Кинематическое рулевое управление Ackerman, реечные и параллельные рулевые механизмы
Блок/управление динамикой транспортного средства
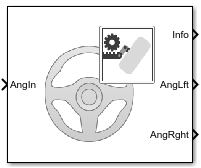
Блок кинематического рулевого управления реализует модель рулевого управления для определения углов левого и правого колес для Акермана, реечных и параллельных рулевых механизмов. Блок использует систему координат транспортного средства.
Для указания типа рулевого управления используется параметр Type.
| Настройка | Блокирование реализации |
|---|---|
| Идеальное рулевое управление Ackerman. Углы колеса имеют общий центр круга поворота. |
| Идеальное рулевое управление рейкой и шестерней. Зубчатые колеса преобразуют поворот рулевого управления в линейное движение. |
| Параллельное рулевое управление. Углы колес равны. |
Чтобы указать тип данных для рулевого механизма, используйте параметр Parametrized by.
| Настройка | Блокирование реализации |
|---|---|
| Механизм рулевого управления использует постоянные данные параметров. |
| Механизм управления реализует таблицы для данных параметров. |
Используйте параметр Location для указания переднего или заднего рулевого управления.
| Настройка | Внедрение |
|---|---|
| Фронт |
Переднее рулевое управление
|
| Задняя часть |
Заднее рулевое управление
|
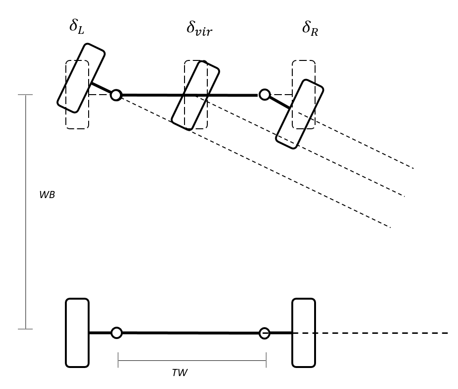
Для идеального рулевого управления Ackerman углы колес имеют общий круг поворота.
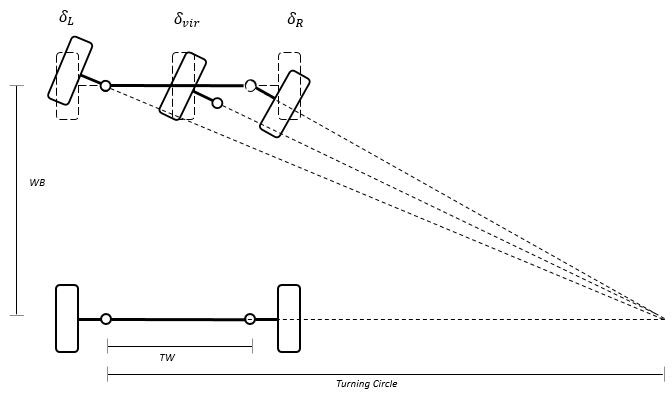
Для вычисления углов поворота блок использует эти уравнения.
(δvir) WB + 0,5 TWW
На иллюстрации и в уравнениях используются эти переменные.
| δin |
Угол поворота рулевого управления |
| δL |
Угол левого колеса |
| δR |
Угол прямого колеса |
| δvir |
Угол виртуального колеса |
| TW |
Ширина дорожки |
| WB |
Основание колеса |
| γ |
Коэффициент рулевого управления |
Для идеального рулевого управления рейкой и шестерней шестерни преобразуют вращение рулевого управления в линейное движение.
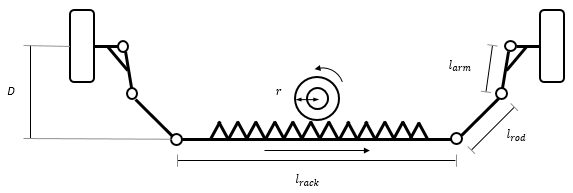
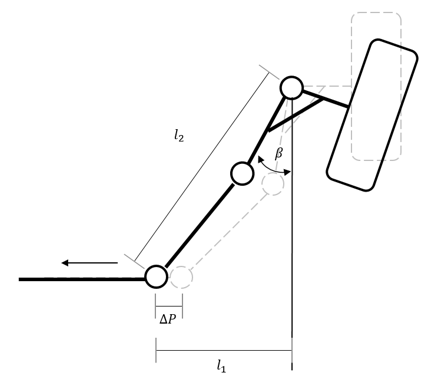
Для вычисления углов поворота блок использует эти уравнения.
[larm2 + l22 − lrod22larml2]
На иллюстрации и в уравнениях используются эти переменные.
| δin |
Угол поворота рулевого колеса |
| δL |
Угол левого колеса |
| δR |
Угол прямого колеса |
| TW |
Ширина дорожки |
| r |
Радиус шестерни |
| ΔP |
Линейное изменение положения стойки |
| D |
Расстояние между передней осью и стойкой |
| lrack |
Длина корпуса стойки |
| larm |
Длина рулевого рычага |
| lrod |
Длина тяги |
Для параллельного рулевого управления углы колес равны.
Для вычисления углов поворота блок использует это уравнение.
δinγ
На иллюстрации и в уравнениях используются эти переменные.
| δin |
Угол поворота рулевого колеса |
| δL |
Угол левого колеса |
| δR |
Угол прямого колеса |
| γ |
Коэффициент рулевого управления |
Type - Выбор типа рулевого управленияAckerman (по умолчанию) | Rack and pinion | ParallelДля указания типа рулевого управления используется параметр Type.
| Настройка | Блокирование реализации |
|---|---|
| Идеальное рулевое управление Ackerman. Углы колеса имеют общий центр круга поворота. |
| Идеальное рулевое управление рейкой и шестерней. Зубчатые колеса преобразуют поворот рулевого управления в линейное движение. |
| Параллельное рулевое управление. Углы колес равны. |
Эта таблица суммирует тип и параметризованные зависимости параметров.
| Напечатать | Параметризовано по | Создание параметров |
|---|---|---|
|
| Constant |
Ширина дорожки, TrckWdth Колесная база, WhlBase Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Рулевое управление, StrgRatio |
Lookup table |
Ширина дорожки, TrckWdth Колесная база, WhlBase Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Точки останова угла рулевого управления, StrgAngBpts Таблица рулевых коэффициентов, StrgTBl | |
|
|
|
Ширина дорожки, TrckWdth Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Длина рулевого рычага, StrgArmLngth Длина корпуса стойки, RckCsLngth Длина тяги, Р RodLngth Расстояние между передней осью и стативом, D Радиус шестерни, PnnРадиус |
|
|
Ширина дорожки, TrckWdth Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Точки останова угла рулевого управления, StrgAngBpts Длина рулевого рычага, StrgArmLngth Длина корпуса стойки, RckCsLngth Длина тяги, Р RodLngth Расстояние между передней осью и стативом, D Радиус шестерни, PnnРадиус Tbl | |
Parallel | Constant |
Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Рулевое управление, StrgRatio |
Lookup table |
Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Точки останова угла рулевого управления, StrgAngBpts Таблица рулевых коэффициентов, StrgTBl |
Parametrized by - Выберите параметризациюConstant (по умолчанию) | Lookup tableЧтобы указать тип данных для рулевого механизма, используйте параметр Parametrized by.
| Настройка | Блокирование реализации |
|---|---|
| Механизм рулевого управления использует постоянные данные параметров. |
| Механизм управления реализует таблицы для данных параметров. |
Эта таблица суммирует тип и параметризованные зависимости параметров.
| Напечатать | Параметризовано по | Создание параметров |
|---|---|---|
|
| Constant |
Ширина дорожки, TrckWdth Колесная база, WhlBase Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Рулевое управление, StrgRatio |
Lookup table |
Ширина дорожки, TrckWdth Колесная база, WhlBase Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Точки останова угла рулевого управления, StrgAngBpts Таблица рулевых коэффициентов, StrgTBl | |
|
|
|
Ширина дорожки, TrckWdth Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Длина рулевого рычага, StrgArmLngth Длина корпуса стойки, RckCsLngth Длина тяги, Р RodLngth Расстояние между передней осью и стативом, D Радиус шестерни, PnnРадиус |
|
|
Ширина дорожки, TrckWdth Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Точки останова угла рулевого управления, StrgAngBpts Длина рулевого рычага, StrgArmLngth Длина корпуса стойки, RckCsLngth Длина тяги, Р RodLngth Расстояние между передней осью и стативом, D Радиус шестерни, PnnРадиус Tbl | |
Parallel | Constant |
Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Рулевое управление, StrgRatio |
Lookup table |
Зона нечувствительности, БД Диапазон рулевого управления, StrgRng Точки останова угла рулевого управления, StrgAngBpts Таблица рулевых коэффициентов, StrgTBl |
Location - Выберите местоположениеИспользуйте параметр Location для указания переднего или заднего рулевого управления.
| Настройка | Внедрение |
|---|---|
| Фронт |
Переднее рулевое управление
|
| Задняя часть |
Заднее рулевое управление
|
Normalization factor, NrmFctr - Отрегулировать угол поворота руляscalarКоэффициент, NrmFctr, который блок использует для регулировки коэффициента поворота, γ или радиуса шестерни, r. Блок может нормализоваться, только если параметризован значением Constant.
Чтобы настроить коэффициент поворота или радиус шестерни, щелкните Нормализовать (Normalize).
| Тип рулевого управления | Нормализация |
|---|---|
| Блок обновляет коэффициент управления, параметр StrgRatio, до нормализованного значения γ nrm, заданного этим уравнением. 1NrmFctr |
| Блок обновляет значение параметра Радиус шестерни (PnnRadius) с использованием коэффициента нормализации NrmFctr. |
Track width, TrckWdth - Ширина1 (по умолчанию) | scalarШирина пути, TW, в м.
Чтобы создать этот параметр, задайте для параметра Тип значение Ackerman или Rack and pinion.
Wheel base, WhlBase - База1.524 (по умолчанию) | scalarОснование колеса, WB, в м.
Чтобы создать этот параметр, задайте для параметра Тип значение Ackerman.
Deadband, Db - Зона нечувствительности0 (по умолчанию) | scalarУгол поворота зоны нечувствительности перед зацеплением шестерни с шестерней, в рад.
Steering range, StrgRng - Диапазон1.25*pi (по умолчанию) | scalarДиапазон рулевого управления, в радиусах. Блок ограничивает углы колеса, чтобы оставаться в пределах диапазона рулевого управления.
Steering ratio, StrgRatio - Коэффициент100 (по умолчанию) | scalarРулевое отношение, γ, безразмерное.
Чтобы создать этот параметр:
Задать тип для Ackerman или Parallel.
Задать параметризованное значение Constant.
Steering angle breakpoints, StrgAngBpts - Точки останова[-6.2832 -5.0265 -3.7699 -2.5133 -1.2566 0 1.2566 2.5133 3.7699 5.0265 6.2832] (по умолчанию) | vectorТочки останова угла поворота, в рад.
Чтобы создать этот параметр, задайте Параметризовано Lookup table.
Steering ratio table, StrgRatioTbl - Таблица[13.5000 13.3750 13.2500 13.1250 13.0000 13.0000 13.0000 13.1250 13.2500 13.3750 13.5000] (по умолчанию) | vectorТаблица рулевого передаточного числа, γ, безразмерная.
Чтобы создать этот параметр:
Задать тип для Ackerman или Parallel.
Задать параметризованное значение Lookup table.
Steering arm length, StrgArmLngth - Длина0.1 (по умолчанию) | scalarДлина рулевого рычага, larm, в м.
Чтобы создать этот параметр, задайте для параметра Тип значение Rack and pinion.
Rack casing length, RckCsLngth - Длина0.5 (по умолчанию) | scalarДлина корпуса эстакады, lrack, в м.
Чтобы создать этот параметр, задайте для параметра Тип значение Rack and pinion.
Tie rod length, TieRodLngth - Длина0.248 (по умолчанию) | scalarДлина тяги, лрод, в м.
Чтобы создать этот параметр, задайте для параметра Тип значение Rack and pinion.
Distance between front axis and rack, D - Расстояние0.2 (по умолчанию) | scalarРасстояние между передней осью и рейкой, D, в м.
Чтобы создать этот параметр, задайте для параметра Тип значение Rack and pinion.
Pinion radius, PnnRadius - Радиус0.0057 (по умолчанию) | scalarРадиус шестерни, r, в м.
Чтобы создать этот параметр:
Задать тип для Rack and pinion.
Задать параметризованное значение Constant.
Pinion radius table, PnnRadiusTbl - Таблица[0.0055 0.0055 0.0056 0.0057 0.0057 0.0057 0.0058 0.0057 0.0056 0.0055 0.0055] (по умолчанию) | vectorТаблица радиусов шестерен, r, в м.
Чтобы создать этот параметр:
Задать тип для Rack and pinion.
Задать параметризованное значение Lookup table.
[1] Кролла, Дэвид, Дэвид Фостер, и др. Энциклопедия автомобильной техники. Том 4, часть 5 (системы шасси) и часть 6 (электрические и электронные системы). Чичестер, Западный Суссекс, Великобритания: John Wiley & Sons Ltd, 2015.
[2] Гиллеспи, Томас. Основы динамики транспортных средств. Уоррендейл, Пенсильвания: Общество автомобильных инженеров, 1992.
[3] Комитет по стандартам динамики транспортных средств. Терминология динамики транспортных средств. SAE J670. Уоррендейл, Пенсильвания: Общество автомобильных инженеров, 2008.