Трехосный кузов транспортного средства с продольным, боковым и рыскательным движением
Блок динамики транспортного средства/кузов транспортного средства
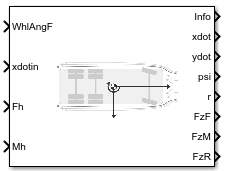
Блок кузова транспортного средства 3DOF трех осей реализует жесткую трехосную модель кузова транспортного средства для расчета продольного, бокового и рыскательного движения. Блок учитывает силу реакции на ось и сцепку из-за ускорения массы кузова транспортного средства, аэродинамического сопротивления и рулевого управления.
Используйте этот блок в исследованиях динамики транспортного средства и автоматического вождения для моделирования неголономного движения транспортного средства, когда шаг транспортного средства, крен и вертикальное движение не являются значимыми.
Используйте параметр Дорожка транспортного средства (Vehicle track), чтобы указать количество дорожек.
| Настройка пути для транспортного средства | Внедрение |
|---|---|
|
|
| Силы действуют в местах жесткой точки оси. |
Параметр «Силы моста» используется для задания типа силы.
| Настройка сил на ось | Внедрение |
|---|---|
|
|
|
|
|
|
Чтобы создать дополнительные входные порты, в разделе Входные сигналы выберите эти параметры блока.
Параметр панели входных сигналов | Входной порт | Описание |
|---|---|---|
Рулевое управление передним колесом |
| Угол переднего колеса, δF |
| Рулевое управление среднего колеса | WhlAngM | Угол среднего колеса, δМ |
| Рулевое управление задним колесом | WhlAngR | Угол заднего колеса, δR |
Внешний ветер |
| Скорость ветра, WX, WY и WZ, в инерциальной системе отсчета |
| Внешнее трение | Mu | Коэффициент трения |
| Внешние силы | FExt | Внешнее усилие на центр тяжести транспортного средства (CG), Fx, Fy и Fz в неподвижной раме транспортного средства |
| Внешние моменты |
| Внешний момент о транспортном средстве CG, Mx, My и Mz в неподвижной раме транспортного средства |
| Фронтальные замковые силы | FhF | Усилие сцепки, приложенное к кузову в месте расположения передней сцепки, FhFx, FhFy и FhFz, в неподвижной раме транспортного средства |
| Моменты передней заминки | MhF | Момент сцепки в месте передней сцепки, МгFx, МгFy и МгFz, о неподвижной раме транспортного средства |
| Усилия задней сцепки | FhR | Усилие сцепления, приложенное к кузову в заднем положении сцепления, FhRx, FhRy и FhRz, в неподвижной раме транспортного средства |
| Моменты задней сцепки | MhR | Момент сцепки в заднем положении сцепки, МгРх, МгРу и МгРц, о неподвижной раме транспортного средства |
Исходное продольное положение |
| Первоначальное перемещение КР транспортного средства вдоль закрепленной на земле оси Х |
Начальный угол рыскания |
| Первоначальное вращение рамы, закрепленной на транспортном средстве, вокруг оси Z, закрепленной на земле (рыскание) |
Начальная продольная скорость |
| Начальная скорость CG транспортного средства вдоль оси X, зафиксированной на транспортном средстве |
Начальная скорость рыскания |
| Начальная угловая скорость транспортного средства вокруг фиксированной оси z (скорость рыскания) |
Исходное боковое положение |
| Первоначальное перемещение КР транспортного средства вдоль оси Y, зафиксированной на земле |
Температура воздуха | AirTemp | Температура окружающего воздуха. Эта опция используется для изменения температуры во время выполнения. |
Начальная поперечная скорость |
| Начальная скорость CG транспортного средства вдоль фиксированной оси y транспортного средства |
Для определения движения транспортного средства блок решает плоские динамические уравнения движения жесткого тела.
| Вычисление | Описание |
|---|---|
Динамика | Блок решает уравнения плоской динамики жесткого тела для определения продольного движения транспортного средства. Если для параметра «Силы оси» задано значение |
Внешние силы | Внешние силы включают в себя как входные силы перетаскивания, так и входные внешние силы. Силы действуют на транспортное средство CG. Блок делит нормальные силы на номинальную нормальную нагрузку для изменения эффективных параметров трения во время передачи веса и нагрузки. Блок поддерживает равновесие тангажа и крена. |
Силы шины | Блок использует соотношение локальных, продольных и боковых скоростей для определения углов скольжения. Блок использует углы поворота для преобразования сил шины в неподвижную раму транспортного средства. Если для параметра «Силы оси» задано значение |
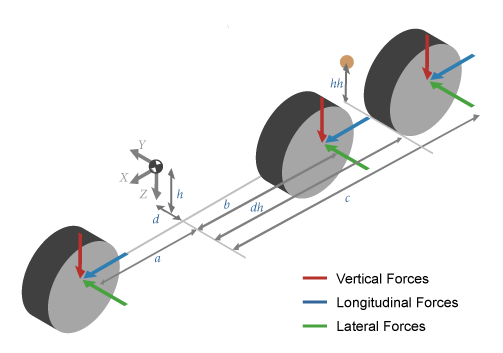
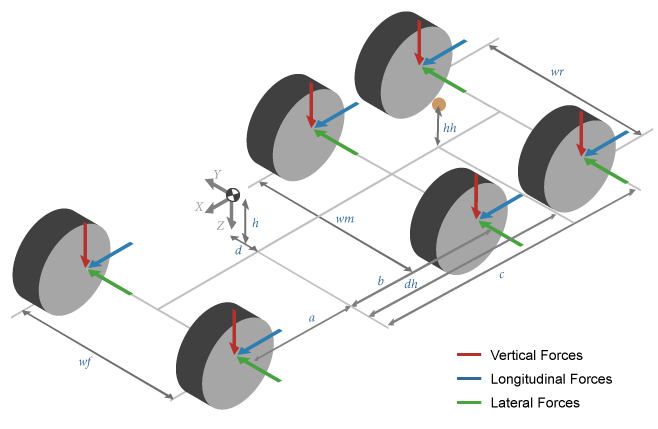
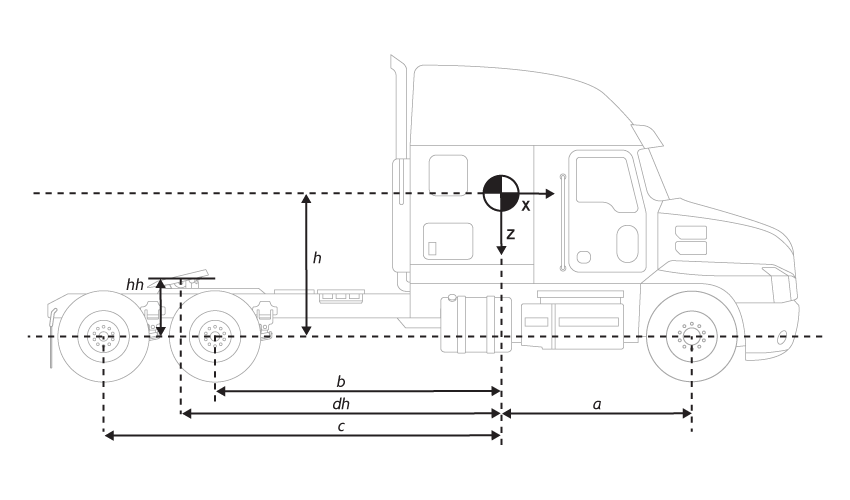
В иллюстрациях используются эти переменные.
| a, b, c | Продольное расстояние между передней, средней и задней осями соответственно от нормальной точки проекции КР транспортного средства на плоскость общей оси |
| h | Высота CG транспортного средства над плоскостью оси вдоль оси z, закрепленной на транспортном средстве |
| d | Боковое расстояние от геометрической осевой линии до центра масс вдоль оси y, закрепленной на транспортном средстве |
| гд | Высота сцепки над плоскостью оси вдоль оси z, закрепленной на транспортном средстве |
| горячекатаный | Продольное расстояние сцепки от нормальной точки проекции КР транспортного средства на плоскость общей оси |
| hl | Боковое расстояние от центра масс до сцепки вдоль закрепленной на транспортном средстве оси Y. |
| wf, wm, wr | Ширина передней, средней и задней дорожек соответственно |
Эта таблица суммирует реализацию блока для вычисления перетаскивания.
| Вычисление | Описание |
|---|---|
Преобразование координат | Блок преобразует скорости ветра из инерционной рамы в неподвижную раму транспортного средства. |
Силы перетаскивания | Чтобы определить относительную воздушную скорость, блок вычитает скорость ветра из скорости CG транспортного средства. Используя относительную воздушную скорость, блок определяет силы сопротивления. |
Моменты перетаскивания | Используя относительную воздушную скорость, блок определяет моменты перетаскивания. |
Чтобы включить динамические параметры привязанной жесткости угла и длины релаксации, задайте для параметра Силы оси значение External longitudinal force или External longitudinal velocity.
| Параметры настройки | Описание | |
|---|---|---|
| Привязанная жесткость угла | Включить динамику длины релаксации | |
|
| Блок использует постоянные угловые значения жесткости. Углы скольжения включают динамические настройки длины релаксации. Длина релаксации приближается к эффективной угловой силе жесткости, которая является функцией перемещения колеса. |
|
| Блок использует таблицы поиска, которые являются функциями данных жесткости угла и углов скольжения. Углы скольжения включают динамические настройки длины релаксации. Длина релаксации приближается к эффективной угловой силе жесткости, которая является функцией перемещения колеса. |
|
| Блок использует постоянные угловые значения жесткости. |
Vehicle track - Количество транспортных путейDual (по умолчанию) | Single (bicycle)Используйте параметр Дорожка транспортного средства (Vehicle track), чтобы указать количество дорожек.
| Настройка пути для транспортного средства | Внедрение |
|---|---|
|
|
| Силы действуют в местах жесткой точки оси. |
Axle forces - Тип осевого усилияExternal longitudinal velocity (по умолчанию) | External longitudinal forces | External forcesПараметр «Силы моста» используется для задания типа силы.
| Настройка сил на ось | Внедрение |
|---|---|
|
|
|
|
|
|
Front wheel steering — WhlAngF входной портon (по умолчанию) | offВыберите для создания входного порта WhlAngF.
Middle wheel steering — WhlAngM входной портoff (по умолчанию) | onВыберите для создания входного порта WhlAngM.
Rear wheel steering — WhlAngR входной портoff (по умолчанию) | onВыберите для создания входного порта WhlAngR.
External wind — WindXYZ входной портoff (по умолчанию) | onВыберите для создания входного порта WindXYZ.
External friction — Mu входной портoff (по умолчанию) | onВыберите для создания входного порта Mu.
Чтобы включить этот параметр, установите для параметра Силы оси значение External longitudinal forces или External forces.
External forces — FExt входной портoff (по умолчанию) | onВыберите для создания входного порта FExt.
External moments — MExt входной портoff (по умолчанию) | onВыберите для создания входного порта MExt.
Hitch forces — Fh входной портon (по умолчанию) | offВыберите для создания входного порта Fh.
Hitch moments — Mh входной портon (по умолчанию) | offУкажите, чтобы создать входной порт Mh.
Initial longitudinal position — X_o входной портoff (по умолчанию) | onУкажите, чтобы создать входной порт X_o.
Initial yaw angle — psi_o входной портoff (по умолчанию) | onУкажите, чтобы создать входной порт psi_o.
Initial longitudinal velocity — xdot_o входной портoff (по умолчанию) | onУкажите, чтобы создать входной порт xdot_o.
Чтобы включить этот параметр, установите для параметра Силы оси значение External longitudinal forces или External forces.
Initial yaw rate — r_o входной портoff (по умолчанию) | onУкажите, чтобы создать входной порт r_o.
Initial lateral position — Y_o входной портoff (по умолчанию) | onУкажите, чтобы создать входной порт Y_o.
Air temperature — AirTemp входной портoff (по умолчанию) | onУкажите, чтобы создать входной порт AirTemp.
Initial lateral velocity — ydot_o входной портoff (по умолчанию) | onУкажите, чтобы создать входной порт ydot_o.
Number of wheels on front axle, NF - Количество передних колес2 (по умолчанию) | scalarКоличество колес на передней оси, NF, безразмерное.
Number of wheels on middle axle, NM - Число средних колес2 (по умолчанию) | scalarКоличество колес на средней оси, NM, безразмерное.
Number of wheels on rear axle, NR - Количество задних колес2 (по умолчанию) | scalarКоличество колес на задней оси, NR, безразмерное.
Vehicle mass, m - Масса транспортного средства47000 (по умолчанию) | scalarМасса транспортного средства, м, в кг.
Longitudinal distance from center of mass to front axle, a - Расстояние от СМ до передней оси0.5 (по умолчанию) | scalarРасстояние от ТС до передней оси, а, в м.
Longitudinal distance from center of mass to middle axle, b - Расстояние от КМ до средней оси4.5 (по умолчанию) | scalarРасстояние от КМ транспортного средства до средней оси, b, в м.
Longitudinal distance from center of mass to rear axle, c - Расстояние от КМ до задней оси5.7 (по умолчанию) | scalarРасстояние от КМ транспортного средства до задней оси, c, в м.
Vertical distance from center of mass to axle plane, h - Расстояние от СМ до плоскости оси0.3 (по умолчанию) | scalarРасстояние по вертикали от КМ транспортного средства до плоскости оси, h, в м.
Vertical distance from hitch to axle plane, hh - Расстояние от сцепки до плоскости оси0.5 (по умолчанию) | scalarРасстояние по вертикали от сцепки до плоскости оси, чч, в м.
Чтобы включить этот параметр, на панели Входные сигналы (Input signals) выберите Силы зацепления (Hitch forces) или Моменты зацепления (Hitch moments).
Longitudinal distance from center of mass to hitch, dh - Расстояние от КМ до сцепки5 (по умолчанию) | scalarПродольное расстояние от центра масс до сцепки, dh, в м.
Чтобы включить этот параметр, на панели Входные сигналы (Input signals) выберите Силы зацепления (Hitch forces) или Моменты зацепления (Hitch moments).
Initial inertial frame longitudinal position, X_o - Начальное продольное перемещение0 (по умолчанию) | scalarНачальное перемещение КР транспортного средства вдоль закрепленной на земле оси Х, в м.
Initial longitudinal velocity, xdot_o - Начальная продольная скорость0 (по умолчанию) | scalarНачальная скорость CG транспортного средства вдоль оси х, закрепленной на транспортном средстве, в м/с.
Чтобы включить этот параметр, установите для параметра Силы оси одну из следующих опций:
External longitudinal forces
External forces
Mapped corner stiffness - Включить привязанную жесткость углаoff (по умолчанию) | onВключение расчета жесткости сопряженного угла.
Чтобы включить этот параметр, установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Include relaxation length dynamics - Включить динамику длины релаксацииon (по умолчанию) | offВключает динамику длины релаксации.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить привязанную жесткость угла.
Lateral distance from geometric centerline to center of mass, d - Расстояние от осевой линии до CM0 (по умолчанию) | scalarБоковое расстояние от геометрической осевой линии до центра масс, d, в м, вдоль оси y, закрепленной на транспортном средстве. Положительные значения указывают на то, что CM транспортного средства находится справа от геометрической осевой линии. Отрицательные значения указывают на то, что ТС СМ находится слева от геометрической осевой линии.
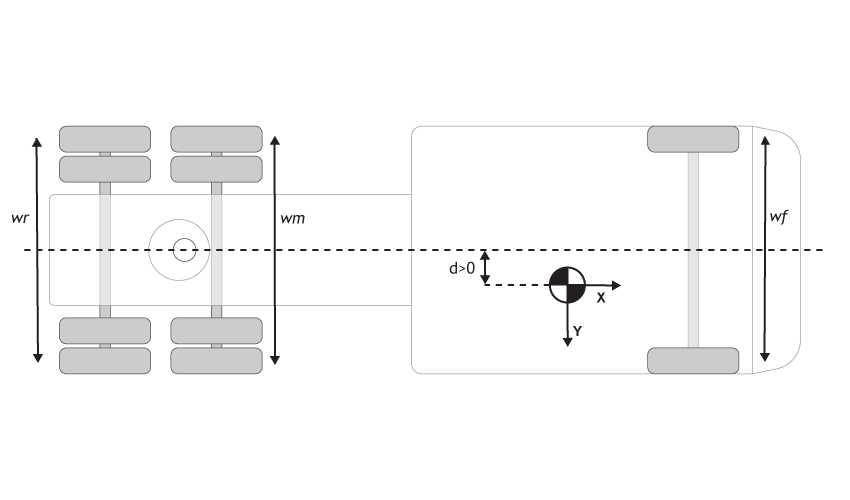
Track width, w - Ширина передней, средней и задней дорожек[1.82,1.82,1.82] (по умолчанию) | vectorШирина передней, средней и задней дорожек, wf, wm и wr, соответственно, в м. Размеры: 1-by-3.
Чтобы включить этот параметр, установите в поле Дорожка транспортного средства значение Dual.
Front axle tire corner stiffness, Cy_f - Жесткость переднего угла шины12e3 | scalarЖесткость переднего угла шины, Cyf, в Н/рад.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить привязанную жесткость угла.
Middle axle tire corner stiffness, Cy_m - Жесткость угла средней шины11e3 | scalarЖесткость угла шины среднего моста, Cym, in N/rad.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить привязанную жесткость угла.
Rear axle tire corner stiffness, Cy_r - Жесткость заднего угла шины11e3 | scalarЖесткость угла шины заднего моста, Cyr, в Н/рад.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить привязанную жесткость угла.
Front tire(s) relaxation length, sigma_f - Длина релаксации передней шины.1 (по умолчанию) | scalarДлина релаксации передних шин в м.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выполните одно из следующих действий:
Выберите Привязанная жесткость угла (Mapped corner stiffn
Снимите флажок Сопоставленная жесткость угла (Mapped corner stiffness) и выберите Включить динамику длины релаксации (In
Middle tire(s) relaxation length, sigma_m - Средняя длина релаксации шины.1 (по умолчанию) | scalarДлина релаксации средней шины, в м.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выполните одно из следующих действий:
Выберите Привязанная жесткость угла (Mapped corner stiffn
Снимите флажок Сопоставленная жесткость угла (Mapped corner stiffness) и выберите Включить динамику длины релаксации (In
Rear tire(s) relaxation length, sigma_r - Длина релаксации задней шины.1 (по умолчанию) | scalarДлина релаксации задней шины,
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выполните одно из следующих действий:
Выберите Привязанная жесткость угла (Mapped corner stiffn
Снимите флажок Сопоставленная жесткость угла (Mapped corner stiffness) и выберите Включить динамику длины релаксации (In
Front axle slip angle breakpoints, alpha_f_brk - Точки останова[-.1 .1] (по умолчанию) | vectorТочки останова угла скольжения передней оси, αfbrk, в рад.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Привязанная жесткость угла (Mapped corner stiffn
Front axle tire corner data, Cy_f_data - Данные об углу шины передней оси[-9e3 9e3] (по умолчанию) | vectorДанные угла шины передней оси, Cyfdata, in N/rad.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Привязанная жесткость угла (Mapped corner stiffn
Middle axle slip angle breakpoints, alpha_m_brk - Точки останова[-.1 .1] (по умолчанию) | vectorТочки останова среднего моста, αмбрк, в рад.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Привязанная жесткость угла (Mapped corner stiffn
Middle axle tire corner data, Cy_m_data - Данные угла шины средней оси[-9e3 9e3] (по умолчанию) | vectorДанные угла шины средней оси, Cymdata, in N/rad.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Привязанная жесткость угла (Mapped corner stiffn
Rear axle slip angle breakpoints, alpha_r_brk - Точки останова[-.1 .1] (по умолчанию) | vectorТочки останова угла скольжения заднего моста, αrbrk, в рад.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Привязанная жесткость угла (Mapped corner stiffn
Rear axle tire corner data, Cy_r_data - Данные об углу шины заднего моста[-9e3 9e3] (по умолчанию) | vectorДанные угла шины заднего моста, Cyrdata, in N/rad.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Привязанная жесткость угла (Mapped corner stiffn
Initial inertial frame lateral displacement, Y_o - Начальное боковое смещение0 (по умолчанию) | scalarИсходное перемещение КР транспортного средства по закрепленной на земле оси Y, в м.
Initial lateral velocity, ydot_o - Начальная поперечная скорость0 (по умолчанию) | scalarНачальная скорость CG транспортного средства вдоль оси y, закрепленной на транспортном средстве, в м/с.
Yaw polar inertia, Izz - Инерция4000 (по умолчанию) | scalarПолярная инерция рыскания, в кг * м ^ 2.
Initial yaw angle, psi_o - Вращение Psi0 (по умолчанию) | scalarВращение неподвижной рамы транспортного средства вокруг закрепленной на земле оси Z (рыскание) в рад.
Initial yaw rate, r_o - Скорость рыскания0 (по умолчанию) | scalarУгловая скорость транспортного средства вокруг неподвижной оси Z транспортного средства (скорость рыскания) в рад/с.
Longitudinal drag area, Af - Эффективная площадь поперечного сечения транспортного средства2 (по умолчанию) | scalarЭффективная площадь Af поперечного сечения транспортного средства для расчета силы аэродинамического сопротивления транспортного средства в м2.
Longitudinal drag coefficient, Cd - Коэффициент лобового сопротивления воздуха.3 (по умолчанию) | scalarКоэффициент воздушного сопротивления, Кд. Значение является безразмерным.
Longitudinal lift coefficient, Cl - Коэффициент подъема воздуха.1 (по умолчанию) | scalarКоэффициент подъема воздуха, Cl. Значение безразмерно.
Longitudinal drag pitch moment, Cpm - Тяга по шагу.1 (по умолчанию) | scalarКоэффициент момента шага продольного сопротивления, Cpm. Значение является безразмерным.
Relative wind angle vector, beta_w - Угол ветра[0:0.01:0.3] (по умолчанию) | vectorВектор относительного угла ветра, βw, в рад.
Side force coefficient vector, Cs - Коэффициент боковой силы [0:0.03:0.9] (по умолчанию) | vectorКоэффициент вектора коэффициента боковой силы, Cs. Значение является безразмерным.
Yaw moment coefficient vector, Cym - Перетаскивание момента рыскания[0:0.01:0.3] (по умолчанию) | vectorКоэффициент вектора момента рыскания, Cym. Значение является безразмерным.
Absolute air pressure, Pabs - Давление101325 (по умолчанию) | scalarАбсолютное давление окружающей среды, Pabs, в Па.
Air temperature, Tair - Температура273 (по умолчанию) | scalarАбсолютная температура окружающей среды, Т, в К.
Чтобы включить этот параметр, снимите флажок «Температура воздуха».
Gravitational acceleration, g - Гравитация9.81 (по умолчанию) | scalarГравитационное ускорение, g, в м/с ^ 2.
Nominal friction scaling factor, mu - Коэффициент шкалы трения1 (по умолчанию) | scalarНоминальный коэффициент фрикционной шкалы, мкм. Значение является безразмерным.
Чтобы включить этот параметр:
Установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Снимите флажок «Внешнее трение».
Longitudinal velocity tolerance, xdot_tol - Допуск.01 (по умолчанию) | scalarДопуск продольной скорости, в м/с.
Nominal normal force, Fznom - Нормальная сила5000 (по умолчанию) | scalarНоминальная нормальная сила, в Н.
Чтобы включить этот параметр, установите для параметра Силы оси одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Geometric longitudinal offset from axle plane, longOff - Продольное смещение0 (по умолчанию) | scalarШасси транспортного средства смещено от плоскости оси вдоль оси x, закрепленной на транспортном средстве, в м. При использовании 3D двигателя визуализации рассмотрите возможность использования смещения для определения местоположения шасси независимо от CG транспортного средства.
Geometric lateral offset from center plane, latOff - Боковое смещение0 (по умолчанию) | scalarШасси транспортного средства смещено от центральной плоскости вдоль оси y, закрепленной на транспортном средстве, в м. При использовании 3D двигателя визуализации рассмотрите возможность использования смещения для определения местоположения шасси независимо от CG транспортного средства.
Geometric vertical offset from axle plane, vertOff - Смещение по вертикали0 (по умолчанию) | scalarШасси транспортного средства смещено от плоскости оси вдоль оси z, закрепленной на транспортном средстве, в м. При использовании 3D двигателя визуализации рассмотрите возможность использования смещения для определения местоположения шасси независимо от CG транспортного средства.
Wrap Euler angles, wrapAng - Оберните углы Эйлера в интервал [-pi, pi]off (по умолчанию) | onОберните углы Эйлера в интервал [-pi, pi]. Для маневров транспортного средства, которые могут подвергаться вращениям рыскания за пределами этого интервала, рекомендуется очистить параметр, если необходимо:
Отслеживание полного поворота транспортного средства на рыскание.
Избегайте разрывов в оценщиках состояния транспортного средства.
[1] Гиллеспи, Томас. Основы динамики транспортных средств. Уоррендейл, Пенсильвания: Общество автомобильных инженеров (SAE), 1992.

