
Как и в случае состояния x, состояние dx/dt устанавливается как ограниченное по умолчанию на панели dx/dt диалогового окна блока Integrator Limited второго порядка. Этот параметр, Limit dx/dt, можно задать вручную в блоке интегратора второго порядка. В любом случае необходимо ввести соответствующие пределы для dx/dt.
Если ограничить только состояние dx/dt, то блок определяет значения dx/dt следующим образом:
Когда dx/dt меньше или равно его нижнему пределу, значение dx/dt удерживается на его нижнем пределе.
Когда dx/dt находится между его нижним и верхним пределами, оба состояния следуют траектории, заданной ОДУ второго порядка.
Когда dx/dt больше или равно его верхнему пределу, значение dx/dt удерживается на его верхнем пределе.
Когда состояние dx/dt удерживается на верхнем или нижнем пределе, значение x определяется проблемой начального значения первого порядка:
= xL,
где L - предел dx/dt (верхний или нижний), tL - время, когда dx/dt достигает этого предела, и xL - значение состояния x в это время.
При ограничении обоих состояний Simulink поддерживает математическую согласованность состояний, ограничивая допустимые значения верхнего и нижнего пределов для dx/dt. Такие ограничения необходимы для выполнения следующих ограничений:
Если значение x равно пределу насыщения, значение dx/dt должно быть равно нулю.
Для выхода x за верхний предел значение dx/dt должно быть строго отрицательным.
Для того, чтобы x вышел за нижний предел, значение dx/dt должно быть строго положительным.
Для таких случаев верхний предел dx/dt должен быть строго положительным, а нижний предел dx/dt должен быть строго отрицательным.
Когда оба состояния ограничены, блок определяет состояния следующим образом:
Когда x достигает своих пределов, результирующее поведение будет таким же, как описано в разделе «Ограничение только x».
Всякий раз, когда dx/dt достигает одного из своих пределов, результирующее поведение является таким же, как описано в «Limiting dx/dt only» - включая вычисление x с использованием ОДУ первого порядка, когда dx/dt удерживается на одном из его пределов. В таких случаях, когда x достигает одного из своих пределов, он удерживается на этом пределе и dx/dt устанавливается равным нулю.
Всякий раз, когда оба достигают своих соответствующих пределов одновременно, поведение состояния x переопределяет поведение dx/dt для поддержания согласованности состояний.
При ограничении обоих состояний можно выбрать повторную инициализацию dx/dt в момент, когда состояние x достигает насыщения. Если повторно инициализированное значение выходит за указанные пределы для dx/dt, то dx/dt повторно инициализируется до ближайшего допустимого значения и вычисляется согласованный набор начальных условий. См. раздел Повторная инициализация dx/dt при достижении x уровня насыщения
Блок может сбросить свои состояния до заданных начальных условий на основе внешнего сигнала. Чтобы вызвать сброс состояния блока, выберите один из вариантов внешнего сброса на панели Атрибуты (Attributes). Порт триггера появляется в блоке под входным портом и указывает тип триггера.
Выбрать rising сброс состояний при увеличении сигнала сброса от нуля до положительного значения, от отрицательного до положительного значения или от отрицательного значения до нуля.
Выбрать falling сброс состояний при падении сигнала сброса с положительного на ноль, с положительного на отрицательное или с нуля на отрицательное.
Выбрать either сброс состояний при изменении сигнала сброса с нуля на ненулевое значение или изменение знака.
Порт сброса имеет прямой канал. Если выходные данные блока поступают обратно в этот порт либо непосредственно, либо через ряд блоков с прямым проходом, получается алгебраический цикл (см. Алгебраические концепции цикла).
Этот параметр определяет, включено ли обнаружение пересечения нулей для этого блока. По умолчанию на панели Атрибуты (Attributes) выбран параметр Включить обнаружение пересечения нуля (Enable zero-crossing detection). Однако этот параметр влияет только в том случае, если для элемента управления пересЕчение нуля (Zero-crossing) на панели Решатель (Solver) диалогового окна Параметры конфигурации (Configuration Parameters) установлено значение Use local settings. Дополнительные сведения см. в разделе Обнаружение пересечения нулей.
Для некоторых приложений моделирования dx/dt необходимо повторно инициализировать, когда состояние x достигает своих пределов, чтобы немедленно вывести x из насыщения. Для этого на панели Атрибуты (Attributes) выберите пункт Повторно инициализировать dx/dt, когда x достигает насыщения.
Если эта опция включена, то в момент, когда x достигает насыщения, Simulink проверяет, позволяет ли текущее значение начального условия dx/dt (параметр или сигнал) немедленно покинуть состояние x. Если это так, Simulink повторно инициализирует состояние dx/dt со значением начального условия (параметра или сигнала) в этот момент. Если нет, Simulink игнорирует этот параметр в текущий момент и устанавливает значение dx/dt равным нулю, чтобы состояния блока были согласованы.
Этот параметр применяется только в момент, когда x фактически достигает предела насыщения. Он не применяется в будущем, когда x удерживается при насыщении.
Дополнительные сведения см. в разделах, посвященных ограничению состояний. Пример см. в разделе Моделирование подпрыгивающего шара.
В тех случаях, когда упрощается модель путем линеаризации, Simulink может игнорировать пределы состояний и внешний сброс, выбрав Игнорировать пределы состояний и сброс для линеаризации.
По умолчанию программа Simulink использует абсолютное значение допуска, указанное в диалоговом окне Параметры конфигурации (Configuration Parameters) (см. раздел Допуски ошибок для решателей с переменным шагом) для вычисления выходных данных блоков интегратора. Если это значение не обеспечивает достаточного контроля ошибок, укажите более подходящее значение для состояния x в поле Абсолютный допуск x и для состояния dx/dt в поле Абсолютный допуск dx/dt диалогового окна параметра. Simulink использует указанные значения для вычисления значений состояния блока.
Можно управлять отображением выходного порта x или dx/dt с помощью ShowOutput параметр. Можно отобразить один выходной порт или оба порта; однако необходимо выбрать хотя бы один.
Можно указать имена состояний x и dx/dt с помощью StateNameX и StateNameDXDT параметры. Однако необходимо указать имена для обоих или ни для одного из них; нельзя указывать имена только для x или только для dx/dt. Оба имени состояний должны иметь одинаковый тип и длину. Кроме того, число имен должно равномерно делить число состояний.
При выборе всех параметров значок блока выглядит следующим образом.
Типы данных |
|
Прямой проход |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
Обнаружение пересечения нулей |
|

