Операционные точки для моделей с Simscape™ компонентами можно найти с помощью программного обеспечения Simulink ® Control Design™. В частности, установившиеся рабочие точки можно найти одним из следующих способов:
Отсечение на основе оптимизации (Optimization-based trimming) - задание ограничений на входах, выходах или состояниях модели и вычисление установившейся рабочей точки, удовлетворяющей этим ограничениям. Дополнительные сведения см. в разделе Расчет рабочих точек в установившемся состоянии.
По умолчанию можно определить спецификации рабочих точек для любых состояний Simulink и Simscape в модели, а также для всех портов ввода и вывода на корневом уровне модели. Можно также определить дополнительные выходные характеристики сигналов Simulink. Чтобы применить выходные спецификации к физическому сигналу Simscape, сначала преобразуйте сигнал с помощью блока PS-Simulink Converter (Simscape).
Имитационный снимок (Simulation snapshot) - задание начальных условий модели вблизи ожидаемой точки равновесия и моделирование модели до достижения устойчивого состояния. Затем можно создать рабочую точку на основе стационарных сигналов и состояний в модели. Дополнительные сведения см. в разделе Поиск рабочих точек в моментальных снимках моделирования.
Для получения лучших результатов обрезки для моделей Simscape можно использовать оптимизаторы обрезки на основе проекций. Эти оптимизаторы обеспечивают согласованность начального условия модели при каждой оценке целевой функции или нелинейной функции ограничения. Для использования оптимизаторов обрезки на основе проекций требуется программное обеспечение Optimization Toolbox™.
Эти оптимизаторы на основе проекций можно использовать при обрезке моделей из командной строки и в линеаризаторе модели.
Чтобы указать тип оптимизатора в командной строке, создайте findopOptions набор опций и укажите Optimizer один из следующих вариантов:
'lsqnonlin-proj' - Нелинейные наименьшие квадраты с проекцией
'graddescent-proj' - Градиентный спуск с проекцией
При использовании градиентного спуска с проекцией в командной строке можно указать, будет ли алгоритм применять исходные условия модели с использованием жестких или мягких ограничений, указав ConstraintType опция в findopOptions.
Чтобы указать тип оптимизатора в:
Диспетчер устойчивого состояния (Steady State Manager), откройте диалоговое окно Опции обрезки (Trim Options). На вкладке Спецификация (Specification) щелкните Опции обрезки (Trim Options).
Линеаризатор модели (Model Linearizer) - сначала откройте диалоговое окно Обрезать модель (Trim the model). На вкладке «Линейный анализ» в раскрывающемся списке «Рабочая точка» выберите Trim Model. Затем перейдите на вкладку «Параметры».
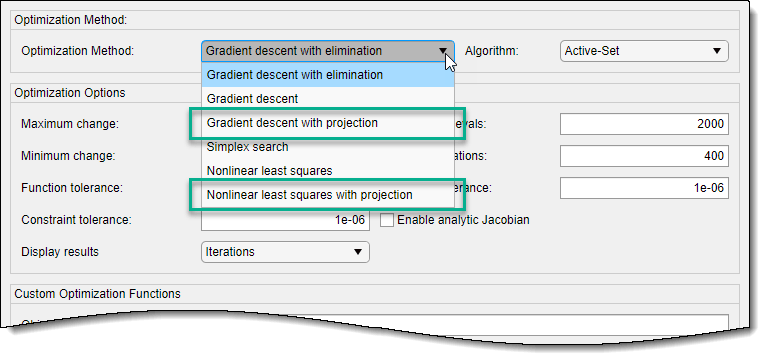
В раскрывающемся списке «Метод оптимизации» выберите оптимизатор.
При использовании градиентного спуска с проекцией в Диспетчере устойчивого состояния (Steady State Manager) или Линеаризаторе модели (Model Linearizer) алгоритм обеспечивает выполнение начальных условий модели с помощью жестких ограничений.
Пример использования оптимизации обрезки на основе проекции см. в разделе Моделирование устойчивого состояния с оптимизатором обрезки на основе проекции.
