Колесо Fiala 2DOF колесо с диском, барабаном или реперным тормозом
Блоксеть/колеса и шины Vehicle Dynamics
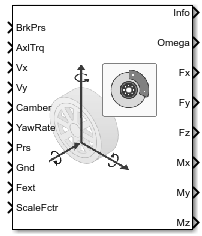
Блок Fiala Wheel 2DOF реализует упрощенную шину с возможностью бокового и продольного скольжения на основе модели E. Fiala [1]. Блок использует модель поступательного трения для вычисления сил и моментов во время комбинированного продольного и бокового проскальзывания, требуя меньше параметров, чем блок 2DOF комбинированного проскальзывающего колеса. Если у вас нет коэффициентов шин, необходимых для магической формулы, рассмотрите возможность использования этого блока для исследований, которые не включают обширное нелинейное комбинированное боковое скольжение или боковую динамику. Если исследование требует нелинейного комбинированного проскальзывания или поперечной динамики, рассмотрите возможность использования блока 2DOF комбинированного проскальзывания.
Блок определяет скорость вращения колеса, вертикальное движение, силы и моменты во всех шести степенях свободы (DOF) на основе крутящего момента трансмиссии, тормозного давления, высоты дороги, угла развала колеса и давления накачки. Этот блок можно использовать для следующих типов анализов:
Моделирование трансмиссии и транспортного средства, требующее низкочастотных усилий от шины к дороге и торможения для расчета ускорения, торможения и сопротивления качению колеса с минимальными параметрами шины.
Взаимодействие колес с идеализированным дорожным покрытием.
Маневры езды и обращения для транспортных средств, подвергающихся легкому комбинированному скольжению. Для этого анализа можно подключить блок к трансмиссии и компонентам шасси, таким как дифференциалы, подвеска и системы кузова транспортного средства.
Стабильность рыскания. Для этого анализа можно подключить этот блок к более подробным моделям тормозных систем.
Жесткость шины и неподрессоренное взаимодействие массы с изменениями грунта, переносом нагрузки или движением шасси с использованием вертикальной степени свободы блока.
Блок объединяет модели вращательного колеса, вертикальной массы и динамики торможения. Для зависимых от скольжения сил и моментов шины блок реализует модель шины Fiala.
Используйте параметр «Тип тормоза» для выбора тормоза.
| Цель | Настройка типа тормоза |
|---|---|
Без торможения |
|
Реализовать тормоз, преобразующий давление тормозного цилиндра в тормозное усилие |
|
Реализовать симплексный барабанный тормоз, преобразующий приложенную силу и геометрию тормоза в чистый тормозной момент |
|
Реализовать таблицу поиска, которая является функцией скорости колеса и приложенного тормозного давления |
|
Чтобы рассчитать крутящий момент сопротивления качению, задайте один из этих параметров сопротивления качению.
| Настройка | Блокирование реализации |
|---|---|
| Ничего |
| Метод в методологии ступенчатого выбега для измерения сопротивления качению шины. Сопротивление качению является функцией давления в шине, нормальной силы и скорости. |
| Метод, указанный в ISO 28580:2018, Метод измерения сопротивления качению легковых автомобилей, грузовых автомобилей и шин - Испытание в одной точке и корреляция результатов измерений. |
| Уравнения магических формул из 4.E70 в Tire и Vehicle Dynamics. Магическая формула - эмпирическое уравнение, основанное на коэффициентах подгонки. |
| Таблица поиска, которая является функцией продольной скорости нормальной силы и оси вращения. |
Чтобы рассчитать вертикальное движение, задайте один из этих параметров.
| Настройка | Блокирование реализации |
|---|---|
| Блок передает приложенные усилия шасси непосредственно на расчеты сопротивления качению и продольной силы. |
| Вертикальное движение зависит от жесткости и демпфирования колеса. Жесткость является функцией смещения боковой стенки шины и давления. Демпфирование является функцией скорости и давления боковой стенки шины. |
Блок вычисляет инерционный отклик колеса в зависимости от:
Потери оси
Крутящий момент тормоза и привода
Сопротивление качению шины
Контакт с землей через интерфейс шины-дорога
Входной крутящий момент представляет собой сумму приложенного крутящего момента оси, тормозного момента и момента, возникающего из комбинированного крутящего момента шины.
Tb + Td
На момент, возникающий от комбинированного крутящего момента шины, блок реализует тяговые силы колес и сопротивление качению с динамикой первого порядка. Сопротивление качению имеет постоянную времени, параметризованную в терминах длины релаксации.
Fx Re + My)
Для расчета крутящего момента сопротивления качению можно задать один из этих параметров сопротивления качению.
| Настройка | Блокирование реализации |
|---|---|
| Блок задает сопротивление качению, |
| Блок использует метод, описанный в методе SAE Stepwise Coastdown Methody для измерения сопротивления качению шин. Сопротивление качению является функцией давления в шине, нормальной силы и скорости. В частности, tanh (4Vx)
|
| Блок использует метод, указанный в ISO 28580:2018, Метод измерения сопротивления качению легковых автомобилей, грузовых автомобилей и шин - Испытание в одной точке и корреляция результатов измерений. Метод учитывает нормальную нагрузку, паразитные потери и тепловые поправки от условий испытания. В частности, Fpl) tanh (λ) |
| Блок вычисляет сопротивление качению, |
| Для сопротивления качению, |
Если тормоза включены, блок определяет заблокированное или разблокированное состояние торможения на основе идеализированной модели трения сухого сцепления. Основываясь на состоянии блокировки, блок реализует эти модели трения и динамические модели.
| Если | Условие блокировки | Модель трения | Динамическая модель |
|---|---|---|---|
Незапертый | − Ri3) 3 (Ro2 − Ri2) | ||
Запертый | Ts |
Уравнения используют эти переменные.
| ω | Угловая скорость колеса |
| a | Компонент силы, не зависящий от скорости |
| b | Компонент силы линейной скорости |
| c | Компонент силы квадратичной скорости |
| Le | Длина релаксации шины |
| J | Момент инерции |
| Мой | Крутящий момент сопротивления качению |
| Ta | Приложенный крутящий момент на оси |
| TB | Тормозной момент |
| Td | Комбинированный крутящий момент шины |
| Tf | Момент трения |
| Ti | Чистый входной крутящий момент |
| Tk | Кинетический момент трения |
| Кому | Чистый выходной крутящий момент |
| Ts | Статический фрикционный момент |
| ФК | Приложенное усилие сцепления |
| Fx | Продольное усилие, создаваемое дорожным покрытием шины из-за проскальзывания |
| Reff | Эффективный радиус сцепления |
| Ro | Внешний радиус кольцевого диска |
| Ri | Внутренний радиус кольцевого диска |
| Ре | Эффективный радиус шины при нагрузке и при заданном давлении |
| Vx | Скорость продольной оси |
| Fz | Нормальная сила транспортного средства |
| Cr | Постоянное сопротивление качению |
| Tamb | Температура окружающей среды |
| Tmeas | Измеренная температура для постоянной сопротивления качению |
| Fpl | Паразитная потеря силы |
| Kt | Коэффициент термокоррекции |
| ɑ | Показатель давления в шинах |
| β | Показатель нормальной силы |
| пи | Давление в шинах |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
Блок реализует продольную силу как функцию проскальзывания колеса относительно поверхности дороги с использованием этих уравнений.
| Вычисление | Уравнение |
|---|---|
Критическое проскальзывание | мкФз2Сц | |
Продольная сила | |
Коэффициент трения | λ kα) |
Коэффициент проскальзывания | tan2 (α ') |
Уравнения используют эти переменные.
| κ' | Состояние проскальзывания |
| Fx | Продольное усилие, действующее на ось вдоль оси Х, закрепленной на шине, |
| Cκ | Продольная жесткость |
| Fz | Вертикальная контактная накладка с нормальным усилием вдоль оси Z, закрепленной в шине, |
| μ | Коэффициент трения |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
| κka | Комплексный коэффициент проскальзывания |
| α' | Состояние угла скольжения |
| λμ | Фрикционное масштабирование |
Блок реализует боковую силу как функцию от состояния угла скольжения колеса, используя эти уравнения.
| Вычисление | Уравнение |
|---|---|
Критический угол скольжения | 3 мкм' Fz 'Ca) |
Боковая сила |
Уравнения используют эти переменные.
| α' | Состояние угла скольжения |
| Финансовый год | Боковое усилие, действующее на ось вдоль оси y, закрепленной в шине, |
| Fz | Вертикальная контактная накладка с нормальным усилием вдоль оси Z, закрепленной в шине |
| C ɣ | Жесткость развала |
| Cα | Поперечная жесткость на угол скольжения |
| μ | Коэффициент трения |
Для вертикальной динамики блок реализует эти уравнения.
| Вычисление | Уравнение |
|---|---|
Вертикальная реакция | мг − Fz |
Нормальная сила шины | |
Отклонение вертикальной боковой стенки |
Уравнения используют эти переменные.
| z | Отклонение шины вдоль оси Z, закрепленной на шине |
| zgnd | Перемещение грунта вдоль оси Z, закрепленной в шине |
| Fztire | Нормальная сила шины вдоль оси Z, закрепленной на шине |
| Fz | Вертикальная сила, действующая на ось вдоль оси Z, закрепленной в шине |
| ρz | Отклонение вертикальной боковой стенки вдоль оси Z, закрепленной на шине |
| k | Жесткость вертикальной боковой стенки |
| b | Демпфирование вертикальной боковой стенки |
В этой таблице приводится сводная информация о реализации опрокидывания, выравнивания и масштабирования.
| Вычисление | Внедрение |
|---|---|
Опрокидывающий момент | Модель Фиала не определяет момент опрокидывания. Блок реализует это уравнение, требуя минимальные параметры. (γ) |
Выравнивающий момент | Блок реализует выравнивающий момент как комбинацию демпфирования скорости рыскания и состояния угла скольжения. |
Фрикционное масштабирование | Для изменения коэффициента трения используйте |
Уравнения используют эти переменные.
| Mx | ОПРОКИДЫВАЮЩИЙ МОМЕНТ, ВОЗДЕЙСТВУЮЩИЙ НА ОСЬ ВОКРУГ ОСИ Х ШИНЫ |
| Mz | Выравнивающий момент, воздействующий на ось вокруг оси Z, закрепленной на шине |
| Ре | Эффективная контактная накладка на радиальное расстояние носителя колеса |
| ɣ | Угол развала |
| k | Жесткость вертикальной боковой стенки |
| b | Демпфирование вертикальной боковой стенки |
Угловая скорость шины вокруг оси z (скорость рыскания) | |
| w | Ширина шины |
| α' | Состояние угла скольжения |
| bMz | Линейное сопротивление скорости рыскания |
| Финансовый год | Боковое усилие, действующее на ось вдоль оси Y, закрепленной в шине |
| C ɣ | Жесткость развала |
| Cα | Поперечная жесткость на угол скольжения |
| μ | Коэффициент трения |
| Fz | Вертикальная контактная накладка с нормальным усилием вдоль оси Z, закрепленной в шине |
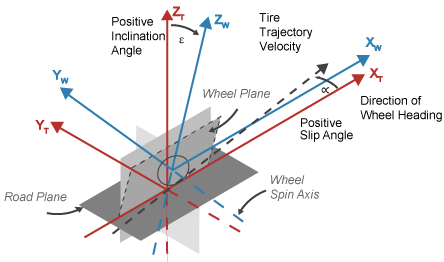
Для разрешения сил и моментов блок использует ориентацию Z-Up систем координат шины и колеса.
Оси системы координат шины (XT, YT, ZT) закреплены в опорной раме, прикрепленной к шине. Начало координат находится в контакте шины с землей.
Оси системы координат колеса (XW, YW, ZW) фиксируются в опорной раме, прикрепленной к колесу. Начало координат находится в центре колеса.
Ориентация Z-Up [1 ]
Если задан параметр «Тип тормоза» Discблок реализует дисковый тормоз. На этом рисунке показаны вид сбоку и спереди дискового тормоза.
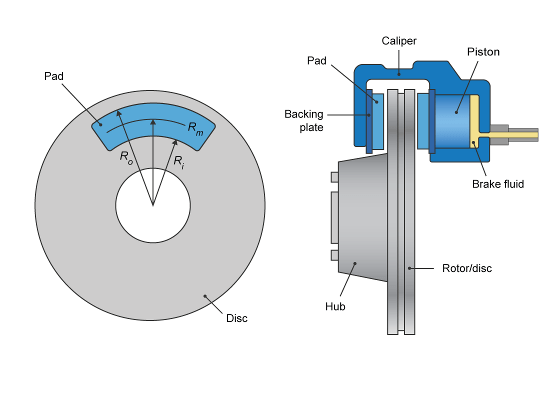
Дисковый тормоз преобразует давление в тормозном цилиндре в силу. Дисковый тормоз прикладывает усилие к среднему радиусу тормозной колодки.
Блок использует эти уравнения для вычисления тормозного момента дискового тормоза.
Ri2
Уравнения используют эти переменные.
| T | Тормозной момент |
| P | Приложенное тормозное давление |
| N | Скорость колеса |
| Npads | Количество тормозных колодок в узле дискового тормоза |
| μstatic | Коэффициент статического трения дисковой площадки-ротора |
| μ | Коэффициент кинетического трения дисковой площадки-ротора |
| Ba | Диаметр отверстия тормозного привода |
| Комната | Средний радиус приложения усилия тормозной колодки к тормозному ротору |
| Ro | Внешний радиус тормозной колодки |
| Ri | Внутренний радиус тормозной колодки |
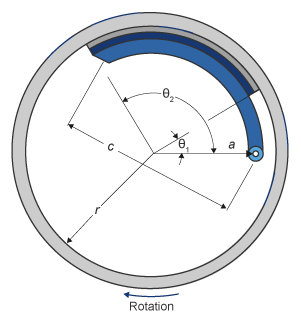
Если задан параметр «Тип тормоза» Drumблок реализует статический (стационарный) симплексный барабанный тормоз. Симплексный барабанный тормоз состоит из одного двустороннего гидропривода и двух тормозных колодок. Тормозные колодки не имеют общего шарнирного пальца.
Симплексная модель барабанного тормоза использует приложенную силу и геометрию тормоза для расчета чистого крутящего момента для каждой тормозной колодки. Модель барабана предполагает, что приводы и геометрия колодки симметричны для обеих сторон, позволяя использовать единый набор параметров геометрии и трения для обеих колодок.
Блок реализует уравнения, полученные из этих уравнений в основах элементов машины.
Уравнения используют эти переменные.
| T | Тормозной момент |
| P | Приложенное тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент статического трения дисковой площадки-ротора |
| μ | Коэффициент кинетического трения дисковой площадки-ротора |
| Trshoe | Тормозной момент правой колодки |
| Tlshoe | Тормозной момент левой колодки |
| a | Расстояние от центра барабана до центра оси шарнира колодки |
| c | Расстояние от центра оси шарнира колодки до соединения тормозного привода на тормозной колодке |
| r | Внутренний радиус барабана |
| Ba | Диаметр отверстия тормозного привода |
| Θ1 | Угол от центра оси шарнира колодки до начала материала тормозной колодки на колодке |
| Θ2 | Угол от центра оси шарнира колодки до конца материала тормозной колодки на колодке |
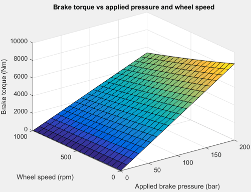
Если задан параметр «Тип тормоза» Mappedблок использует таблицу поиска для определения тормозного момента.
Уравнения используют эти переменные.
| T | Тормозной момент |
| N) | Таблица поиска тормозного момента |
| P | Приложенное тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент трения поверхности поверхности контакта барабана в статических условиях |
| μ | Коэффициент трения поверхности раздела диск-подушка-ротор |
Справочная таблица для тормозного момента, N), является функцией приложенного тормозного давления и скорости колеса, где:
T - тормозной момент в Н· м.
Р - давление торможения, в бар.
N - частота вращения колеса, в об/мин.
Brake Type - Выберите типNone | Disc | Drum | MappedИспользуйте параметр «Тип тормоза» для выбора тормоза.
| Цель | Настройка типа тормоза |
|---|---|
Без торможения |
|
Реализовать тормоз, преобразующий давление тормозного цилиндра в тормозное усилие |
|
Реализовать симплексный барабанный тормоз, преобразующий приложенную силу и геометрию тормоза в чистый тормозной момент |
|
Реализовать таблицу поиска, которая является функцией скорости колеса и приложенного тормозного давления |
|
Rolling Resistance - Выберите типNone (по умолчанию) | Pressure and velocity | ISO 28580 | Magic Formula | Mapped torqueЧтобы рассчитать крутящий момент сопротивления качению, задайте один из этих параметров сопротивления качению.
| Настройка | Блокирование реализации |
|---|---|
| Ничего |
| Метод в методологии ступенчатого выбега для измерения сопротивления качению шины. Сопротивление качению является функцией давления в шине, нормальной силы и скорости. |
| Метод, указанный в ISO 28580:2018, Метод измерения сопротивления качению легковых автомобилей, грузовых автомобилей и шин - Испытание в одной точке и корреляция результатов измерений. |
| Уравнения магических формул из 4.E70 в Tire и Vehicle Dynamics. Магическая формула - эмпирическое уравнение, основанное на коэффициентах подгонки. |
| Таблица поиска, которая является функцией продольной скорости нормальной силы и оси вращения. |
| Выбор | Параметры |
|---|---|
| Коэффициент силы, независимый от скорости, aMy Компонент силы линейной скорости, bMy Компонент силы квадратичной скорости, cMy Показатель давления в шинах, alphaMy Показатель нормальной силы, betaMy |
| Сила паразитных потерь, Fpl Постоянная сопротивления качению, Cr Коэффициент термокоррекции, Кт Измеренная температура, Tmeas Сила паразитных потерь, Fpl Температура окружающей среды, Tamb |
| Коэффициент крутящего момента сопротивления качению, QSY Коэффициент сопротивления качению продольной силой, QSY2 Коэффициент сопротивления качению с линейной скоростью вращения, QSY3 Коэффициент сопротивления качению при скорости вращения в квадрате, QSY4 Крутящий момент сопротивления качению в квадрате, QSY5 Крутящий момент сопротивления качению в квадрате развала на основе нагрузки, QSY6 Нормальный коэффициент сопротивления качению под нагрузкой, QSY7 Коэффициент сопротивления качению под давлением, QSY8 Коэффициент масштабирования сопротивления качению, lam_My |
| Точки останова скорости по оси вращения, VxMy Нормальные силовые точки останова, FzMy Карта крутящего момента сопротивления качению, MyMap |
Vertical Motion - Выберите типNone (по умолчанию) | Mapped stiffness and dampingЧтобы рассчитать вертикальное движение, задайте один из этих параметров.
| Настройка | Блокирование реализации |
|---|---|
| Блок передает приложенные усилия шасси непосредственно на расчеты сопротивления качению и продольной силы. |
| Вертикальное движение зависит от жесткости и демпфирования колеса. Жесткость является функцией смещения боковой стенки шины и давления. Демпфирование является функцией скорости и давления боковой стенки шины. |
| Выбор | Включает эти параметры |
|---|---|
| Масса колеса, МАССА Начальное перемещение шины, zo Начальная скорость, zdoto Начальная вертикальная скорость колеса (неподвижная рама колеса), zdoto Точки останова вертикального отклонения, zFz Точки останова давления, pFz Сила из-за отклонения, Fzz Точки останова вертикальной скорости, zdotFz Сила из-за скорости, Fzzdot |
Longitudinal stiffness, Ckappa - Продольная жесткость1e7 (по умолчанию) | scalarПродольная жесткость, Кн, в Н.
Lateral stiffness per slip angle, Calpha - Поперечная жесткость4.5e4 (по умолчанию) | scalarПоперечная жесткость на угол скольжения, Cα, в Н/рад.
Camber stiffness, Cgamma - Жесткость развала1e3 (по умолчанию) | scalarЖесткость развала, Cɣ, в Н/рад.
Kinematic friction, muMin - Трение.8 (по умолчанию) | scalarКинематическое трение, мкк, безразмерное.
Static friction, muMax - Трение1 (по умолчанию) | scalarСтатическое трение, мкс, безразмерное.
Longitudinal relaxation length, Lrelx - Длина.05 (по умолчанию) | scalarДлина продольной релаксации, Lrex, в м.
Lateral relaxation length, Lrely - Длина.15 (по умолчанию) | scalarДлина боковой релаксации, Lrely, в м/рад.
Rotational damping, br - Демпфирование1e-3 (по умолчанию) | scalarРотационное демпфирование, br, в Н· м· с/рад.
Rotational inertia (rolling axis), IYY - Инерция0.74 (по умолчанию) | scalarИнерция вращения (ось качения), IYY, в кг· м ^ 2.
Initial rotational velocity, omegao - Скорость0 (по умолчанию) | scalarНачальная скорость вращения, в рад/с.
Unloaded radius, UNLOADED_RADIUS - Радиус0.309384029954441 (по умолчанию) | scalarНезагруженный радиус, в м.
Velocity independent force coefficient, aMy - Коэффициент силы8e-4 (по умолчанию) | scalarКоэффициент силы, не зависящий от скорости, а, в с/м.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Linear velocity force component, bMy - Компонент силы.001 (по умолчанию) | scalarКомпонент силы линейной скорости, b, в с/м.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Quadratic velocity force component, cMy - Компонент силы1.6e-4 (по умолчанию) | scalarКомпонент силы квадратичной скорости, c, в с ^ 2/м ^ 2.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Tire pressure exponent, alphaMy - Показатель давления-0.003 (по умолчанию) | scalarПоказатель давления в шинах, ɑ, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Normal force exponent, betaMy - Показатель силы0.97 (по умолчанию) | scalarНормальная экспонента силы, β, безразмерность.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Parasitic losses force, Fpl - Потеря силы10 (по умолчанию) | scalarПаразитная потеря силы, Fpl, у N.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Rolling resistance constant, Cr - Константа1e-3 (по умолчанию) | scalarПостоянная сопротивления качению, Cr, в Н/кН. ISO 28580 определяет единицу сопротивления качению как один ньютон тягового сопротивления для каждого килоньютона нормальной нагрузки.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Thermal correction factor, Kt - Поправочный коэффициент.008 (по умолчанию) | scalarКоэффициент термокоррекции, Kt, в 1/degC.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Measured temperature, Tmeas - Температура298.15 (по умолчанию) | scalarИзмеренная температура, Tmeas, в К.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Ambient temperature, Tamb - Температура298.15 (по умолчанию) | scalarИзмеренная температура, Tamb, в К.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Input ambient temperature - Выборoff (по умолчанию) | onВыберите для создания входного порта Tamb.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Rolling resistance torque coefficient, QSY1 - Коэффициент крутящего момента0.007 (по умолчанию) | scalarКоэффициент крутящего момента сопротивления качению безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Longitudinal force rolling resistance coefficient, QSY2 - Коэффициент сопротивления усилия0 (по умолчанию) | scalarКоэффициент сопротивления качению продольной силы, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Linear rotational speed rolling resistance coefficient, QSY3 - Коэффициент линейной скорости0.0015 (по умолчанию) | scalarКоэффициент сопротивления качению с линейной скоростью вращения, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Quartic rotational speed rolling resistance coefficient, QSY4 - Коэффициент квартической скорости8.5e-05 (по умолчанию) | scalarКоэффициент сопротивления качению с квартальной скоростью вращения, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Camber squared rolling resistance torque, QSY5 - Крутящий момент сопротивления развала0 (по умолчанию) | scalarВращающий момент сопротивления качению в квадрате, в 1/рад ^ 2.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Load based camber squared rolling resistance torque, QSY6 - Крутящий момент сопротивления нагрузке0 (по умолчанию) | scalarКрутящий момент сопротивления качению в квадрате развала на основе нагрузки, в 1/рад ^ 2.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Normal load rolling resistance coefficient, QSY7 - Нормальный коэффициент сопротивления0.9 (по умолчанию) | scalarНормальный коэффициент сопротивления качению при нагрузке, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Pressure load rolling resistance coefficient, QSY8 - Коэффициент сопротивления давлению-0.4 (по умолчанию) | scalarКоэффициент сопротивления качению под давлением, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Rolling resistance scaling factor, lam_My - Масштаб1 (по умолчанию) | scalarМасштабный коэффициент сопротивления качению, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Spin axis velocity breakpoints, VxMy - Точки останова-20:1:20 (по умолчанию) | vectorТочки останова скорости по оси вращения, в м/с.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Mapped torque.
Normal force breakpoints, FzMy - Точки останова0:200:1e4 (по умолчанию) | vectorНормальные силовые точки останова, в Н.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Mapped torque.
Rolling resistance torque map, MyMap - Таблица подстановкиarrayКрутящий момент сопротивления качению в зависимости от частоты вращения оси и нормальной силы в Н· м.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Mapped torque.
Wheel width, WIDTH - Ширина0.209 (по умолчанию) | scalarШирина колеса, WIDTH, в м.
Linear yaw rate resistance, bMz - СопротивлениеscalarЛинейное сопротивление скорости рыскания, bMz, в Н· м· с/рад.
Static friction coefficient, mu_static - Статическое трение.3 (по умолчанию) | scalarКоэффициент статического трения, безразмерный.
Чтобы включить этот параметр, для параметра «Тип тормоза» укажите один из следующих типов:
Disc
Drum
Mapped
Kinetic friction coefficient, mu_kinetic - Кинетическое трение.2 (по умолчанию) | scalarКоэффициент кинематического трения, безразмерный.
Чтобы включить этот параметр, для параметра «Тип тормоза» укажите один из следующих типов:
Disc
Drum
Mapped
Disc brake actuator bore, disc_abore - Расстояние ствола.05 (по умолчанию) | scalarОтверстие привода дискового тормоза, в м.
Для включения параметров дискового тормоза выберите Disc для параметра «Тип тормоза».
Brake pad mean radius, Rm - Радиус.177 (по умолчанию) | scalarСредний радиус тормозной колодки, в м.
Для включения параметров дискового тормоза выберите Disc для параметра «Тип тормоза».
Number of brake pads, num_pads - Подсчет2 (по умолчанию) | scalarКоличество тормозных колодок.
Для включения параметров дискового тормоза выберите Disc для параметра «Тип тормоза».
Drum brake actuator bore, disc_abore - Расстояние ствола0.0508 (по умолчанию) | scalarОтверстие привода тормоза барабана, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin to drum center distance, drum_a - Расстояние0.123 (по умолчанию) | scalarРасстояние от штифта до центра барабана, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin center to force application point distance, drum_c - Расстояние0.212 (по умолчанию) | scalarЦентр штифта колодки для приложения усилия к расстоянию точки приложения, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Drum internal radius, drum_r - Радиус0.15 (по умолчанию) | scalarВнутренний радиус барабана, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin to pad start angle, drum_theta1 - Угол0 (по умолчанию) | scalarШтифт колодки - начальный угол в град.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin to pad end angle, drum_theta2 - Угол126 (по умолчанию) | scalarШтифт башмака к торцу прокладки, в град.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Brake actuator pressure breakpoints, brake_p_bpt - Точки остановаvectorТочки останова тормозного привода, бар.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра «Тип тормоза».
Wheel speed breakpoints, brake_n_bpt - Точки остановаvectorТочки останова колеса, в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра «Тип тормоза».
Brake torque map, f_brake_t - Таблица подстановкиarrayСправочная таблица для тормозного момента, N), является функцией приложенного тормозного давления и скорости колеса, где:
T - тормозной момент в Н· м.
Р - давление торможения, в бар.
N - частота вращения колеса, в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра «Тип тормоза».
Wheel mass, m - Масса9.46491996974568 (по умолчанию) | scalarМасса колеса, в кг. Используется в вычислениях вертикального движения.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Initial tire deflection, zo - Отклонение0 (по умолчанию) | scalarНачальное перемещение оси вдоль оси z, закрепленной на колесе, в м.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Initial wheel vertical velocity (wheel fixed frame), zdoto - Скорость0 (по умолчанию) | scalarНачальная скорость оси вдоль оси z, зафиксированной колесом, в м.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Gravitational acceleration, GRAVITY - Гравитация-9.81 (по умолчанию) | scalarГравитационное ускорение, в м/с ^ 2.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Vertical deflection breakpoints, zFz - Точки останова[0 .01 .1] (по умолчанию) | vectorВектор точек останова боковины, соответствующих таблице сил, в м.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Pressure breakpoints, pFz - Точки останова[10000 1000000] (по умолчанию) | vectorВектор точек данных давления, соответствующих таблице сил, в Па.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Force due to deflection, Fzz - Сила[0 1e3 1e4; 0 1e4 1e5] (по умолчанию) | vectorУсилие, обусловленное отклонением боковой стенки и давлением вдоль оси Z, закрепленной на колесе, в Н.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Vertical velocity breakpoints, zdotFz - Точки останова[-20 0 20] (по умолчанию) | scalarВектор точек останова скорости боковой стенки, соответствующий силе, обусловленной таблицей скоростей, в м.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Force due to velocity, Fzzdot - Сила[500 0 -500;250 0 -250] (по умолчанию) | arrayСила, обусловленная скоростью боковой стенки и давлением вдоль оси Z, закрепленной на колесе, в Н.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Maximum normal force, FZMAX - Сила10000 (по умолчанию) | scalarМаксимальная нормальная сила, в Н. Используется для всех расчетов вертикальной силы.
Minimum normal force, FZMIN - Сила0 (по умолчанию) | scalarМинимальная нормальная сила, в Н. Используется для всех расчетов вертикальной силы.
Maximum pressure, PRESMAX - Давление1003118 (по умолчанию) | scalarМаксимальное давление, PRESMAX, в Па
Minimum pressure, PRESMIN - Давление9982 (по умолчанию) | scalarМинимальное давление, PRESMIN, в Па
Max allowable slip ratio (absolute), KPUMAX - Коэффициент1.5 (по умолчанию) | scalarМакс. допустимый коэффициент проскальзывания (абсолютный), KPUMAX, безразмерный.
Minimum allowable slip ratio (absolute), KPUMIN - Коэффициент-1.5 (по умолчанию) | scalarМинимально допустимый коэффициент проскальзывания (абсолютный), KPUMIN, безразмерный.
Max allowable slip angle (absolute), ALPMAX - Угол1.5708 (по умолчанию) | scalarМаксимальный допустимый угол скольжения (абсолютный), ALPMAX, в рад.
Minimum allowable slip angle (absolute), ALPMIN - Угол-1.5708 (по умолчанию) | scalarМинимальный допустимый угол проскальзывания (абсолютный), ALPMIN, в рад.
Maximum allowable camber angle, CAMMAX - Угол0.173 (по умолчанию) | scalarМаксимально допустимый угол развала CAMMAX, в рад.
Minimum allowable camber angle, CAMMIN - Угол-0.173 (по умолчанию) | scalarМинимальный допустимый угол развала, CAMMIN, в рад.
Minimum ambient temperature, TMIN - Тмин0 (по умолчанию) | scalarМинимальная температура окружающей среды, TMIN, в К.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Maximum ambient temperature, TMAX - Tmax400 (по умолчанию) | scalarМаксимальная температура окружающей среды, TMAX, в К.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
[1] Фиала, Э. «Сейтенкрафте ам Ролленден Люфтрейфен». VDI Zeitschrift, V.D.I.. Том 96, 1954.
[2] Комитет по автомобильным шинам. Пошаговая методика измерения сопротивления качению шин. Стандартные J2452_199906. Уоррендейл, Пенсильвания: SAE International, июнь 1999 года.
[3] ISO 28580:2018. Метод измерения сопротивления качению легкового автомобиля, грузового автомобиля и шины - испытание в одной точке и корреляция результатов измерений. ИСО (Международная организация по стандартизации), 2018 год.
[4] Pacejka, H.B. Tire and Vehicle Dynamics. 3-й ред. Оксфорд, Великобритания: SAE and Butterworth-Heinemann, 2012.
[1] Переиздано с разрешения © 2008 SAE International. Дальнейшее распространение этого материала не допускается без предварительного разрешения SAE.
