Комбинированное колесо 2DOF скольжения с диском, барабаном или привязанным тормозом
Блоксеть/колеса и шины Vehicle Dynamics
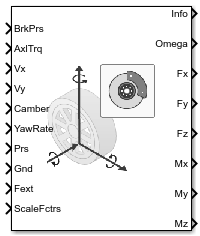
Блок Combined Slip Wheel 2DOF реализует продольное и боковое поведение колеса, характеризующегося магическими формулами [1] и [2]. Можно импортировать собственные данные о шинах или использовать наборы данных о встроенных шинах, предоставленные Глобальным центром моделирования производительности автомобилей (GCAPS). Использовать блок при моделировании трансмиссии и транспортного средства, где для определения ускорения, торможения и сопротивления качению колеса требуются низкочастотные силы движения шины и торможения. Блок подходит для применений, которые требуют комбинированного бокового скольжения, например, при исследованиях бокового движения и устойчивости к рысканию.
На основе крутящего момента трансмиссии, тормозного давления, высоты дороги, угла развала колеса и давления накачки блок определяет скорость вращения колеса, вертикальное движение, силы и моменты во всех шести степенях свободы (DOF). Используйте вертикальную степень свободы для изучения резонансов подвески шины из профиля дороги или движения шасси.
Используйте параметр Тип шины (Tire type) для выбора источника данных шины.
| Цель | Действие |
|---|---|
Реализация формулы Magic с использованием эмпирических уравнений [1] и [2]. В уравнениях используются коэффициенты подгонки, соответствующие параметрам блока. | Обновите параметры блока с помощью коэффициентов фитинга из файла:
|
Внедрение наборов данных по подогнанным шинам, предоставленных Глобальным центром моделирования производительности автомобилей (GCAPS). | Обновить соответствующие параметры блока с помощью данных о встроенных шинах GCAPS:
|
Используйте параметр «Тип тормоза» для выбора тормоза.
| Цель | Настройка типа тормоза |
|---|---|
Без торможения |
|
Реализовать тормоз, преобразующий давление тормозного цилиндра в тормозное усилие |
|
Реализовать симплексный барабанный тормоз, преобразующий приложенную силу и геометрию тормоза в чистый тормозной момент |
|
Реализовать таблицу поиска, которая является функцией скорости колеса и приложенного тормозного давления |
|
Блок вычисляет инерционный отклик колеса в зависимости от:
Потери оси
Крутящий момент тормоза и привода
Сопротивление качению шины
Контакт с землей через интерфейс шины-дорога
Для реализации магической формулы блок использует эти уравнения.
| Вычисление | Уравнения |
|---|---|
Продольная сила | Динамика шин и транспортных средств [2] уравнения 4.E9- 4.E57 |
Боковая сила - чистая боковая губа | Динамика шин и транспортных средств [2] уравнения 4.E19- 4.E30 |
Боковая сила - комбинированное скольжение | Динамика шин и транспортных средств [2] уравнения 4.E58- 4.E67 |
Вертикальная динамика | Динамика шин и транспортных средств [2] уравнения 4.E68, 4.E1, 4.E2a и 4.E2b |
Опрокидывающаяся пара | Уравнение динамики шин и транспортных средств [2] 4.E69 |
Сопротивление качению |
|
Выравнивающий момент | Уравнение динамики шин и транспортных средств [2] 4.E31- 4.E49 |
Выравнивающий крутящий момент - комбинированное скольжение | Уравнение динамики шин и транспортных средств [2] 4.E71- 4.E78 |
Входной крутящий момент представляет собой сумму приложенного крутящего момента оси, тормозного момента и момента, возникающего из комбинированного крутящего момента шины.
Tb + Td
На момент, возникающий от комбинированного крутящего момента шины, блок реализует тяговые силы колес и сопротивление качению с динамикой первого порядка. Сопротивление качению имеет постоянную времени, параметризованную в терминах длины релаксации.
Fx Re + My)
Если тормоза включены, блок определяет заблокированное или разблокированное состояние торможения на основе идеализированной модели трения сухого сцепления. На основе условия блокировки блок реализует эти модели трения и динамические модели.
| Если | Условие блокировки | Модель трения | Динамическая модель |
|---|---|---|---|
Незапертый | − Ri3) 3 (Ro2 − Ri2) | ||
Запертый | Ts |
Уравнения используют эти переменные.
| ω | Угловая скорость колеса |
| a | Компонент силы, не зависящий от скорости |
| b | Компонент силы линейной скорости |
| c | Компонент силы квадратичной скорости |
| Le | Длина релаксации шины |
| J | Момент инерции |
| Мой | Крутящий момент сопротивления качению |
| Ta | Крутящий момент оси вокруг оси вращения колеса |
| TB | Тормозной момент |
| Td | Комбинированный крутящий момент шины |
| Tf | Момент трения |
| Ti | Чистый входной крутящий момент |
| Tk | Кинетический момент трения |
| Кому | Чистый выходной крутящий момент |
| Ts | Статический фрикционный момент |
| ФК | Приложенное усилие сцепления |
| Fx | Продольное усилие, создаваемое дорожным покрытием шины из-за проскальзывания |
| Reff | Эффективный радиус сцепления |
| Ro | Внешний радиус кольцевого диска |
| Ri | Внутренний радиус кольцевого диска |
| Ре | Эффективный радиус шины при нагрузке и при заданном давлении |
| Vx | Скорость продольной оси |
| Fz | Нормальная сила транспортного средства |
| ɑ | Показатель давления в шинах |
| β | Показатель нормальной силы |
| пи | Давление в шинах |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
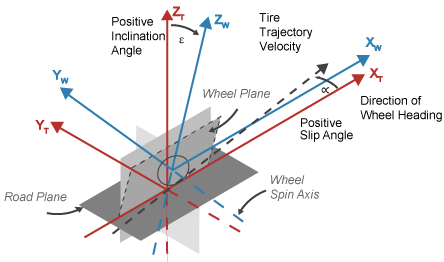
Для разрешения сил и моментов блок использует ориентацию Z-Up систем координат шины и колеса.
Оси системы координат шины (XT, YT, ZT) закреплены в опорной раме, прикрепленной к шине. Начало координат находится в контакте шины с землей.
Оси системы координат колеса (XW, YW, ZW) фиксируются в опорной раме, прикрепленной к колесу. Начало координат находится в центре колеса.
Ориентация Z-Up [1 ]
Если задан параметр «Тип тормоза» Discблок реализует дисковый тормоз. На этом рисунке показаны вид сбоку и спереди дискового тормоза.
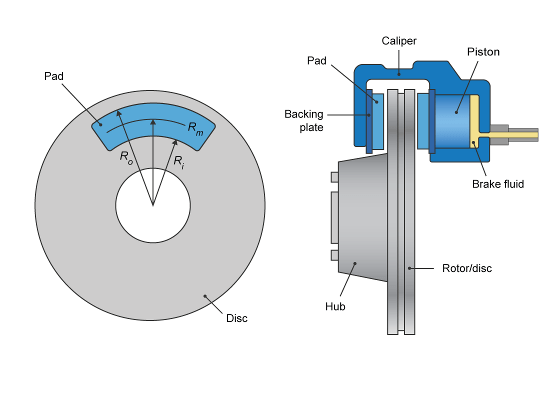
Дисковый тормоз преобразует давление в тормозном цилиндре в силу. Дисковый тормоз прикладывает усилие к среднему радиусу тормозной колодки.
Блок использует эти уравнения для вычисления тормозного момента дискового тормоза.
Ri2
Уравнения используют эти переменные.
| T | Тормозной момент |
| P | Приложенное тормозное давление |
| N | Скорость колеса |
| Npads | Количество тормозных колодок в узле дискового тормоза |
| μstatic | Коэффициент статического трения дисковой площадки-ротора |
| μ | Коэффициент кинетического трения дисковой площадки-ротора |
| Ba | Диаметр отверстия тормозного привода |
| Комната | Средний радиус приложения усилия тормозной колодки к тормозному ротору |
| Ro | Внешний радиус тормозной колодки |
| Ri | Внутренний радиус тормозной колодки |
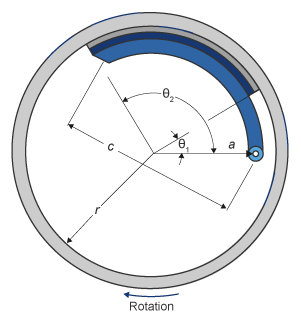
Если задан параметр «Тип тормоза» Drumблок реализует статический (стационарный) симплексный барабанный тормоз. Симплексный барабанный тормоз состоит из одного двустороннего гидропривода и двух тормозных колодок. Тормозные колодки не имеют общего шарнирного пальца.
Симплексная модель барабанного тормоза использует приложенную силу и геометрию тормоза для расчета чистого крутящего момента для каждой тормозной колодки. Модель барабана предполагает, что приводы и геометрия колодки симметричны для обеих сторон, позволяя использовать единый набор параметров геометрии и трения для обеих колодок.
Блок реализует уравнения, полученные из этих уравнений в основах элементов машины.
Уравнения используют эти переменные.
| T | Тормозной момент |
| P | Приложенное тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент статического трения дисковой площадки-ротора |
| μ | Коэффициент кинетического трения дисковой площадки-ротора |
| Trshoe | Тормозной момент правой колодки |
| Tlshoe | Тормозной момент левой колодки |
| a | Расстояние от центра барабана до центра оси шарнира колодки |
| c | Расстояние от центра оси шарнира колодки до соединения тормозного привода на тормозной колодке |
| r | Внутренний радиус барабана |
| Ba | Диаметр отверстия тормозного привода |
| Θ1 | Угол от центра оси шарнира колодки до начала материала тормозной колодки на колодке |
| Θ2 | Угол от центра оси шарнира колодки до конца материала тормозной колодки на колодке |
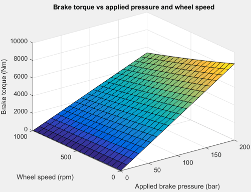
Если задан параметр «Тип тормоза» Mappedблок использует таблицу поиска для определения тормозного момента.
Уравнения используют эти переменные.
| T | Тормозной момент |
| N) | Таблица поиска тормозного момента |
| P | Приложенное тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент трения поверхности поверхности контакта барабана в статических условиях |
| μ | Коэффициент трения поверхности раздела диск-подушка-ротор |
Справочная таблица для тормозного момента, N), является функцией приложенного тормозного давления и скорости колеса, где:
T - тормозной момент в Н· м.
Р - давление торможения, в бар.
N - частота вращения колеса, в об/мин.
Tire Type - Выберите типExternal file (по умолчанию) | Light passenger car 205/60R15 | Mid-size passenger car 235/45R18 | Performance car 225/40R19 | SUV 265/50R20 | Light truck 275/65R18 | Commercial truck 295/75R22.5Используйте параметр Тип шины (Tire type) для выбора источника данных шины.
| Цель | Действие |
|---|---|
Реализация формулы Magic с использованием эмпирических уравнений [1] и [2]. В уравнениях используются коэффициенты подгонки, соответствующие параметрам блока. | Обновите параметры блока с помощью коэффициентов фитинга из файла:
|
Внедрение наборов данных по подогнанным шинам, предоставленных Глобальным центром моделирования производительности автомобилей (GCAPS). | Обновить соответствующие параметры блока с помощью данных о встроенных шинах GCAPS:
|
Brake Type - Выберите типNone | Disc | Drum | MappedИспользуйте параметр «Тип тормоза» для выбора тормоза.
| Цель | Настройка типа тормоза |
|---|---|
Без торможения |
|
Реализовать тормоз, преобразующий давление тормозного цилиндра в тормозное усилие |
|
Реализовать симплексный барабанный тормоз, преобразующий приложенную силу и геометрию тормоза в чистый тормозной момент |
|
Реализовать таблицу поиска, которая является функцией скорости колеса и приложенного тормозного давления |
|
Static friction coefficient, mu_static - Статическое трение.3 (по умолчанию) | scalarКоэффициент статического трения, безразмерный.
Чтобы включить этот параметр, для параметра «Тип тормоза» укажите один из следующих типов:
Disc
Drum
Mapped
Kinetic friction coefficient, mu_kinetic - Кинетическое трение.2 (по умолчанию) | scalarКоэффициент кинематического трения, безразмерный.
Чтобы включить этот параметр, для параметра «Тип тормоза» укажите один из следующих типов:
Disc
Drum
Mapped
Disc brake actuator bore, disc_abore - Расстояние ствола.05 (по умолчанию) | scalarОтверстие привода дискового тормоза, в м.
Для включения параметров дискового тормоза выберите Disc для параметра «Тип тормоза».
Brake pad mean radius, Rm - Радиус.177 (по умолчанию) | scalarСредний радиус тормозной колодки, в м.
Для включения параметров дискового тормоза выберите Disc для параметра «Тип тормоза».
Number of brake pads, num_pads - Подсчет2 (по умолчанию) | scalarКоличество тормозных колодок.
Для включения параметров дискового тормоза выберите Disc для параметра «Тип тормоза».
Drum brake actuator bore, disc_abore - Расстояние ствола0.0508 (по умолчанию) | scalarОтверстие привода тормоза барабана, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin to drum center distance, drum_a - Расстояние0.123 (по умолчанию) | scalarРасстояние от штифта до центра барабана, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin center to force application point distance, drum_c - Расстояние0.212 (по умолчанию) | scalarЦентр штифта колодки для приложения усилия к расстоянию точки приложения, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Drum internal radius, drum_r - Радиус0.15 (по умолчанию) | scalarВнутренний радиус барабана, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin to pad start angle, drum_theta1 - Угол0 (по умолчанию) | scalarШтифт колодки - начальный угол в град.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin to pad end angle, drum_theta2 - Угол126 (по умолчанию) | scalarШтифт башмака к торцу прокладки, в град.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Brake actuator pressure breakpoints, brake_p_bpt - Точки остановаvectorТочки останова тормозного привода, бар.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра «Тип тормоза».
Wheel speed breakpoints, brake_n_bpt - Точки остановаvectorТочки останова колеса, в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра «Тип тормоза».
Brake torque map, f_brake_t - Таблица подстановкиarrayСправочная таблица для тормозного момента, N), является функцией приложенного тормозного давления и скорости колеса, где:
T - тормозной момент в Н· м.
Р - давление торможения, в бар.
N - частота вращения колеса, в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра «Тип тормоза».
Tire file or object, tireParamSet - Файл шинvdynPassCar.mat (по умолчанию) | .tir | .txtФайл шины .tir или объект, содержащий эмпирические данные для моделирования продольного и бокового поведения шины с помощью магической формулы. Если вы предоставляете .txt убедитесь, что файл содержит имена, соответствующие параметрам блока.
Обновите параметры блока с помощью коэффициентов фитинга из файла:
Задайте для параметра «Тип шины» значение External file.
На панели «Параметры колеса и шины» > «Шина» выберите «Выбрать файл».
Выберите файл коэффициентов шины.
Выберите Обновить значения маски из файла. В диалоговом окне с запросом подтверждения нажмите кнопку ОК. Блок обновляет параметры.
Выберите «Применить».
Maximum pressure, PRESMAX - Давление1003118 (по умолчанию) | scalarМаксимальное давление, PRESMAX, в Па
Minimum pressure, PRESMIN - Давление9982 (по умолчанию) | scalarМинимальное давление, PRESMIN, в Па
Maximum normal force, FZMAX - Сила10000 (по умолчанию) | scalarМаксимальная нормальная сила, FZMAX, в Н.
Minimum normal force, FZMIN - Сила100 (по умолчанию) | scalarМинимальная нормальная сила, FZMIN, в Н.
Velocity tolerance used to handle low velocity situations, VXLOW - Допуск0.1 (по умолчанию) | scalarДопуск скорости, используемый для обработки ситуаций низкой скорости, VXLOW, в м/с.
Max allowable slip ratio (absolute), KPUMAX - Коэффициент1.5 (по умолчанию) | scalarМакс. допустимый коэффициент проскальзывания (абсолютный), KPUMAX, безразмерный.
Minimum allowable slip ratio (absolute), KPUMIN - Коэффициент-1.5 (по умолчанию) | scalarМинимально допустимый коэффициент проскальзывания (абсолютный), KPUMIN, безразмерный.
Max allowable slip angle (absolute), ALPMAX - Угол1.5708 (по умолчанию) | scalarМаксимальный допустимый угол скольжения (абсолютный), ALPMAX, в рад.
Minimum allowable slip angle (absolute), ALPMIN - Угол-1.5708 (по умолчанию) | scalarМинимальный допустимый угол проскальзывания (абсолютный), ALPMIN, в рад.
Maximum allowable camber angle, CAMMAX - Угол0.173 (по умолчанию) | scalarМаксимально допустимый угол развала CAMMAX, в рад.
Minimum allowable camber angle, CAMMIN - Угол-0.173 (по умолчанию) | scalarМинимальный допустимый угол развала, CAMMIN, в рад.
Nominal longitudinal speed, LONGVL - Скорость16.7 (по умолчанию) | scalarНоминальная продольная скорость, LONGVL, в м/с.
Initial rotational velocity, omegao - Скорость0 (по умолчанию) | scalarНачальная скорость вращения, в рад/с.
Rotational damping, br - Демпфирование1e-3 (по умолчанию) | scalarРотационное демпфирование, br, в Н· м· с/рад.
Unloaded radius, UNLOADED_RADIUS - Радиус0.309 (по умолчанию) | scalarНезагруженный радиус, UNLOADED_RADIUS, в м.
Nominal pressure, NOMPRES - Давление224006 (по умолчанию) | scalarНоминальное давление, NOMPRES, в Па
Nominal normal force, FNOMIN - Сила4025 (по умолчанию) | scalarНоминальная нормальная сила, FNOMIN, в Н.
Wheel width, WIDTH - Ширина0.209 (по умолчанию) | scalarШирина колеса, WIDTH, в м.
Rim radius, RIM_RADIUS - Радиус.19 (по умолчанию) | scalarРадиус обода, RIM_RADIUS, в м.
Wheel mass, MASS - Масса9.465 (по умолчанию) | scalarМасса колеса, МАССА, в кг.
Rotational inertia (rolling axis), IYY - Инерция0.74 (по умолчанию) | scalarИнерция вращения (ось качения), IYY, в кг· м ^ 2.
Gravity, GRAVITY - Гравитация-9.81 (по умолчанию) | scalarГравитация, ГРАВИТАЦИЯ, в м/с ^ 2.
Initial tire displacement, zo - Смещение0 (по умолчанию) | scalarНачальное смещение шины, zo, в м.
Initial wheel vertical velocity (wheel fixed frame), zdoto - Скорость0 (по умолчанию) | scalarНачальная вертикальная скорость колеса (неподвижная рама колеса), zdoto, в м/с.
Effective rolling radius at low load stiffness, BREFF - Жесткость8.25094594147963 (по умолчанию) | scalarЭффективный радиус качения при низкой жесткости нагрузки, BREFF, безразмерный.
Effective rolling radius peak value, DREFF - Радиус0.260468730454265 (по умолчанию) | scalarЭффективное значение пика радиуса качения, DREFF, безразмерный.
Effective rolling radius at high load stiffness, FREFF - Радиус0.0735298544471851 (по умолчанию) | scalarЭффективный радиус качения при высокой жесткости нагрузки, FREFF, безразмерный.
Unloaded to nominal rolling radius ratio, Q_RE0 - Коэффициент1.00866439868088 (по умолчанию) | scalarОтношение радиуса разгрузки к номинальному радиусу прокатки, Q_RE0, безразмерный.
Radius rotational speed dependence, Q_V1 - Скорость0.000760413786224011 (по умолчанию) | scalarЗависимость скорости вращения радиуса, Q_V1, безразмерность.
Stiffness rotational speed dependence, Q_V2 - Скорость0.0463384792019201 (по умолчанию) | scalarЗависимость скорости вращения жесткости, Q_V2, безразмерность.
Linear load change with deflection, Q_FZ1 - Изменение нагрузки0 (по умолчанию) | scalarЛинейное изменение нагрузки с отклонением, Q_FZ1, безразмерность.
Quadratic load change with deflection, Q_FZ2 - Изменение нагрузки15.6870832810226 (по умолчанию) | scalarКвадратичная нагрузка изменяется с отклонением, Q_FZ2, безразмерностью.
Linear load change with deflection and quadratic camber, Q_FZ3 - Изменение нагрузки0 (по умолчанию) | scalarЛинейное изменение нагрузки с отклонением и квадратичным развалом, Q_FZ3, безразмерным.
Load response to longitudinal force, Q_FCX - Сила0.138643970247602 (по умолчанию) | scalarРеакция нагрузки на продольную силу, Q_FCX, безразмерность.
Load response to lateral force, Q_FCY - Сила0.10843499565426 (по умолчанию) | scalarРеакция нагрузки на боковую силу, Q_FCY, безразмерность.
Vertical stiffness change due to lateral load dependency on lateral stiffness, Q_FCY2 - Жесткость-0.465763352339538 (по умолчанию) | scalarИзменение вертикальной жесткости вследствие зависимости поперечной нагрузки от поперечной жесткости, Q_FCY2, безразмерности.
Stiffness response to pressure, PFZ1 - Жесткость0.69958166705601 (по умолчанию) | scalarРеакция жесткости на давление, PFZ1, безразмерность.
Vertical tire stiffness, VERTICAL_STIFFNESS - Жесткость207885.061134007 (по умолчанию) | scalarВертикальная жесткость шины, VERTICAL_STIFFNESS, в Н/м.
Vertical tire damping, VERTICAL_DAMPING - Демпфирование494.649255786991 (по умолчанию) | scalarВертикальное демпфирование шины, VERTICAL_DAMPING, в Н· с/м.
Rim bottoming out offset, BOTTOM_OFFST - Смещение.01 (по умолчанию) | scalarСмещение днища обода, BOTTOM_OFFST, в м.
Bottoming out stiffness, BOTTOM_STIFF - Жесткость2e6 (по умолчанию) | scalarКубовая жесткость, BOTTOM_STIFF, в Н/м.
Longitudinal stiffness, LONGITUDINAL_STIFFNESS - Жесткость388714.175879854 (по умолчанию) | scalarПродольная жесткость, LONGITUDINAL_STIFFNESS, в Н/м.
Lateral stiffness, LATERAL_STIFFNESS - Жесткость157087.404633332 (по умолчанию) | scalarПродольная жесткость, LATERAL_STIFFNESS, в Н/м.
Linear vertical deflection influence on longitudinal stiffness, PCFX1 - Влияние прогиба0.18539229191199 (по умолчанию) | scalarЛинейное вертикальное отклонение влияет на продольной жесткости, PCFX1, безразмерном.
Quadratic vertical deflection influence on longitudinal stiffness, PCFX2 - Влияние прогиба0 (по умолчанию) | scalarКвадратичное вертикальное отклонение влияет на продольную жесткость, PCFX2, безразмерность.
Pressure dependency on longitudinal stiffness, PCFX3 - Зависимость от давления0 (по умолчанию) | scalarЗависимость давления от продольной жесткости, PCFX3, безразмерность.
Linear vertical deflection influence on lateral stiffness, PCFY1 - Влияние прогиба0.163183345037677 (по умолчанию) | scalarЛинейное вертикальное отклонение влияет на боковой жесткости, PCFY1, безразмерном.
Quadratic vertical deflection influence on lateral stiffness, PCFY2 - Влияние прогиба0 (по умолчанию) | scalarКвадратичное вертикальное отклонение влияет на поперечную жесткость, PCFY2, безразмерность.
Pressure dependency on longitudinal stiffness, PCFY3 - Зависимость от давления0.249094918231954 (по умолчанию) | scalarЗависимость давления от продольной жесткости, PCFY3, безразмерность.
Contact length square root term, Q_RA1 - Срок действия0.675942571700787 (по умолчанию) | scalarДлина контакта квадратный корень член, Q_RA1, безразмерный.
Contact length linear term, Q_RA2 - Срок действия0.73800463546164 (по умолчанию) | scalarЛинейный член длины контакта, Q_RA2, безразмерный.
Contact width root term, Q_RB1 - Срок ширины1.04487486456705 (по умолчанию) | scalarКорневой член ширины контакта, Q_RB1, безразмерный.
Contact width linear term, Q_RB2 - Срок ширины-1.191763806629 (по умолчанию) | scalarЛинейный член ширины контакта Q_RB2, безразмерный.
Cfx shape factor, PCX1 - Коэффициент формы1.58523057950359 (по умолчанию) | scalarКоэффициент формы, Cfx, PCX1, безразмерный.
Longitudinal friction at nominal normal load, PDX1 - Трение1.0239116238178 (по умолчанию) | scalarПродольное трение при номинальной нормальной нагрузке, PDX1, безразмерное.
Frictional variation with load, PDX2 - Изменение трения-0.0842405110022724 (по умолчанию) | scalarВариация трения с нагрузкой, PDX2, безразмерность.
Frictional variation with camber, PDX3 - Изменение трения0 (по умолчанию) | scalarВариация трения с развалом, PDX3, в 1/рад ^ 2.
Longitudinal curvature at nominal normal load, PEX1 - Кривизна0.110312777158455 (по умолчанию) | scalarПродольная кривизна при номинальной нормальной нагрузке, PEX1, безразмерная.
Variation of curvature factor with load, PEX2 - Изменение кривизны0.313468516038146 (по умолчанию) | scalarИзменение коэффициента кривизны с нагрузкой, PEX2, безразмерность.
Variation of curvature factor with square of load, PEX3 - Изменение кривизны0 (по умолчанию) | scalarИзменение коэффициента кривизны с квадратом нагрузки, PEX3, безразмерность.
Longitudinal curvature factor with slip, PEX4 - Кривизна0.0016060905760045 (по умолчанию) | scalarКоэффициент продольной кривизны с проскальзыванием, PEX4, безразмерность.
Longitudinal slip stiffness at nominal normal load, PKX1 - Жесткость21.3872544684023 (по умолчанию) | scalarЖесткость продольного скольжения при номинальной нормальной нагрузке, PKX1, безразмерная.
Variation of slip stiffness with load, PKX2 - Изменение жесткости14.0006541873175 (по умолчанию) | scalarИзменение жесткости скольжения с нагрузкой, PKX1, безразмерность.
Slip stiffness exponent factor, PKX3 - Жесткость скольжения-0.405326109653452 (по умолчанию) | scalarКоэффициент степени жесткости проскальзывания, PKX3, безразмерность.
Horizontal shift in slip ratio at nominal normal load, PHX1 - Сдвиг коэффициента проскальзывания0.000212599305364818 (по умолчанию) | scalarГоризонтальное смещение коэффициента скольжения при номинальной нормальной нагрузке, PHX1, безразмерное.
Variation of horizontal slip ratio with load, PHX2 - Изменение проскальзывания0.00115950515263055 (по умолчанию) | scalarИзменение горизонтального отношения промаха с грузом, PHX2, безразмерным.
Vertical shift in load at nominal normal load, PVX1 - Сдвиг нагрузки1.59236164471432e-05 (по умолчанию) | scalarВертикальное изменение в грузе при номинальной нормальной нагрузке, PVX1, безразмерном.
Variation of vertical shift with load, PVX2 - Изменение нагрузки0.000104321112127671 (по умолчанию) | scalarИзменение вертикального изменения с грузом, PVX2, безразмерным.
Linear variation of longitudinal slip stiffness with tire pressure, PPX1 - Изменение жесткости-0.349461321276586 (по умолчанию) | scalarЛинейное изменение продольной жесткости промаха с давлением в шине, PPX1, безразмерным.
Quadratic variation of longitudinal slip stiffness with tire pressure, PPX2 - Изменение жесткости0.387840040616429 (по умолчанию) | scalarКвадратичное изменение жесткости продольного проскальзывания при давлении в шине, PPX2, безразмерном.
Linear variation of peak longitudinal friction with tire pressure, PPX3 - Изменение трения-0.0969947336569324 (по умолчанию) | scalarЛинейное изменение пикового продольного трения с давлением в шине, PPX3, безразмерным.
Quadratic variation of peak longitudinal friction with tire pressure, PPX4 - Изменение трения0.0632271859795801 (по умолчанию) | scalarКвадратное изменение пикового продольного трения с давлением в шине, PPX4, безразмерным.
Combined slip Fx slope factor reduction, RBX1 - Комбинированное снижение коэффициента наклона продольной силы скольжения12.7633329850276 (по умолчанию) | scalarКомбинированная продольная сила скольжения, Fx, уменьшение коэффициента наклона, RBX1, безразмерность.
Slip ratio Fx slope reduction variation, RBX2 - Коэффициент проскальзывания продольных отклонений уклона силы9.5787123658471 (по умолчанию) | scalarКоэффициент проскальзывания продольная сила, Fx, изменение наклона, RBX2, безразмерность.
Camber influence on combined slip Fx stiffness, RBX3 - Влияние развала на продольную жесткость комбинированного скольжения0 (по умолчанию) | scalarВлияние развала на комбинированную продольную силу скольжения, Fx, жесткость, RBX3, безразмерность.
Shape factor for combined slip Fx reduction, RCX1 - Коэффициент формы для комбинированного уменьшения продольной силы скольжения1.02796280922059 (по умолчанию) | scalarКоэффициент формы для комбинированной продольной силы скольжения, Fx, редукции, RCX1, безразмерности.
Combined Fx curvature factor, REX1 - Коэффициент кривизны комбинированной продольной силы-0.45202516851367 (по умолчанию) | scalarКомбинированная продольная сила, Fx, коэффициент кривизны, REX1, безразмерность.
Combined Fx curvature factor with load, REX2 - Коэффициент кривизны комбинированной продольной силы-0.47304886171176 (по умолчанию) | scalarКомбинированная продольная сила, Fx, коэффициент кривизны с нагрузкой, REX2, безразмерность.
Combined slip Fx shift factor reduction, RHX1 - Коэффициент продольного проскальзывания комбинированного проскальзывания0.000233272373115809 (по умолчанию) | scalarКомбинированная продольная сила скольжения, Fx, уменьшение коэффициента сдвига, RHX1, безразмерность.
Vertical shift of overturning moment, QSX1 - Опрокидывающий момент-0.00788307788961443 (по умолчанию) | scalarВертикальное смещение опрокидывающего момента, QSX1, безразмерное.
Overturning moment due to camber, QSX2 - Опрокидывающий момент от развала0.954629515459396 (по умолчанию) | scalarОпрокидывающий момент из-за развала, QSX2, безразмерности.
Overturning moment due to Fy, QSX3 - Опрокидывающий момент от бокового усилия0.0155855777667025 (по умолчанию) | scalarОпрокидывающий момент за счет поперечной силы, QSX3, безразмерный.
Mx combined lateral force load and camber, QSX4 - Опрокидывающий момент0.125904607142414 (по умолчанию) | scalarОпрокидывающий момент, Mx, момент комбинированной поперечной нагрузки и развала, QSX4, безразмерный.
Mx load effect due to lateral force and camber, QSX5 - Опрокидывающий момент1.01110069703963 (по умолчанию) | scalarОпрокидывающий момент, Mx, нагрузочный эффект от поперечной силы и развала, QSX5, безразмерный.
Mx load effect due to B-factor, QSX6 - Опрокидывающий момент20.1938577118433 (по умолчанию) | scalarОпрокидывающий момент, Mx, эффект нагрузки от В-фактора, QSX6, безразмерный.
Mx due to camber and load, QSX7 - Опрокидывающий момент0.310818120717083 (по умолчанию) | scalarОпрокидывающий момент, Mx, из-за развала и нагрузки, QSX7, безразмерный.
Mx due to lateral force and load, QSX8 - Опрокидывающий момент-0.0430823751139655 (по умолчанию) | scalarОпрокидывающий момент, Mx, за счет поперечной силы и нагрузки, QSX8, безразмерный.
Mx due to B-factor of lateral force and load, QSX9 - Опрокидывающий момент0.636494404888216 (по умолчанию) | scalarОпрокидывающий момент, Mx, за счет В-фактора поперечной силы и нагрузки, QSX9, безразмерный.
Mx due to vertical force and camber, QSX10 - Опрокидывающий момент0.142438060591663 (по умолчанию) | scalarОпрокидывающий момент, Mx, за счет вертикальной силы и развала, QSX10, безразмерный.
Mx due to B-factor of vertical force and camber, QSX11 - Опрокидывающий момент0.346766530036373 (по умолчанию) | scalarОпрокидывающий момент, Mx, за счет В-фактора вертикальной силы и развала, QSX11, безразмерный.
Mx due to squared camber, QSX12 - Опрокидывающий момент0 (по умолчанию) | scalarОпрокидывающий момент, Mx, из-за квадрата развала, QSX12, безразмерности.
Mx due to lateral force, QSX13 - Опрокидывающий момент0 (по умолчанию) | scalarОпрокидывающий момент, Mx, за счет поперечной силы, QSX13, безразмерный.
Mx due to lateral force with camber, QSX14 - Опрокидывающий момент0 (по умолчанию) | scalarОпрокидывающий момент, Mx, обусловленный поперечной силой с развалом, QSX14, безразмерностью.
Mx due to inflation pressure, PPMX1 - Опрокидывающий момент из-за давления0 (по умолчанию) | scalarОпрокидывающий момент, Mx, из-за инфляционного давления, PPMX1, безразмерный.
Cfy shape factor for lateral force, PCY1 - Коэффициент формы поперечной силы1.34299950037631 (по умолчанию) | scalarКоэффициент формы для поперечной силы, Cfy, PCY1, безразмерный.
Lateral friction muy, PDY1 - Боковое трение0.878267729082195 (по умолчанию) | scalarБоковое трение, мку, PDY1, безразмерное.
Lateral friction variation of muy with load, PDY2 - Изменение бокового трения-0.0644597923147385 (по умолчанию) | scalarИзменение бокового трения, мку, с нагрузкой, PDY2, безразмерность.
Lateral friction variation of muy with squared camber, PDY3 - Изменение бокового трения0 (по умолчанию) | scalarИзменение бокового трения, мку, с квадратом развала, PDY3, безразмерность.
Efy lateral curvature at nominal force FZNOM, PEY1 - Боковая кривизна при номинальном усилии-0.809776534470972 (по умолчанию) | scalarБоковая кривизна, Efy, при номинальном усилии, FZNOM, PEY1, безразмерная.
Efy curvature variation with load PEY2 - Изменение поперечной кривизны-0.600180598867198 (по умолчанию) | scalarБоковая кривизна, Efy, изменение с нагрузкой, PEY2, безразмерность.
Efy curvature constant camber dependency, PEY3 - Постоянная поперечная кривизна0.0991732552633487 (по умолчанию) | scalarБоковая кривизна, Efy, постоянная зависимость развала, PEY3, безразмерность.
Efy curvature variation with camber, PEY4 - Изменение поперечной кривизны-6.5577974035573 (по умолчанию) | scalarБоковая кривизна, Efy, изменение с развалом, PEY4, безразмерность.
Efy curvature variation with camber squared, PEY5 - Изменение поперечной кривизны0 (по умолчанию) | scalarБоковая кривизна, Efy, вариация с развалом в квадрате, PEY5, безразмерность.
Maximum KFy/FZNOM stiffness, PKY1 - Максимальная жесткость-15.5714726518315 (по умолчанию) | scalarМаксимальная жесткость поперечной силы, KFy, к номинальной силе, FZNOM, отношение, PKY1, безразмерность.
Load at maximum KFy/FZNOM stiffness, PKY2 - Нагрузка1.73126522291751 (по умолчанию) | scalarНагрузка при максимальной жесткости поперечной силы, KFy, к номинальной силе, FZNOM, отношение, PKY2, безразмерность.
KFy/FZNOM stiffness variation with camber, PKY3 - Изменение жесткости0.365349873517229 (по умолчанию) | scalarЖесткость поперечной силы, KFy, к номинальной силе, FZNOM, изменение жесткости с развалом, PKY3, безразмерность.
KFy curvature, PKY4 - Кривизна жесткости поперечной силы1.98176755955416 (по умолчанию) | scalarЖесткость поперечной силы, кривизна KFy, PKY4, безразмерность.
Variation of peak stiffness with squared camber, PKY5 - Изменение жесткости0 (по умолчанию) | scalarИзменение пиковой жесткости с брусковым изгибом, PKY5, безразмерным.
Fy camber stiffness factor, PKY6 - Коэффициент жесткости развала поперечной силы-0.884005199550313 (по умолчанию) | scalarБоковая сила, Fy, коэффициент жесткости развала, PKY6, безразмерность.
Camber stiffness vertical load dependency, PKY7 - Жесткость-0.237259727611847 (по умолчанию) | scalarЗависимость вертикальной нагрузки от жесткости развала, PKY7, безразмерность.
SHY horizontal shift at FZNOM, PHY1 - Горизонтальное смещение при номинальном усилии-0.00183370557235628 (по умолчанию) | scalarГоризонтальный сдвиг, SHY, при номинальном усилии, FZNOM, PHY1, безразмерный.
SHY variation with load, PHY2 - Изменение горизонтального сдвига0.00346401302716671 (по умолчанию) | scalarСмещение по горизонтали, SHY, изменение с нагрузкой, PHY2, безразмерность.
Svy/Fz vertical shift at FZNOM, PVY1 - Смещение по вертикали при номинальном усилии-0.00675427560163264 (по умолчанию) | scalarСмещение по вертикали, Svy, при номинальном усилии, FZNOM, PVY1, безразмерное.
Svy/Fz variation with load, PVY2 - Изменение вертикального сдвига с нагрузкой0.036379218103843 (по умолчанию) | scalarВертикальное смещение, Svy, изменение с нагрузкой, PVY2, безразмерное.
Svy/Fz variation with camber, PVY3 - Изменение вертикального сдвига с развалом-0.163543984089166 (по умолчанию) | scalarВертикальный сдвиг, Svy, вариация с развалом, PVY3, безразмерность.
Svy/Fz variation with load and camber, PVY4 - Изменение вертикального сдвига с нагрузкой и развалом-0.491003349625726 (по умолчанию) | scalarВертикальное смещение, Svy, изменение с нагрузкой и развалом, PVY4, безразмерное.
Cornering stiffness variation with inflation pressure, PPY1 - Изменение жесткости в зависимости от давления-0.62059646553185 (по умолчанию) | scalarИзменение жесткости при повороте с давлением накачки, PPY1, безразмерность.
Cornering stiffness variation with inflation pressure induced nominal load dependency, PPY2 - Изменение жесткости в зависимости от давления-0.0647824842338686 (по умолчанию) | scalarИзменение жесткости поворота с номинальной зависимостью нагрузки, вызванной давлением, PPY2, безразмерной.
Linear inflation pressure on peak lateral friction, PPY3 - Давление-0.164648843290686 (по умолчанию) | scalarЛинейное инфляционное давление на максимальное боковое трение, PPY3, безразмерное.
Quadratic inflation pressure on peak lateral friction, PPY4 - Давление0.283193909060098 (по умолчанию) | scalarКвадратное инфляционное давление на максимальное боковое трение, PPY4, безразмерное.
Inflation pressure effect on camber stiffness, PPY5 - Давление0 (по умолчанию) | scalarИнфляционное давление влияет на жесткость развала, PPY5, безразмерность.
Combined Fy reduction slope factor, RBY1 - Комбинированный коэффициент наклона уменьшения поперечной силы10.7588809173639 (по умолчанию) | scalarКомбинированная поперечная сила, Fy, коэффициент уклона понижения, RBY1, безразмерность.
Fy slope reduction with slip angle, RBY2 - Снижение уклона поперечной силы с углом скольжения7.70420065295029 (по умолчанию) | scalarПоперечная сила, Fy, уменьшение уклона с углом скольжения, RBY2, безразмерность.
Fy shift reduction with slip angle, RBY3 - Уменьшение смещения поперечной силы с углом скольжения3.40283755070691e-06 (по умолчанию) | scalarПоперечная сила, Fy, уменьшение сдвига с углом скольжения, RBY3, безразмерность.
Fy combined stiffness variation from camber, RBY4 - Комбинированное изменение жесткости поперечной силы от развала0 (по умолчанию) | scalarБоковая сила, Fy, комбинированное изменение жесткости от развала, RBY4, безразмерность.
Fy combined reduction shape factor, RCY1 - Коэффициент формы комбинированного уменьшения поперечной силы1.06691874059059 (по умолчанию) | scalarБоковая сила, Fy, коэффициент формы комбинированного редуцирования, RCY1, безразмерность.
Fy combined curvature factor, REY1 - Коэффициент суммарной кривизны поперечной силы0.308244924574305 (по умолчанию) | scalarБоковая сила, Fy, коэффициент комбинированной кривизны, REY1, безразмерность.
Fy combined curvature factor with load, REY2 - Коэффициент суммарной кривизны поперечной силы с нагрузкой7.48775032604508e-06 (по умолчанию) | scalarПоперечная сила, Fy, комбинированный коэффициент кривизны с нагрузкой, REY2, безразмерность.
Fy combined reduction shift factor, RHY1 - Коэффициент сдвига комбинированного уменьшения поперечной силы0.0118479204960415 (по умолчанию) | scalarБоковая сила, Fy, комбинированный понижающий коэффициент сдвига, RHY1, безразмерность.
Fy combined reduction shift factor with load, RHY2 - Коэффициент комбинированного понижающего сдвига поперечной силы с нагрузкой7.63650177161071e-06 (по умолчанию) | scalarБоковая сила, Fy, комбинированный понижающий коэффициент сдвига с нагрузкой, RHY2, безразмерность.
Slip ratio side force Svyk/Muy*Fz at FZNOM, RVY1 - Усилие скольжения коэффициента скольжения при номинальном усилии0.0560024425050078 (по умолчанию) | scalarБоковое усилие коэффициента скольжения при номинальном усилии, FZNOM, RVY1, безразмерное.
Side force Svyk/Muy*Fz variation with load, RVY2 - Изменение боковой силы с нагрузкой7.48487127056197e-06 (по умолчанию) | scalarИзменение боковой силы с нагрузкой, RVY2, безразмерность.
Side force Svyk/Muy*Fz variation with camber, RVY3 - Изменение боковой силы с развалом0 (по умолчанию) | scalarИзменение боковой силы с развалом, RVY3, безразмерностью.
Side force Svyk/Muy*Fz variation with slip angle, RVY4 - Изменение боковой силы с углом скольжения98.4047026517149 (по умолчанию) | scalarИзменение боковой силы с углом скольжения, RVY4, безразмерность.
Side force Svyk/Muy*Fz variation with slip ratio, RVY5 - Изменение боковой силы с коэффициентом проскальзывания2.02759273900054 (по умолчанию) | scalarИзменение боковой силы с коэффициентом скольжения, RVY5, безразмерность.
Side force Svyk/Muy*Fz variation with slip ratio arctangent, RVY6 - Изменение боковой силы с арктангенсом коэффициента скольжения15.7623064923347 (по умолчанию) | scalarИзменение боковой силы с коэффициентом скольжения arctangent, RVY6, безразмерный.
Torque resistance coefficient, QSY1 - Сопротивление крутящему моменту0.00699077564863536 (по умолчанию) | scalarКоэффициент сопротивления крутящему моменту, QSY1, безразмерный.
Torque resistance due to Fx, QSY2 - Сопротивление крутящему моменту от продольного усилия0 (по умолчанию) | scalarСопротивление крутящему моменту за счет продольной силы, Fx, QSY2, безразмерность.
Torque resistance due to speed, QSY3 - Сопротивление крутящему моменту из-за скорости0.00153535478298811 (по умолчанию) | scalarСопротивление крутящему моменту за счет скорости, QSY3, безразмерности.
Torque resistance due to speed^4, QSY4 - Сопротивление крутящему моменту из-за скорости8.55710322455322e-05 (по умолчанию) | scalarСопротивление крутящему моменту из-за скорости ^ 4, QSY4, безразмерность.
Torque resistance due to square of camber, QSY5 - Сопротивление крутящему моменту от развала0 (по умолчанию) | scalarСопротивление крутящему моменту благодаря квадрату развала, QSY5, безразмерности.
Torque resistance due to square of camber and load, QSY6 - Сопротивление крутящему моменту от развала и нагрузки0 (по умолчанию) | scalarСопротивление крутящему моменту от квадрата развала и нагрузки, QSY6, безразмерное.
Torque resistance due to load, QSY7 - Сопротивление крутящему моменту от нагрузки0.89443879773793 (по умолчанию) | scalarСопротивление крутящему моменту от нагрузки, QSY7, безразмерность.
Torque resistance due to pressure, QSY8 - Сопротивление крутящему моменту из-за давления-0.403227641260894 (по умолчанию) | scalarСопротивление крутящему моменту из-за давления, QSY8, безразмерности.
Trail slope factor for trail Bpt at FZNOM, QBZ1 - Коэффициент наклона тропы при номинальном усилии11.666656027484 (по умолчанию) | scalarКоэффициент наклона трассы Bpt при номинальной силе, FZNOM, QBZ1, безразмерный.
Bpt slope variation with load, QBZ2 - Изменение уклона с нагрузкой-1.30355438574485 (по умолчанию) | scalarИзменение уклона с нагрузкой, QBZ2, безразмерность.
Bpt slope variation with square of load, QBZ3 - Изменение уклона с нагрузкой0 (по умолчанию) | scalarИзменение уклона с квадратом нагрузки, QBZ3, безразмерность.
Bpt slope variation with camber, QBZ4 - Изменение уклона с развалом0.177918305399071 (по умолчанию) | scalarИзменение уклона с развалом, QBZ4, безразмерностью.
Bpt slope variation with absolute value of camber, QBZ5 - Изменение уклона с развалом-0.162481135068033 (по умолчанию) | scalarИзменение уклона с абсолютным значением развала, QBZ5, безразмерность.
Bpt slope variation with square of camber, QBZ6 - Изменение уклона с развалом0 (по умолчанию) | scalarИзменение уклона с квадратом развала, QBZ6, безразмерность.
Br of Mzr slope scaling factor, QBZ9 - Коэффициент масштабирования уклона30.1445534682089 (по умолчанию) | scalarМасштабный коэффициент уклона, QBZ9, безразмерный.
Br of Mzr cornering stiffness factor, QBZ10 - Коэффициент жесткости при повороте0 (по умолчанию) | scalarBr коэффициента жесткости поворота Mzr, QBZ10, безразмерный.
Cpt pneumatic trail shape factor, QCZ1 - Коэффициент формы пневматического следа1.29026978207574 (по умолчанию) | scalarКоэффициент формы пневматического следа, Cpt, QCZ1, безразмерный.
Dpt peak trail, QDZ1 - Пиковая тропа0.0886972644991399 (по умолчанию) | scalarПиковый след, Dpt, QDZ1, безразмерный.
Dpt peak trail variation with load, QDZ2 - Изменение пикового тракта с нагрузкой-0.0058634820161856 (по умолчанию) | scalarПиковый след, Dpt, вариация с нагрузкой, QDZ2, безразмерность.
Dpt peak trail variation with camber, QDZ3 - Изменение пиковой трассы с развалом0.3805597481383 (по умолчанию) | scalarПиковый след, Dpt, вариация с развалом, QDZ3, безразмерность.
Dpt peak trail variation with square of camber, QDZ4 - Изменение пиковой трассы с развалом0 (по умолчанию) | scalarПиковый след, Dpt, вариация с квадратом развала, QDZ4, безразмерность.
Dmr peak residual torque, QDZ6 - Пиковый остаточный крутящий момент0.00160914918118959 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, QDZ6, безразмерный.
Dmr peak residual torque variation with load, QDZ7 - Пиковое изменение остаточного крутящего момента с нагрузкой-0.00211036330862154 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с нагрузкой, QDZ7, безразмерность.
Dmr peak residual torque variation with camber, QDZ8 - Пиковое изменение остаточного крутящего момента с развалом-0.13921904912557 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с развалом, QDZ8, безразмерность.
Dmr peak residual torque variation with camber and load, QDZ9 - Пиковое изменение остаточного крутящего момента с развалом и нагрузкой0.00816585550028243 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с развалом и нагрузкой, QDZ9, безразмерный.
Dmr peak residual torque variation with square of camber, QDZ10 - Пиковое изменение остаточного крутящего момента с развалом0 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с квадратом развала, QDZ10, безразмерный.
Dmr peak residual torque variation with square of load, QDZ11 - Пиковое изменение остаточного крутящего момента с нагрузкой0 (по умолчанию) | scalarПиковый остаточный крутящий момент, Dmr, изменение с квадратом нагрузки, QDZ11, безразмерный.
Ept trail curvature at FZNOM, QEZ1 - Кривизна тропы при номинальном усилии-2.19802254534746 (по умолчанию) | scalarКривизна тропы, Ept, при номинальной силе, FZNOM, QEZ1, безразмерная.
Ept variation with load, QEZ2 - Изменение кривизны тропы с нагрузкой1.01850535789165 (по умолчанию) | scalarКривизна тропы, изменение Эпт с нагрузкой, QEZ2, безразмерность.
Ept variation with square of load, QEZ3 - Изменение кривизны тропы с нагрузкой0 (по умолчанию) | scalarКривизна тропы, изменение Эпта с квадратом нагрузки, QEZ3, безразмерность.
Ept variation with sign of alpha-t, QEZ4 - Изменение кривизны тропы0.278379679112054 (по умолчанию) | scalarКривизна следа, изменение Эпта со знаком альфа-t, QEZ4, безразмерность.
Ept variation with sign of alpha-t and camber, QEZ5 - Изменение-0.548414722765386 (по умолчанию) | scalarКривизна следа, изменение Эпта со знаком альфа-t и развала, QEZ5, безразмерность.
Sht horizontal trail shift at FZNOM, QHZ1 - Смещение горизонтального следа при номинальной нагрузке0.00148361198869669 (по умолчанию) | scalarСдвиг горизонтального следа, Sht, при номинальной нагрузке, FZNOM, QHZ1, безразмерный.
Sht variation with load, QHZ2 - Изменение смещения горизонтального следа с нагрузкой0.00202017567585904 (по умолчанию) | scalarСмещение по горизонтали, Sht, изменение с нагрузкой, QHZ2, безразмерность.
Sht variation with camber, QHZ3 - Изменение смещения горизонтального следа с развалом0.240316641332066 (по умолчанию) | scalarСдвиг горизонтального следа, Sht, вариация с развалом, QHZ3, безразмерность.
Sht variation with load and camber, QHZ4 - Изменение смещения горизонтального следа с нагрузкой и развалом-0.210114035738085 (по умолчанию) | scalarСдвиг горизонтального следа, Sht, вариация с нагрузкой и развалом, QHZ4, безразмерность.
Inflation pressure influence on trail length, PPZ1 - Влияние давления на длину тракта-0.443927982388615 (по умолчанию) | scalarИнфляционное давление влияет на длину тропы, PPZ1, безразмерность.
Inflation pressure influence on residual aligning torque, PPZ2 - Влияние давления на центрирующий момент0 (по умолчанию) | scalarДавление инфляции влияет на остаточном крутящем моменте выравнивания, PPZ2, безразмерном.
Nominal value of s/R0: effect of Fx on Mz, SSZ1 - Влияние продольной силы на центрирующий момент0.00914999585397887 (по умолчанию) | scalarНоминальное значение s/R0: влияние продольной силы, Fx, на центрирующий крутящий момент, Mz, SSZ1, безразмерность.
s/R0 variation with lateral to nominal force ratio, SSZ2 - Изменение с отношением поперечной силы к номинальной0.0389830656052735 (по умолчанию) | scalarИзменение с отношением поперечной силы к номинальной, SSZ2, безразмерное.
s/R0 variation with camber, SSZ3 - Вариация с развалом0 (по умолчанию) | scalarВариация с развалом, SSZ3, безразмерностью.
s/R0 variation with camber and load, SSZ4 - Изменение с развалом и нагрузкой0 (по умолчанию) | scalarВариация с развалом и нагрузкой, SSZ4, безразмерность.
Fx peak reduction due to spin, PDXP1 - Уменьшение пика продольной силы из-за вращения0.396718274678791 (по умолчанию) | scalarПродольная сила, Fx, пиковое уменьшение за счет вращения, PDXP1, безразмерность.
Fx peak reduction due to spin with varying load, PDXP2 - Уменьшение пика продольной силы из-за вращения0 (по умолчанию) | scalarПродольная сила, Fx, пиковое уменьшение за счет вращения с изменяющейся нагрузкой, PDXP2, безразмерность.
Fx peak reduction due to spin with slip ratio, PDXP3 - Уменьшение пика продольной силы из-за вращения0 (по умолчанию) | scalarПродольная сила, Fx, пиковое уменьшение за счет вращения с коэффициентом скольжения, PDXP3, безразмерность.
Cornering stiffness reduction due to spin, PKYP1 - Снижение жесткости из-за вращения1.00587060633573 (по умолчанию) | scalarСнижение жесткости поворота за счет вращения, PKYP1, безразмерности.
Fy peak reduction due to spin, PDYP1 - Уменьшение пика поперечной силы из-за вращения0.40483048923438 (по умолчанию) | scalarБоковая сила, Fy, пиковое уменьшение за счет вращения, PDYP1, безразмерность.
Fy peak reduction due to spin with varying load, PDYP2 - Уменьшение пика поперечной силы из-за вращения0 (по умолчанию) | scalarБоковая сила, Fy, уменьшение пика за счет вращения с изменяющейся нагрузкой, PDYP2, безразмерность.
Fy peak reduction due to spin with slip angle, PDYP3 - Уменьшение пика поперечной силы из-за вращения0 (по умолчанию) | scalarБоковая сила, Fy, уменьшение пика за счет вращения с углом скольжения, PDYP3, безразмерность.
Fy peak reduction due to square root of spin, PDYP4 - Уменьшение пика поперечной силы из-за вращения0 (по умолчанию) | scalarБоковая сила, Fy, уменьшение пика из-за квадратного корня вращения, PDYP4, безразмерность.
Fy vs. slip angle response lateral shift limit, PHYP1 - Зависимость поперечной силы от угла скольжения0.992731942067188 (по умолчанию) | scalarБоковая сила, Fy, в зависимости от угла скольжения, предел бокового сдвига, PHYP1, безразмерный.
Fy vs. slip angle response max lateral shift limit, PHYP2 - Зависимость поперечной силы от угла скольжения0.150352945499914 (по умолчанию) | scalarБоковая сила, Fy, по сравнению с откликом угла скольжения макс. предел бокового сдвига, PHYP2, безразмерный.
Fy vs. slip angle response max lateral shift limit with load, PHYP3 - Зависимость поперечной силы от угла скольжения0 (по умолчанию) | scalarБоковая сила, Fy, и отклик угла скольжения макс. предел бокового сдвига с нагрузкой, PHYP3, безразмерность.
Fy vs. slip angle response lateral shift curvature factor, PHYP4 - Зависимость поперечной силы от угла скольжения-3.98988682633674 (по умолчанию) | scalarБоковая сила, Fy, в зависимости от угла скольжения отклик коэффициент кривизны бокового сдвига, PHYP4, безразмерный.
Camber stiffness reduction due to spin, PECP1 - Уменьшение жесткости развала0.502379254513503 (по умолчанию) | scalarУменьшение жесткости развала за счет вращения, PECP1, безразмерности.
Camber stiffness reduction due to spin with load, PECP2 - Уменьшение жесткости развала0 (по умолчанию) | scalarУменьшение жесткости развала за счет вращения с нагрузкой, PECP2, безразмерность.
Turn slip pneumatic trail reduction factor, QDTP1 - Коэффициент уменьшения проскальзывания пневматического следа10.0178654287947 (по умолчанию) | scalarПоворачивайте пневматический коэффициент обжатия следа, QDTP1, безразмерный.
Turn moment for constant turning and zero longitudinal speed, QCRP1 - Момент поворота для постоянного поворота0.200627747200702 (по умолчанию) | scalarМомент поворота для постоянного превращения и нулевой продольной скорости, QCRP1, безразмерного.
Turn slip moment increase with spin at 90deg slip angle, QCRP2 - Поворотный скользящий момент0.0995735881599772 (по умолчанию) | scalarМомент проскальзывания увеличивается при вращении под углом 90 градусов, QCRP2, безразмерно.
Residual spin torque reduction from side slip, QBRP1 - Остаточное снижение крутящего момента0.0997107127960717 (по умолчанию) | scalarОстаточное уменьшение крутящего момента вращения от бокового проскальзывания, QBRP1, безразмерное.
Turn slip moment peak magnitude, QDRP1 - Пиковая величина момента проскальзывания поворота1.01432910167423 (по умолчанию) | scalarВеличина пика момента проскальзывания поворота, QDRP1, безразмерность.
Turn slip moment curvature, QDRP2 - Поворот кривизны скользящего момента0 (по умолчанию) | scalarПоворот изгиба скользящего момента, QDRP2, безразмерность.
[1] Бесселинк, И. Дж., М., А. Дж. С. Шмейц и Х. Б. Пацейка. «Усовершенствованная модель шин Magic Formula/Swift, которая может обрабатывать изменения давления накачки». Динамика системы транспортных средств - Международный журнал механики и мобильности транспортных средств. Том 48, 2010. дои: 10,1080/ 00423111003748088.
[2] Pacejka, H.B. Tire and Vehicle Dynamics. 3-й ред. Оксфорд, Великобритания: SAE and Butterworth-Heinemann, 2012.
[3] Шмид, Стивен Р., Бернард Дж. Хамрок и Бо О. Якобсон. «Глава 18: Тормоза и сцепления». Основы элементов машины, версия SI. 3-я ред. Бока Ратон, ФЛ: КПР Пресс, 2014.
[1] Переиздано с разрешения © 2008 SAE International. Дальнейшее распространение этого материала не допускается без предварительного разрешения SAE.
