Следовать ППМ для БПЛА
uavWaypointFollower Система object™ следует набору ППМ беспилотного летательного аппарата (БПЛА) с использованием точки обзора. Объект вычисляет точку обзора, требуемый курс и желаемое рыскание с учетом положения БПЛА, набора ППМ и расстояния поиска. Укажите набор ППМ и настройтеlookAheadDistance входной аргумент и TransitionRadius свойство для навигации по ППМ. Объект поддерживает как многороторные, так и стационарные БПЛА.
Для следования набору ППМ:
Создать uavWaypointFollower и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
wpFollowerObj = uavWaypointFollower создает толкатель ППМ БПЛА со свойствами по умолчанию.
wpFollowerObj = uavWaypointFollower(Name,Value) создает толкатель ППМ БПЛА с дополнительными опциями, заданными одним или несколькими Name,Value аргументы пары.
Name является именем свойства и Value - соответствующее значение. Name должно отображаться внутри отдельных кавычек (''). Можно указать несколько аргументов пары имя-значение в любом порядке как Name1,Value1,...,NameN,ValueN.
[ следует за набором ППМ, указанным в объекте-следителе ППМ. Объект занимает текущее положение и расстояние до точки поиска, чтобы вычислить точку до точки поиска на пути. Требуемый курс, рыскание и ошибка перекрестной дорожки также основаны на этой точке обзора по сравнению с текущим положением. lookaheadPoint,desiredCourse,desiredYaw,lookaheadDistFlag,crossTrackError,status] = wpFollowerObj(currentPose,lookaheadDistance)status возвращает ноль до тех пор, пока БПЛА не осуществит навигацию по всем ППМ.
Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
При следовании набору ППМ первый ППМ может игнорироваться на основании позы БПЛА. Из-за характера расстояния между путями, используемого для отслеживания пути, повторитель ППМ проверяет, находится ли БПЛА вблизи следующего ППМ для перехода к следующему сегменту пути с использованием переходной области. Однако существует также условие, при котором БПЛА переходит за пределы этого региона. В следующем ППМ рисуется 3-D гиперплоскость. Если поза БПЛА находится внутри этой гиперплоскости, толкатель ППМ переходит к следующему ППМ. Такое поведение помогает гарантировать, что БПЛА пойдет по достижимому пути.
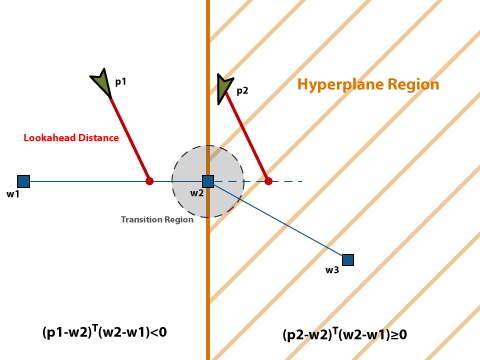
Условие гиперплоскости выполняется, если:
(p-w1) T (w2-w1) ≥ 0
p - положение БПЛА, а w1 и w2 - последовательные позиции ППМ.
Если вы находите такое поведение ограничивающим, рассмотрите возможность добавления дополнительных ППМ на основе исходной позы, чтобы заставить последователя перейти к исходной ППМ.
[1] Парк, Санхюк, Джон Дейст и Джонатан Хау. «Новая нелинейная логика управления для отслеживания траектории». Конференция по руководству, навигации и контролю АИАА и выставка 2004 года.
