Задержка ввода по переменному количеству времени
Симуляция/непрерывная
Блоки «Переменная задержка передачи» и «Переменная задержка времени» отображаются в библиотеке блоков Simulink ® в виде двух блоков. Однако они представляют собой один и тот же блок Simulink с различными настройками для параметра «Выбор типа задержки». Этот параметр используется для указания режима работы блока.
В этом режиме блочный выход на текущем временном шаге равен значению его данных (верхнего или левого), введенных на более раннем временном шаге, равном текущему времени минус задержка передачи.
td (t))
Программное обеспечение Simulink находит задержку передачи ), решая следующее уравнение:
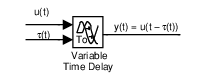
Это уравнение включает в себя мгновенную временную задержку ), заданную входным сигналом временной задержки (нижний или правый).
![]()
Предположим, что вы хотите использовать этот блок для моделирования потока жидкости через трубу, где скорость жидкости изменяется со временем. В этом случае временная задержка, введенная в блок, равна
(t)
где L - длина трубы, а ) - скорость текучей среды.
В этом режиме блок имеет вход данных, вход временной задержки и выход данных. (Описание порядка портов для различных ориентаций блоков см. в разделе Расположение порта после поворота или разворота.) Выходной сигнал на текущем шаге времени равен значению его ввода данных на предыдущем шаге времени. Этот временной шаг представляет собой текущее время моделирования минус время задержки, заданное вводом временной задержки.
(t − start( t))
Во время моделирования блок сохраняет пары времени и входных значений во внутреннем буфере. В начале моделирования блок выводит значение параметра Initial output до тех пор, пока время моделирования не превысит введенное время задержки. Затем на каждом этапе моделирования блок выводит сигнал в момент времени, который соответствует текущему времени моделирования минус время задержки.
Если необходимо, чтобы выходные данные находились в промежутке между временами хранения входных данных, а решатель был непрерывным решателем, блок выполняет линейную интерполяцию между точками. Если временная задержка меньше размера шага, блок экстраполирует выходную точку из предыдущей точки. Например, рассмотрим моделирование с фиксированным шагом с размером шага 1 и текущее время в t = 5. Если задержка 0.5, блок должен генерировать точку в t = 4.5, но самое последнее сохраненное значение времени находится в t = 4. Таким образом, блок экстраполирует входной сигнал на 4.5 от входа в 4 и использует экстраполированное значение в качестве выходного значения при t = 5.
Экстраполяция вперед от предыдущего временного шага может дать менее точный результат, чем экстраполяция назад от текущего временного шага. Однако блок не может использовать текущий вход для вычисления своего выходного значения, поскольку входной порт не имеет прямого канала.
Если модель задает дискретный решатель, блок не интерполируется между временными шагами. Вместо этого возвращается ближайшее сохраненное значение, которое предшествует требуемому значению.
Типы данных |
|
Прямой проход |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
Обнаружение пересечения нулей |
|

