С помощью моделирования модели можно найти установившуюся рабочую точку. Результирующая рабочая точка состоит из значений состояния и входных уровней модели в заданное время снимка моделирования.
Чтобы использовать вычисления рабочих точек на основе моделирования, сначала настройте исходные условия модели таким образом, чтобы модель сходилась к точке равновесия. Затем можно смоделировать модель и создать рабочие точки в интерактивном режиме с помощью Диспетчера устойчивого состояния (Steady State Manager) или Линеаризатора модели (Model Linearizer). Снимки также можно найти программным способом в командной строке MATLAB ® с помощью findop функция.
Чтобы найти операционные точки с помощью снимков, программа моделирует модель и создает операционную точку во время каждого снимка. Каждая операционная точка содержит входные значения и значения состояний модели в соответствующее время снимка.
Чтобы убедиться, что рабочая точка находится в устойчивом состоянии, инициализируйте модель со значениями рабочих точек, смоделируйте модель и проверьте, находятся ли ключевые сигналы и состояния в равновесии. Дополнительные сведения о инициализации модели с помощью рабочей точки см. в разделе Моделирование модели имитации в конкретной рабочей точке.
Примечание
Если модель Simulink ® содержит блоки с внутренними состояниями, не линеаризуйте модель в рабочей точке, вычисляемой на основе снимка моделирования. Вместо этого попробуйте провести линеаризацию модели с помощью имитационного снимка или в рабочей точке, найденной с помощью обрезки.
Можно найти рабочую точку в указанное время снимка моделирования с помощью Диспетчера устойчивого состояния (Steady State Manager).
Откройте модель Simulink.
sys = 'magball';
open_system(sys)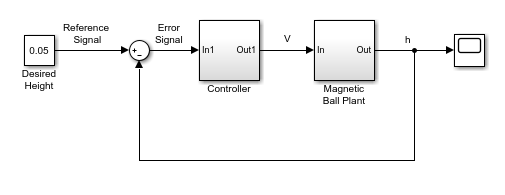
Чтобы открыть Диспетчер устойчивого состояния (Steady State Manager), в окне модели Simulink в галерее Apps щелкните Диспетчер устойчивого состояния (Steady State Manager).
Чтобы указать время снимка моделирования, в окне Диспетчер устойчивого состояния (Steady State Manager) на вкладке Устойчивое состояние (Steady State) щелкните Снимки (Snapshots).
Укажите связи моделирования для создания снимков. Для этого примера сделайте снимки 1 и 10 единиц времени. В диалоговом окне «Создание рабочей точки снимка» в поле «Время снимка моделирования» введите [1 10].
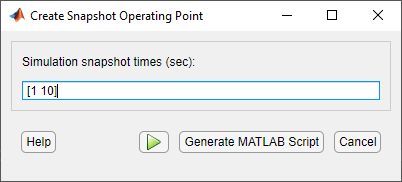
Для создания снимков нажмите.![]()
Массив рабочих точек, op1отображается в браузере данных в разделе «Рабочие точки». Этот массив содержит две рабочие точки, по одной для каждого указанного времени снимка.
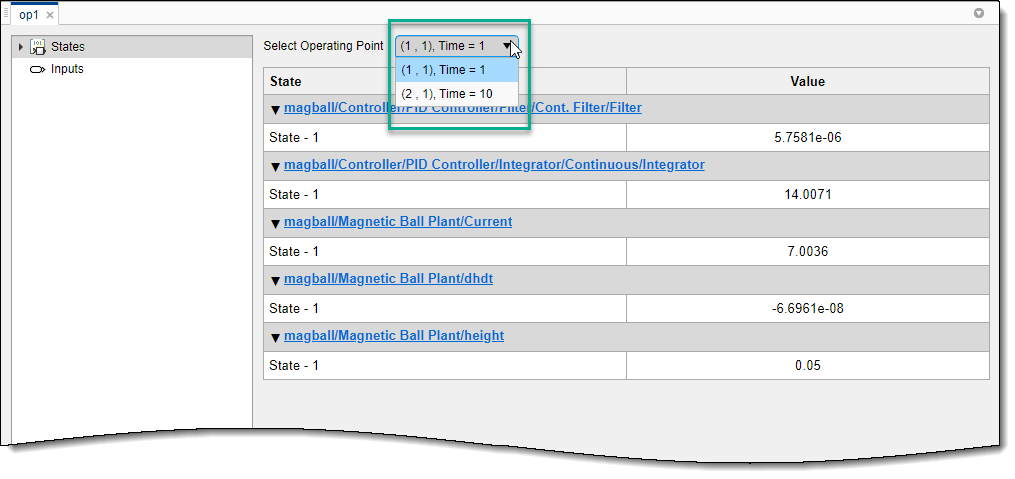
Программа также открывает соответствующий документ op1, в котором можно просмотреть рабочие точки.
Чтобы выбрать рабочую точку для просмотра, используйте выпадающий список Выбрать рабочую точку (Select Operating Point).
Можно найти рабочую точку в указанное время снимка моделирования с помощью линеаризатора модели.
Откройте модель Simulink.
sys = 'magball';
open_system(sys)
Чтобы открыть линеаризатор модели, в окне модели Simulink в галерее Apps щелкните Линеаризатор модели.
Чтобы задать время снимка моделирования, в линеаризаторе модели на вкладке «Линейный анализ» в раскрывающемся списке «Рабочая точка» выберите Take Simulation Snapshot.
Создание снимков моделирования в 1 и 10 единиц времени. В диалоговом окне Ввод времени снимка для линеаризации в поле Время снимка моделирования введите [1 10].
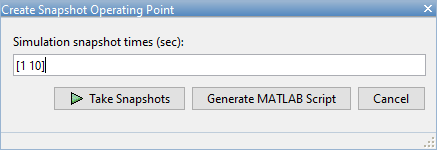
Чтобы сделать снимки, щелкните Сделать снимки.
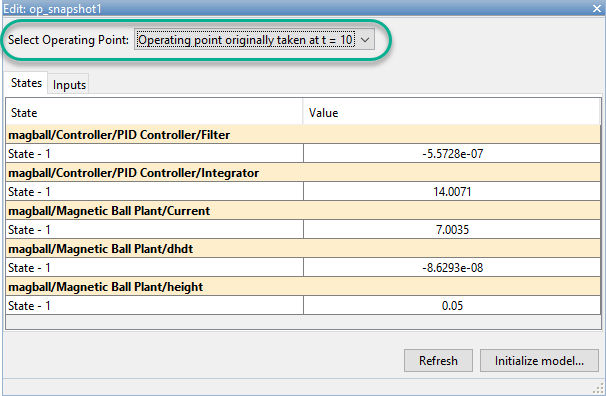
Массив рабочих точек, op_snapshot1, появляется в браузере данных в разделе «Рабочее пространство линейного анализа». Этот массив содержит две рабочие точки, по одной для каждого указанного времени снимка.
Для просмотра рабочих точек в рабочем пространстве линейного анализа дважды щелкните op_snapshot1. Можно выбрать операционную точку для просмотра с помощью выпадающего списка Выбрать операционную точку (Select Operating Point).
В этом примере показано, как вычислить установившуюся рабочую точку в указанное время снимка моделирования.
Откройте модель Simulink.
sys = 'magball';
open_system(sys)

Моделирование модели и создание рабочих точек в 1 и 10 единиц времени. Программа моделирует модель и вычисляет операционную точку при каждом моментальном снимке моделирования.
op = findop(sys,[1 10]);
op - вектор столбца рабочих точек с одним элементом для каждого заданного времени снимка.
Отображение первой рабочей точки.
op(1)
Operating point for the Model magball.
(Time-Varying Components Evaluated at time t=1)
States:
----------
(1.) magball/Controller/PID Controller/Filter/Cont. Filter/Filter
x: 5.76e-06
(2.) magball/Controller/PID Controller/Integrator/Continuous/Integrator
x: 14
(3.) magball/Magnetic Ball Plant/Current
x: 7
(4.) magball/Magnetic Ball Plant/dhdt
x: -6.7e-08
(5.) magball/Magnetic Ball Plant/height
x: 0.05
Inputs: None
----------
