В этом примере показано, как спроектировать компенсатор для модели Simulink ® с помощью автоматизированной настройки PID в приложении Control System Designer. Затем показано, как точно настроить конструкцию компенсатора с помощью редактора Bode с разомкнутым контуром.
В этом примере используется watertank_comp_design Модель Simulink. Для открытия модели в командной строке MATLAB ® введите:
watertank_comp_design
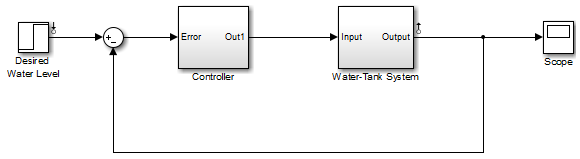
Эта модель содержит модель установки системы резервуаров для воды и ПИД-контроллер в одноконтурной системе обратной связи.
Для просмотра модели резервуара для воды откройте подсистему системы резервуаров для воды.
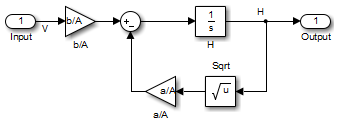
Данная модель представляет собой следующую систему резервуаров для воды.
Здесь:
H - высота воды в резервуаре.
Vol - объём воды в баке.
V - напряжение, приложенное к насосу.
А - площадь поперечного сечения резервуара.
b - постоянная, связанная с расходом в резервуар.
а - постоянная, связанная с расходом из резервуара.
Вода поступает в бак сверху со скоростью, пропорциональной напряжению, приложенному к насосу. Вода выходит через отверстие в основании резервуара со скоростью, пропорциональной квадратному корню высоты воды в резервуаре. Наличие квадратного корня в расходе воды приводит к нелинейной установке. На основании этих расходов скорость изменения объема резервуара составляет:
bV − aH
Настройте PID-контроллер в соответствии со следующими требованиями к конструкции ступенчатого ответа с замкнутым контуром:
Перерасход менее 5%
Время нарастания менее пяти секунд
Чтобы открыть конструктор систем управления, в окне модели Simulink в галерее Apps щелкните Конструктор систем управления.
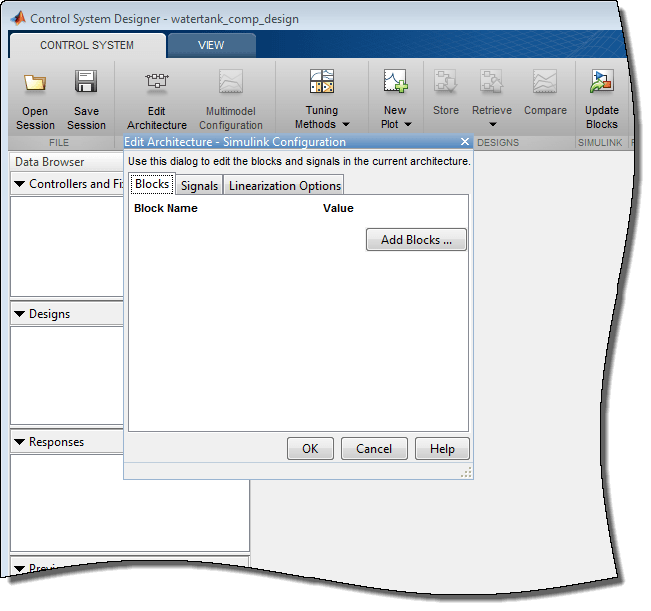
Конструктор систем управления (Control System Designer) открывает и автоматически открывает диалоговое окно Править архитектуру (Edit Architecture).
Чтобы задать настраиваемый компенсатор, в диалоговом окне «Редактирование архитектуры» нажмите кнопку «Добавить блоки».
В диалоговом окне «Выбор блоков для настройки» на левой панели выберите подсистему контроллера. В столбце «Настройка» установите флажок для контроллера PID.
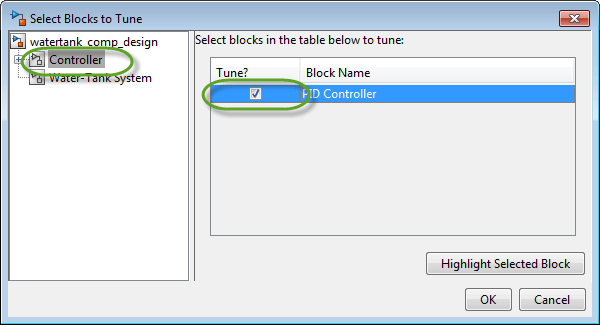
Нажмите кнопку ОК.
В диалоговом окне Изменить архитектуру приложение добавляет выбранный блок контроллера в список блоков для настройки на вкладке Блоки. На вкладке Signals приложение также добавляет выходные данные блока PID Controller в список точек анализа Locations.
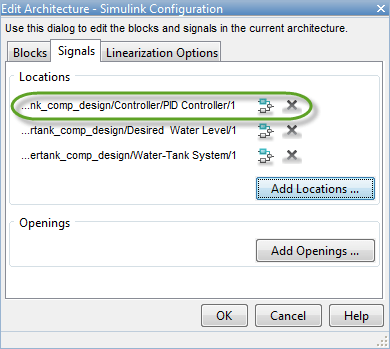
При открытии конструктора систем управления в список Расположения (Locations) добавляются все точки анализа, ранее определенные в модели Simulink. Для watertank_comp_design, есть два таких сигнала.
Выход блока требуемого уровня воды - опорный сигнал для ступенчатой реакции с замкнутым контуром
Выход блока системы водоемов - выходной сигнал для ступенчатой реакции замкнутого контура
Для линеаризации модели Simulink и установки архитектуры управления нажмите кнопку «ОК».
По умолчанию конструктор систем управления линеаризует модель завода в начальных условиях модели.
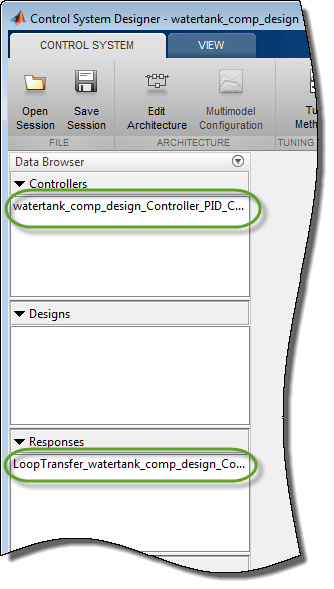
Приложение добавляет контроллер PID в браузер данных в разделе Контроллеры и фиксированные блоки. Приложение также вычисляет функцию передачи с разомкнутым контуром на выходе блока PID Controller и добавляет этот ответ в браузер данных.
Для анализа конструкции контроллера создайте замкнутую передаточную функцию системы и постройте график ее ступенчатой реакции.
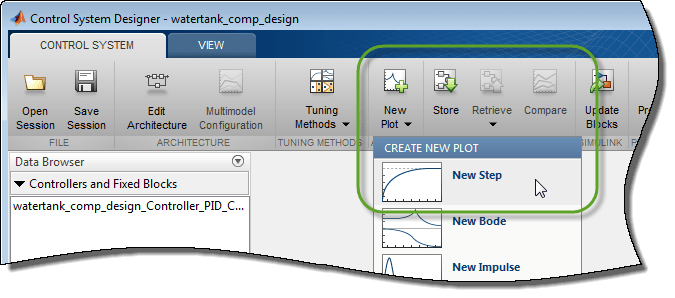
На вкладке «Система управления» нажмите «Новый график» и выберите New Step.
В диалоговом окне «Новый шаг для печати» в раскрывающемся списке «Выбор ответа на печать» выберите New Input-Output Transfer Response.
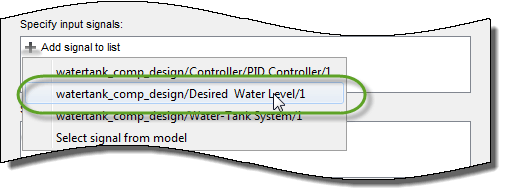
Чтобы добавить входной сигнал, в области Задать входные сигналы (Specify input signals) щелкните +. В раскрывающемся списке выберите выход блока «Требуемый уровень воды».
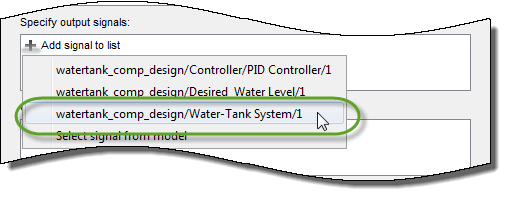
Чтобы добавить выходной сигнал, в области Задать выходные сигналы (Specify output signals) щелкните +. В раскрывающемся списке выберите выход блока «Система резервуаров для воды».
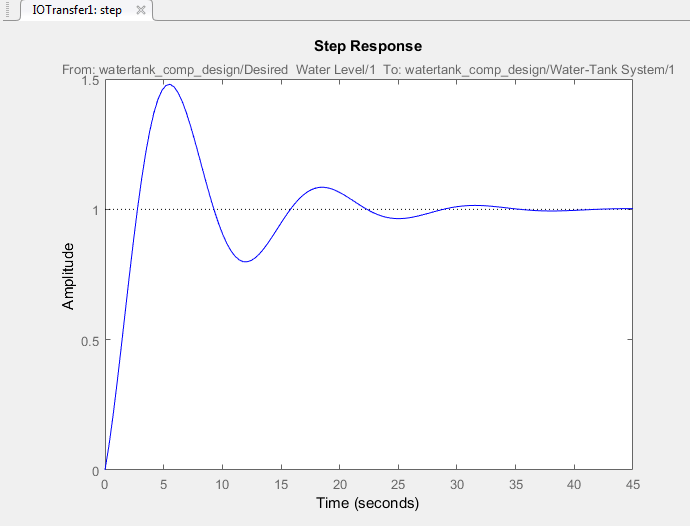
Чтобы создать функцию переноса с замкнутым контуром и построить график ответа на шаг, щелкните График (Plot).
Чтобы просмотреть максимальное превышение на графике ответа, щелкните правой кнопкой мыши область графика и выберите «Характеристики» > «Пиковый ответ».
Чтобы просмотреть время подъема на графике ответа, щелкните правой кнопкой мыши область графика и выберите «Характеристики» > «Время подъема».
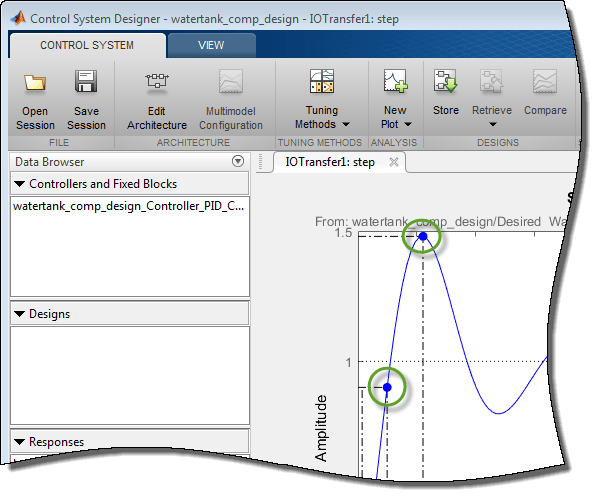
Наведите курсор на индикаторы признаков для просмотра их значений. Текущая конструкция имеет:
Максимальное превышение - 47,9%.
Время подъема 2,13 секунды.
Этот ответ не удовлетворяет требованиям к 5% избыточной конструкции.
Чтобы настроить компенсатор с помощью автоматической настройки PID, нажмите Tuning Methods и выберите PID Tuning.
В диалоговом окне «Настройка PID» в разделе «Спецификации» выберите следующие опции:
Метод настройки - Robust response time
Тип контроллера - PI
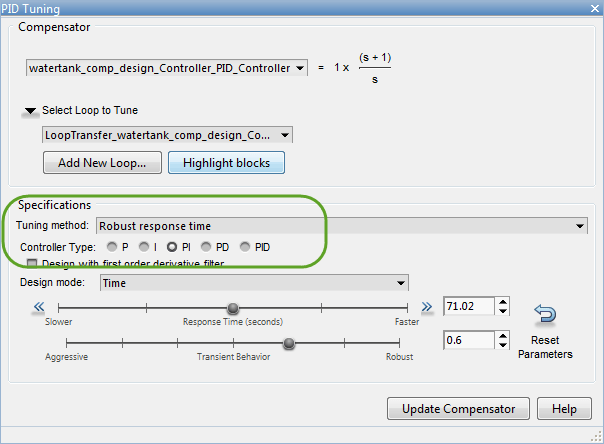
Щелкните Обновить компенсатор (Update Compensator). Приложение обновляет отклик с замкнутым циклом для новых настроек компенсатора и обновляет график ответа шага.
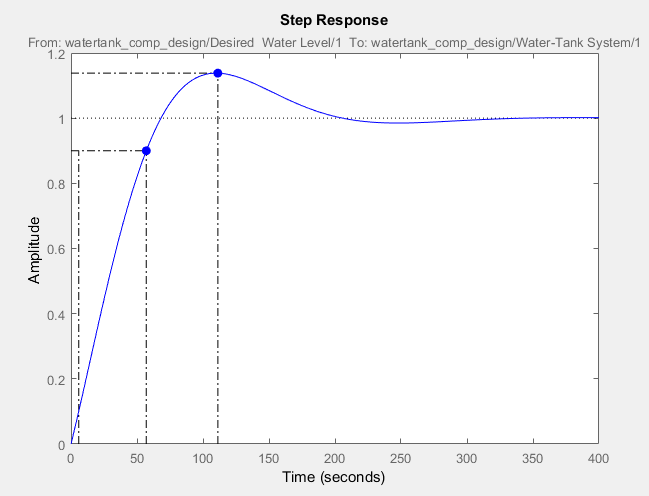
Для проверки производительности системы наведите указатель мыши на маркеры характеристик отклика. Отклик системы с настроенным компенсатором имеет:
Максимальное превышение - 13,8%.
Время подъема 51,2 секунды.
Этот ответ превышает максимально допустимое превышение в 5%. Время подъема намного медленнее, чем требуемое время подъема в пять секунд.
Чтобы уменьшить время нарастания, интерактивно увеличьте коэффициент усиления компенсатора, используя графический Bode Tuning.
Чтобы открыть редактор модов с разомкнутым контуром, щелкните «Методы настройки» и выберите Bode Editor.
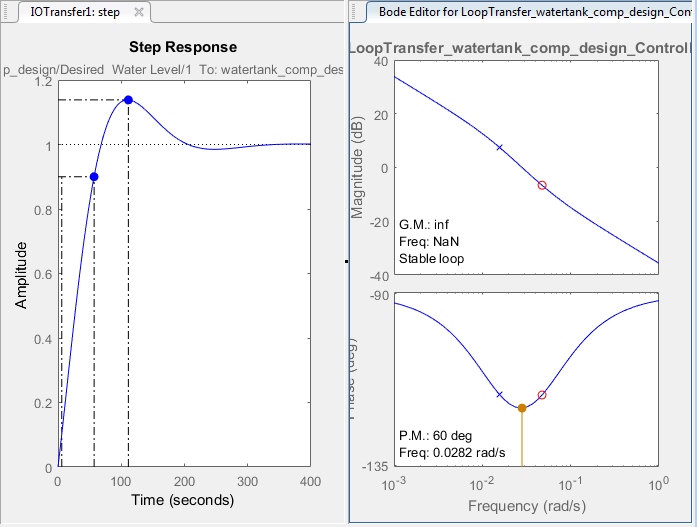
В диалоговом окне Select Response to Edit уже выбран ответ с разомкнутым контуром на выходе блока PID Controller. Чтобы открыть редактор Bode для этого ответа, щелкните Печать (Plot).
Для просмотра графики Редактор модов (Bode Editor) и Ответ шага (Step Response) на вкладке Вид (View) нажмите Левую/правую (Left/Right).
На графике Bode Editor перетащите отклик величины вверх, чтобы увеличить коэффициент усиления компенсатора. Увеличивая коэффициент усиления, вы увеличиваете пропускную способность и ускоряете отклик.
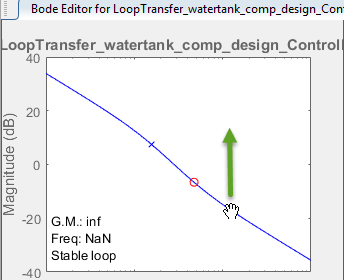
При перетаскивании ответа Боде вверх приложение автоматически обновляет компенсатор и связанные графики ответа. Кроме того, при освобождении графика в строке состояния справа приложение отображает обновленное значение коэффициента усиления.
Увеличьте коэффициент усиления компенсатора до тех пор, пока реакция на шаг не будет соответствовать проектным требованиям. Одним из возможных решений является установка коэффициента усиления равным 1.7.
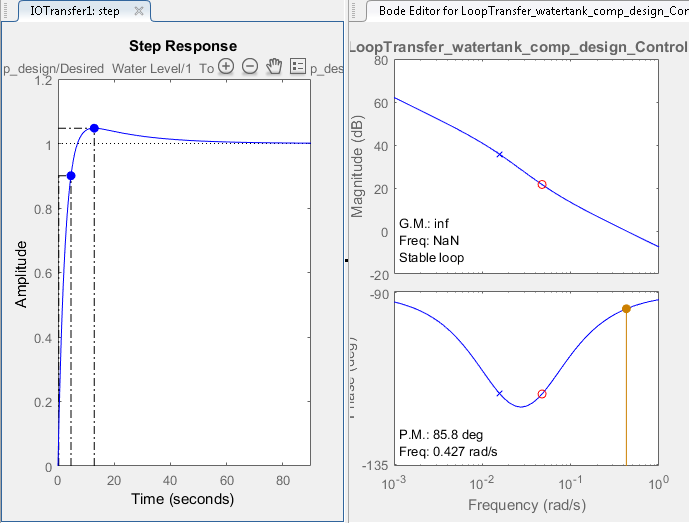
При этом значении коэффициента усиления отклик по замкнутому контуру имеет:
Максимальное превышение - 4,74%.
Время подъема 4,36 секунды.
Для непосредственной настройки параметров компенсатора используйте редактор компенсатора. В редакторе объектов щелкните правой кнопкой мыши область печати и выберите «Редактировать компенсатор».
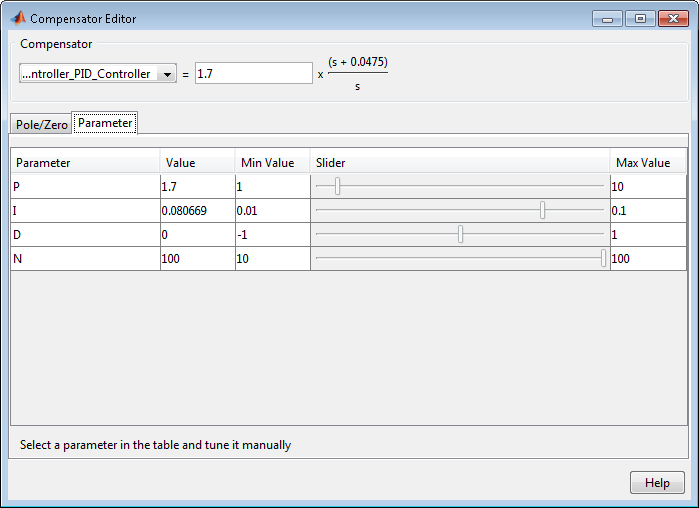
В диалоговом окне «Редактор компенсаторов» на вкладке «Параметры» настройте коэффициенты усиления контроллера PID. Дополнительные сведения о редактировании параметров компенсатора см. в разделе Настройка блоков Simulink с помощью редактора компенсаторов.
Пока настроенный компенсатор соответствует проектным требованиям, время отстаивания превышает 30 секунд. Для увеличения времени установки вручную отрегулируйте параметры P и I контроллера.
Например, задайте для параметров компенсатора значение:
P = 4
I = 0.1
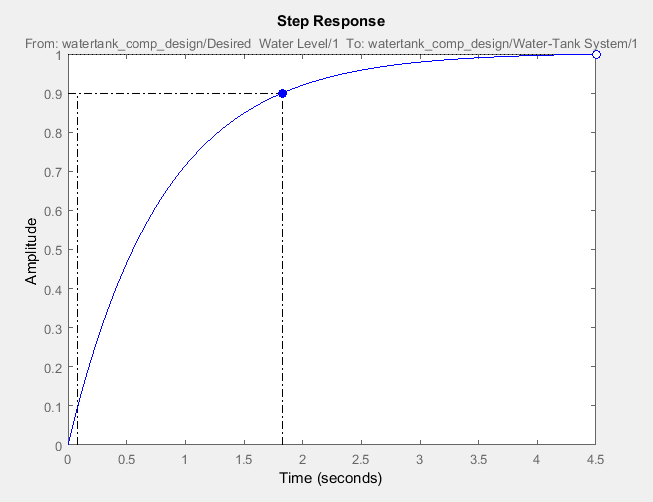
Этот компенсатор производит отклик по замкнутому контуру с:
Максимальное превышение 0,206%.
Время подъема 1,74 секунды.
Время установки около трех секунд.
Проверьте конструкцию компенсатора, смоделировав нелинейную модель Simulink с настроенными параметрами контроллера.
Чтобы записать настроенные параметры компенсатора в блок контроллера PID, в конструкторе систем управления на вкладке «Система управления» нажмите кнопку «Обновить блоки».
В окне модели Simulink запустите моделирование.
Для просмотра выходных данных моделирования по замкнутому контуру дважды щелкните на блоке «Область».
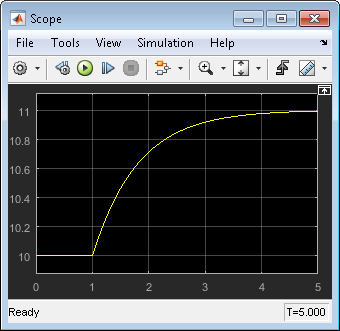
Реакция замкнутого контура нелинейной системы удовлетворяет проектным требованиям со временем нарастания менее пяти секунд и минимальным превышением.
Конструктор системы управления
