С помощью Control System Designer можно настраивать компенсаторы различными графическими и автоматизированными методами настройки.
Используйте графические методы настройки для интерактивного добавления, изменения и удаления полюсов контроллера, нулей и коэффициентов усиления.
| Метод настройки | Описание | Полезно для |
|---|---|---|
| Редактор модов | Настройте компенсатор, чтобы получить определенную частотную характеристику разомкнутого контура (формирование контура). | Регулировка полосы пропускания с разомкнутым контуром и проектирование с учетом характеристик коэффициента усиления и запаса по фазе. |
| Редактор модов с замкнутым контуром | Настройте предварительный фильтр, чтобы улучшить отклик системы по замкнутому циклу. | Улучшение эталонного отслеживания, отбраковки входных возмущений и отбраковки шума. |
| Редактор корневых локусов | Настройте компенсатор, чтобы создать положение полюсов с замкнутым контуром, соответствующее спецификациям конструкции. | Проектирование в соответствии со спецификациями проектирования во временной области, такими как максимальное превышение и время установки. |
| Редактор Николса | Настройте компенсатор, чтобы получить определенный отклик с разомкнутым контуром (формирование контура), комбинируя информацию о коэффициенте усиления и фазе на графике Николса. | Регулировка полосы пропускания с разомкнутым контуром и проектирование с учетом характеристик коэффициента усиления и запаса по фазе. |
При использовании графической настройки можно изменить компенсатор либо непосредственно из графиков редактора, либо с помощью редактора компенсатора. Общий подход к проектированию состоит в том, чтобы грубо настроить компенсатор с помощью графиков редактора, а затем использовать редактор компенсатора для точной настройки параметров компенсатора. Дополнительные сведения см. в разделе Изменение динамики компенсатора
Методы графической настройки не являются взаимоисключающими. Например, компенсатор можно настроить одновременно с помощью редактора Bode и редактора корневого локуса. Эта опция полезна при разработке спецификаций временной и частотной областей.
Примеры графической настройки см. в следующих разделах:
Используйте методы автоматической настройки для автоматической настройки компенсаторов в соответствии со спецификациями проекта.
| Метод настройки | Описание | Требования и ограничения |
|---|---|---|
| Настройка PID |
Автоматическая настройка усиления PID для балансировки производительности и надежности или настройки контроллеров с использованием классических формул настройки PID. |
Классические ПИД настроечные формулы требуют стабильного или интегрирующего эффективного растения. |
| Настройка на основе оптимизации |
Оптимизация параметров компенсатора с использованием проектных требований, заданных на графиках графической настройки и анализа. |
Требуется программное обеспечение Simulink ® Design Optimization™. Настройка параметров предварительно определенной структуры контроллера. |
| Синтез LQG |
Спроектируйте контроллер со стабилизирующей обратной связью полного порядка как линейно-квадратично-гауссовый (LQG) трекер. |
Максимальный заказ контроллера зависит от эффективной динамики завода. |
| Формирование петель |
Найдите стабилизирующий контроллер обратной связи полного порядка с заданной полосой пропускания или формой разомкнутого контура. |
Требуется программное обеспечение Toolbox™ надежного управления. Максимальный заказ контроллера зависит от эффективной динамики завода. |
| Настройка внутреннего управления моделью (IMC) |
Получите стабилизирующий контроллер обратной связи полного порядка, используя метод проектирования IMC. |
Предполагается, что система управления использует архитектуру IMC, которая содержит прогностическую модель динамики предприятия. Максимальный заказ контроллера зависит от эффективной динамики завода. |
Общий подход к проектированию заключается в создании начального компенсатора с использованием настройки PID, синтеза LQG, формирования петель или настройки IMC. Затем можно повысить производительность компенсатора с помощью настройки на основе оптимизации или графической настройки.
Дополнительные сведения о методах автоматической настройки см. в разделе Создание компенсатора с использованием методов автоматической настройки.
Эффективной установкой является система, управляемая компенсатором, которая содержит все элементы разомкнутого контура в модели, кроме настраиваемого компенсатора. На следующих диаграммах показаны примеры эффективных установок:
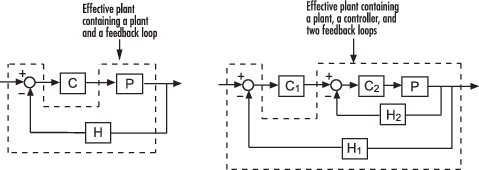
Знание свойств эффективной установки, которую видит ваш компенсатор, может помочь вам понять, какие методы настройки работают для вашей системы. Например, некоторые методы автоматической настройки применяются только к компенсаторам, открытые петли () которых имеют стабильные эффективные установки (). Кроме того, для таких способов настройки, как IMC и формирование цикла, максимальный порядок контроллера зависит от динамики эффективной установки.
Если компенсатор в модели Simulink имеет ограничения на свои полюса, нули или усиление, нельзя использовать синтез LQG, формирование цикла или настройку IMC. Например, с помощью этих методов невозможно настроить параметры блока контроллера PID. Если приложение требует ограничений контроллера, используйте альтернативный метод автоматической или графической настройки.
Кроме того, любые ограничения компенсатора в модели Simulink ограничивают структуру настроенного компенсатора. Например, при использовании настройки PID и настройке блока контроллера PID в качестве контроллера PI настроенный компенсатор должен иметь параметр нулевой производной.
Чтобы выбрать метод настройки, в конструкторе систем управления щелкните Методы настройки.
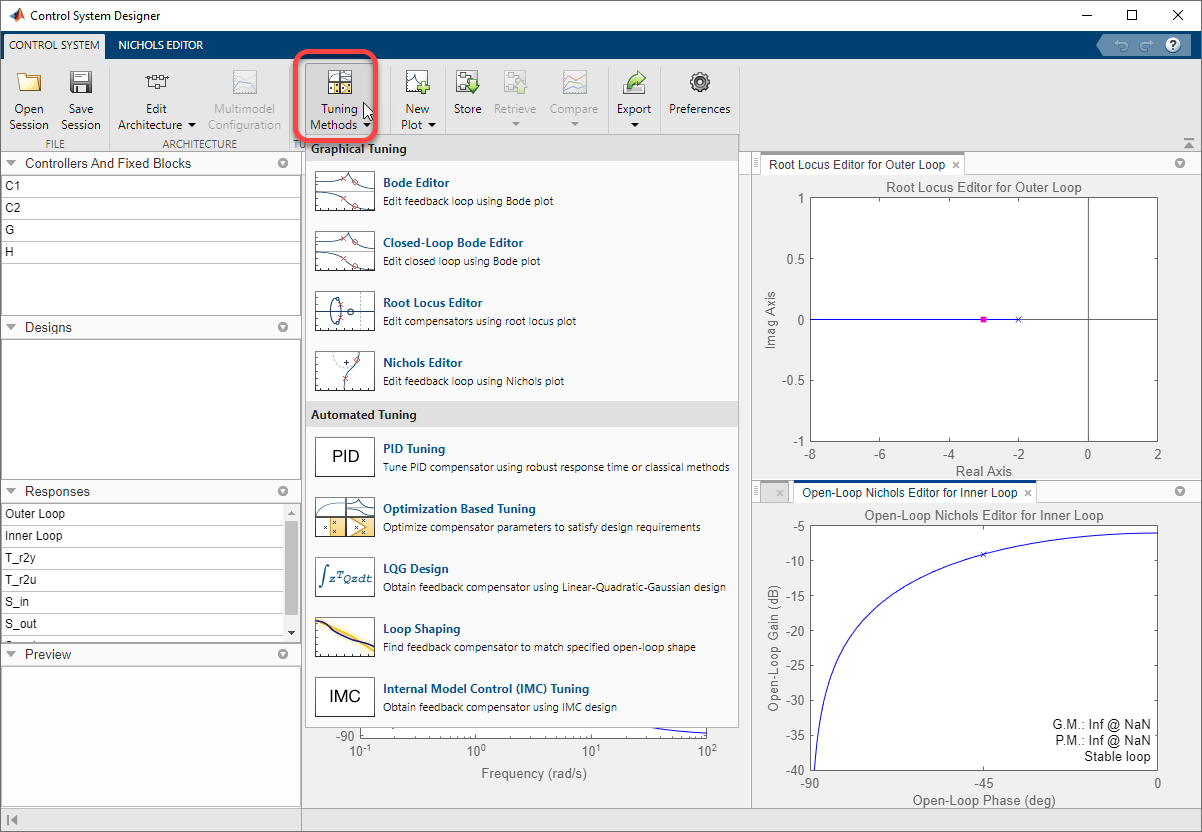
Конструктор системы управления
