UAV Toolbox позволяет моделировать алгоритмы вождения в виртуальной среде, использующей Unreal Engine ® от Epic Games ®. В общем случае системы координат, используемые в этой среде, соответствуют правилам, описанным в разделе Системы координат для моделирования (Aerospace Toolbox). Однако при моделировании в этой среде важно иметь в виду конкретные различия и детали реализации систем координат.
БПЛА Toolbox использует эти системы координат для расчета динамики транспортного средства и объектов положения в среде визуализации Unreal Engine.
Окружающая среда | Описание | Системы координат |
|---|---|---|
Динамика БПЛА в Simulink ® | Правое правило устанавливает последовательность X-Y-Z и поворот координатных осей, используемых для расчета динамики транспортного средства. Интерфейс БПЛА Toolbox к среде моделирования Unreal Engine использует правосторонние (RH) декартовы системы координат:
| |
Нереальная визуализация движка | Для позиционирования объектов и запроса среды визуализации Unreal Engine в БПЛА Toolbox используется мировая система координат. |
Оси неподвижной системы координат (XE, YE, ZE) фиксируются в инерциальной системе координат. Инерциальный опорный кадр имеет нулевое линейное и угловое ускорение и нулевую угловую скорость. В ньютоновской физике Земля является инерциальным эталоном.
| Ось | Описание |
|---|---|
| КСЕНОН | Ось XE находится в прямом направлении транспортного средства. Оси XE и YE параллельны нулевой плоскости. Нулевая плоскость является горизонтальной плоскостью, перпендикулярной гравитационному вектору. |
| ВЫ | |
| ЗЕ | В ориентации Z-up положительная ось ZE указывает вверх. В ориентации Z-down положительная ось ZE указывает вниз. |
Моделирование летательных аппаратов и космических аппаратов проще всего, если использовать систему координат, закрепленную в самом корпусе. В случае летательных аппаратов направление движения вперед изменяется наличием ветра, и движение летательного аппарата по воздуху не совпадает с его движением относительно земли. Неинерциальная система координат тела зафиксирована как по началу, так и по ориентации к движущемуся судну. Предполагается, что судно является жестким. Ориентация координатных осей тела фиксируется в форме тела.
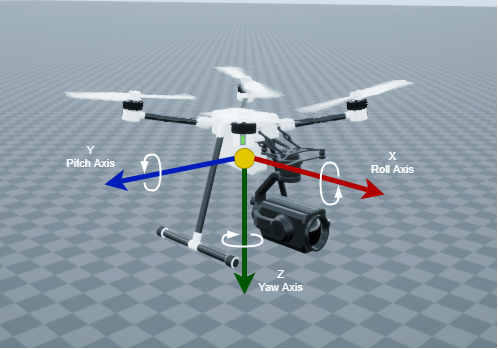
x-аксис указывает через нос судна.
y-axis указывает справа от x- ось (обращенная в направлении обзора пилота), перпендикулярная x-axis.
z- осевые точки вниз через дно судна, перпендикулярно x-y плоскость и удовлетворяющая правому правилу.
Перемещения определяются перемещением по этим осям на расстояния x, y, и z от происхождения.
![]()
Вращения определяются углами Эйлера P, Q, R или Φ, Θ, Ψ. Они являются
P или Λ: Крен вокруг x- ось
Q или Start: Шаг относительно y- ось
R или ПО: Yaw о z- ось
Если не указано иное, по умолчанию программа использует порядок поворота ZYX для углов Эйлера.
В среде Unreal Engine используется мировая система координат с осями, фиксированными в инерциальной системе координат.
![]()
| Ось | Описание |
|---|---|
| X | Направление движения транспортного средства вперед Крен - поворот правой стороны вокруг оси X |
| Y | Простирается справа от транспортного средства параллельно плоскости грунта Шаг - поворот вправо вокруг оси Y |
| Z | Выдвигается вверх Yaw - поворот левой стороны вокруг оси Z |
