Модель уменьшенного порядка для БПЛА
Инструментарий БПЛА/Алгоритмы
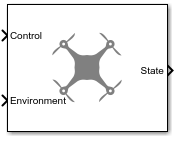
Блок модели наведения представляет собой модель наведения небольшого беспилотного летательного аппарата (БПЛА), которая оценивает состояние БПЛА на основе контрольных и экологических данных. Модель аппроксимирует поведение замкнутой системы, состоящей из контроллера автопилота и неподвижной или мультироторной кинематической модели для 3-D движения. Используйте этот блок в качестве модели наведения уменьшенного порядка для имитации своего БПЛА с фиксированным или многороторным управлением. Укажите тип модели, чтобы выбрать тип БПЛА. С помощью вкладки Initial State укажите начальное состояние БПЛА в зависимости от типа модели. На вкладке «Конфигурация» определяются параметры управления и физические параметры БПЛА.
Для БПЛА с БПЛА используются следующие уравнения для определения модели наведения БПЛА. Используйте derivative функция вычисления производной по времени состояния БПЛА с использованием этих управляющих уравнений. Укажите входные данные с помощью state, control, и environment функции.
Положение БПЛА в земном кадре составляет [xe, ye, h] с ориентацией в качестве угла курса, угла траектории полета и угла крена, [λ, γ, λ] в радианах.
Модель предполагает, что БПЛА летит в режиме скоординированного поворота, с нулевым боковым скольжением. Автопилот управляет скоростью, высотой и углом крена. Соответствующими уравнениями движения являются:
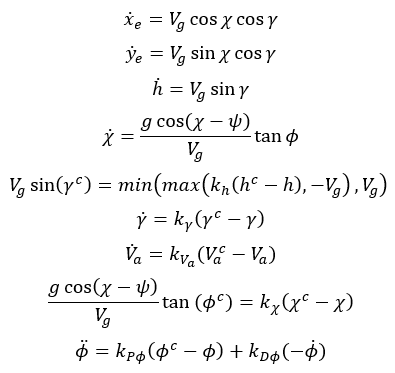
Va и Vg обозначают воздушную и наземную скорости БПЛА.
Скорость ветра определяется как [Vwn, Vwe, Vwd] для северного, восточного и нисходящего направлений. Чтобы создать структуру для этих входных данных, используйте environment функция.
k * - коэффициенты усиления контроллера. Чтобы указать эти выигрыши, используйте Configuration имущества fixedwing объект.
Из этих управляющих уравнений модель даёт следующие переменные: ![]()
Эти переменные соответствуют выходному сигналу state функция.
Для мультироторов для определения модели наведения БПЛА используются следующие уравнения. Для вычисления производной по времени состояния БПЛА с помощью этих управляющих уравнений используйте derivative функция. Укажите входные данные с помощью state, control, и environment.
Положение БПЛА в земной рамке - [xe, ye, ze] с ориентацией в виде углов ZYX Эйлера, [, ϴ, Угловые скорости составляют [p, q, r] в радианах в секунду.
В кадре корпуса БПЛА используются координаты [xb, yb, zb].
Матрица вращения, которая вращается от мира к корпусу, является:
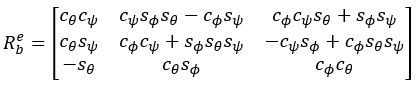
cos (x) и sin (x) сокращенно обозначаются как cx и sx.
Ускорение центра масс БПЛА в земных координатах регулируется:
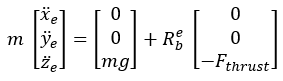
m - масса БПЛА, g - гравитация, а Fthrust - суммарная сила, создаваемая винтами, приложенными к мультиротору по оси -zb (указывает вверх в горизонтальной позе).
Контроллер ориентации крена с замкнутым контуром аппроксимируется поведением 2 независимых контроллеров PD для двух углов поворота и 2 независимых контроллеров P для скорости рыскания и тяги. Угловая скорость, угловое ускорение и тяга определяются:
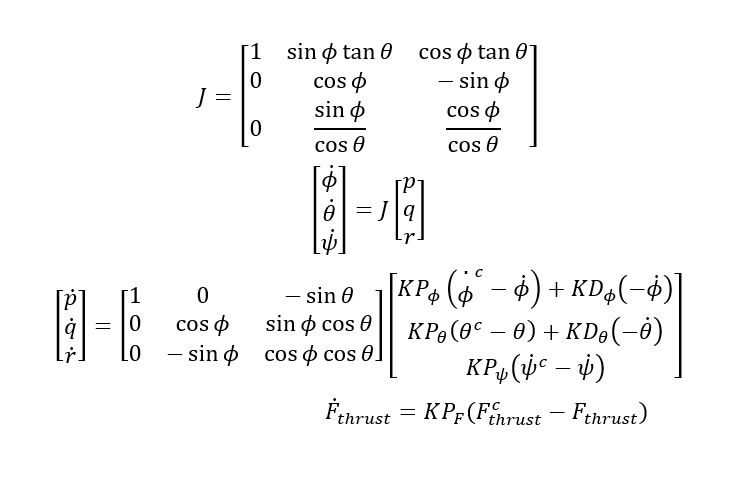
Эта модель предполагает, что автопилот берет в списке, которым командуют, подаче, темпе отклонения от курса, [ψc, ϴc, ϕ.c] и полная сила толчка, которой командуют, Fcthrust. Структура для указания этих входных данных генерируется из control.
Коэффициенты усиления P и D для управляющих входов задаются как KPα и KDα, где α - либо угол поворота, либо тяга. Эти усиления вместе с массой БПЛА, м, указаны в Configuration имущества multirotor объект.
Из этих управляющих уравнений модель даёт следующие переменные: ![]()
Эти переменные соответствуют выходному сигналу state функция.
[1] Рэндал У. Борода и Тимоти У. Маклейн. «Глава 9.» Теория и практика малых беспилотных летательных аппаратов, Нью-Джерси: Принстонский университет, пресса, 2012.
[2] Меллинджер, Дэниел и Натан Майкл. «Генерация траектории и управление для точных агрессивных маневров с квадроторами». Международный журнал исследований робототехники. 2012, стр. 664-74.
