Модель руководства для многороторных БПЛА
A multirotor объект представляет собой модель наведения с уменьшенным порядком для беспилотного летательного аппарата (БЛА). Модель аппроксимирует поведение замкнутой системы, состоящей из контроллера автопилота и мультироторной кинематической модели для 3-D движения.
Для получения информации о БПЛА см. fixedwing.
model = multirotor создает многороторную модель движения с помощью double значения точности для входных, выходных и конфигурационных параметров модели управления.
model = multirotor(DataType) задает точность типа данных (DataType свойство) для входных, выходных и конфигурационных параметров модели управления.
control | Команды управления БПЛА |
derivative | Производная по времени от состояний БПЛА |
environment | Экологические затраты на БПЛА |
state | Вектор состояния БПЛА |
В этом примере показано, как использовать multirotor модель наведения для имитации изменения состояния БПЛА за счет ввода команды.
Создайте многороторную модель управления.
model = multirotor;
Создание структуры состояния. Укажите местоположение в мировых координатах.
s = state(model); s(1:3) = [3;2;1];
Укажите команду управления, u, которые определяют крен и тягу мультиротора.
u = control(model); u.Roll = pi/12; u.Thrust = 1;
Создание среды по умолчанию без ветра.
e = environment(model);
Вычислите производную состояния по времени, заданную текущим состоянием, управляющей командой и средой.
sdot = derivative(model,s,u,e);
Моделирование состояния БПЛА с помощью ode45 интеграция. y поле выводит состояния многороторного БПЛА в виде матрицы 13 на n.
simOut = ode45(@(~,x)derivative(model,x,u,e), [0 3], s); size(simOut.y)
ans = 1×2
13 3536
Постройте график изменения угла крена на основе выходных данных моделирования. Угол крена (угол Эйлера X) - это 9-й ряд simOut.y выход.
plot(simOut.y(9,:))

Постройте график изменения позиций Y и Z. При заданных угле тяги и крена мультиротор должен пролететь и потерять некоторую высоту. Положительное значение для Z ожидается, так как положительное значение Z падает.
figure plot(simOut.y(2,:)); hold on plot(simOut.y(3,:)); legend('Y-position','Z-position') hold off

Можно также построить многороторную траекторию с помощью plotTransforms. Создайте векторы перемещения и вращения из моделируемого состояния. Понизить (каждый 300-й элемент) и транспонировать simOut элементы и преобразуют углы Эйлера в кватернионы. Укажите сетку в качестве multirotor.stl файл и положительное направление Z как "down". На отображаемом виде показан БПЛА, переводящий в направлении Y и теряющий высоту.
translations = simOut.y(1:3,1:300:end)'; % xyz position rotations = eul2quat(simOut.y(7:9,1:300:end)'); % ZYX Euler plotTransforms(translations,rotations,... 'MeshFilePath','multirotor.stl','InertialZDirection',"down") view([90.00 -0.60])

Для мультироторов для определения модели наведения БПЛА используются следующие уравнения. Для вычисления производной по времени состояния БПЛА с помощью этих управляющих уравнений используйте derivative функция. Укажите входные данные с помощью state, control, и environment.
Положение БПЛА в земной рамке - [xe, ye, ze] с ориентацией в виде углов ZYX Эйлера, [, ϴ, Угловые скорости составляют [p, q, r] в радианах в секунду.
В кадре корпуса БПЛА используются координаты [xb, yb, zb].
Матрица вращения, которая вращается от мира к корпусу, является:
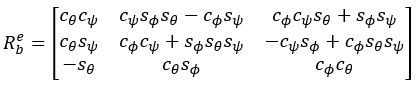
cos (x) и sin (x) сокращенно обозначаются как cx и sx.
Ускорение центра масс БПЛА в земных координатах регулируется:
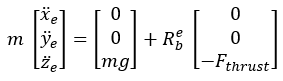
m - масса БПЛА, g - гравитация, а Fthrust - суммарная сила, создаваемая винтами, приложенными к мультиротору по оси -zb (указывает вверх в горизонтальной позе).
Контроллер ориентации крена с замкнутым контуром аппроксимируется поведением 2 независимых контроллеров PD для двух углов поворота и 2 независимых контроллеров P для скорости рыскания и тяги. Угловая скорость, угловое ускорение и тяга определяются:
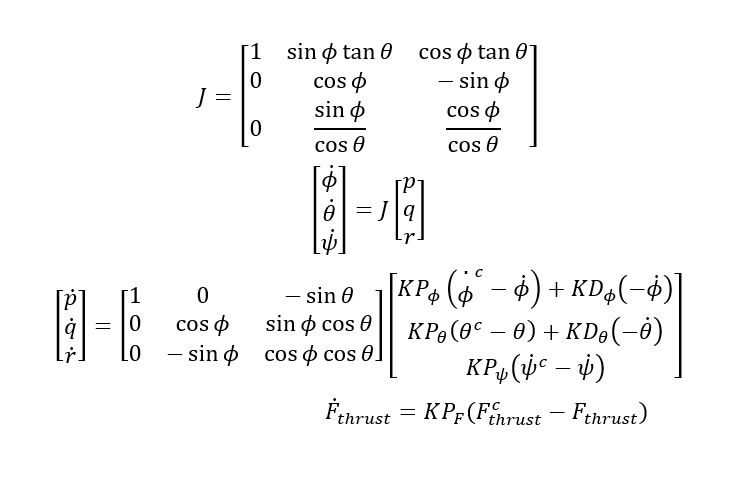
Эта модель предполагает, что автопилот берет в списке, которым командуют, подаче, темпе отклонения от курса, [ψc, ϴc, ϕ.c] и полная сила толчка, которой командуют, Fcthrust. Структура для указания этих входных данных генерируется из control.
Коэффициенты усиления P и D для управляющих входов задаются как KPα и KDα, где α - либо угол поворота, либо тяга. Эти усиления вместе с массой БПЛА, м, указаны в Configuration имущества multirotor объект.
Из этих управляющих уравнений модель даёт следующие переменные: ![]()
Эти переменные соответствуют выходному сигналу state функция.
[1] Меллинджер, Дэниел и Натан Майкл. «Генерация траектории и управление для точных агрессивных маневров с квадроторами». Международный журнал исследований робототехники. 2012, стр. 664-74.
