Расстояние между транспортным средством и шинами и объектами
Блок динамики транспортного средства/Сценарии транспортного средства/ Sim3D/ Sim3D Транспортное средство/Компоненты
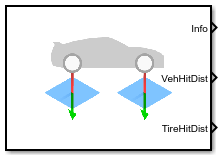
Блок Vehicle Terrain Sensor реализует трассировку лучей для обнаружения местности под шинами и объектами перед транспортным средством. В частности, для этих компонентов актера блок возвращает местоположение попадания (в мировой системе координат) и расстояние до объекта.
Кузов транспортного средства
Левое переднее колесо
Правое переднее колесо
Левое заднее колесо
Правое заднее колесо
Совет
Убедитесь, что блок «Датчик рельефа транспортного средства» выполняется перед блоком «Имитация» 3D «Камера». Таким образом, среда визуализации Unreal Engine ® 3D подготавливает данные до их получения блоком датчика рельефа транспортного средства. Чтобы проверить порядок выполнения блока, щелкните его правой кнопкой мыши и выберите «Свойства». На вкладке Общие подтвердите следующие параметры приоритета:
Моделирование 3D Конфигурация сцены - 0
Датчик рельефа транспортного средства - 1
Дополнительные сведения о порядке выполнения см. в разделе Управление и просмотр порядка выполнения.
Актеры - это объекты сцены, поддерживающие 3D перемещение, поворот и масштаб. Детали являются компонентами актера. Компоненты не существуют сами по себе; они связаны с актером.
Чтобы рассчитать расстояния попадания, показанные на рисунке, блок реализует эти уравнения.
| Передняя часть транспортного средства к объекту, DistToHitVhAdjust |
DistToHitVh = GetLength(CntrLocVh,HitLocVh) DistToHitVhAdjust = DistToHitVh - VehCntrLngthVal EndLocVh = CntrLocVh + VehRayLngth - VehRayOffset VehRayOffset = CntrLocVh - StartLocVh VehRayLngth = StartLocVh - EndLocVh |
Шины на местности, DistToHitTrAdjust |
DistToHitTr = GetLength(CntrLocTr, HitLocTr) DistToHitTrAdjust = DistToHitTr - TireRadiiVal EndLocTr = CntrLocTr + LengthTr - OffsetTr OffsetTr = CntrLocTr - StartLocTr LengthTr = StartLocTr - EndLocTr |
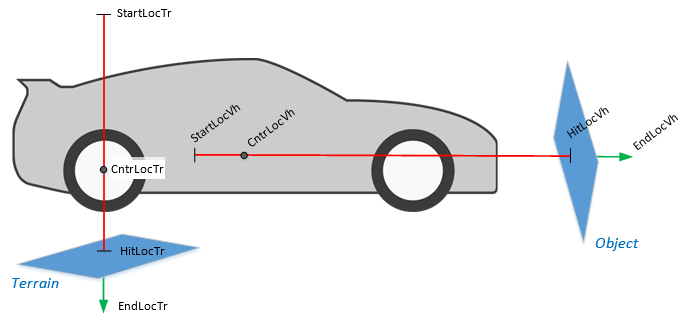
Эта иллюстрация и уравнения используют эти переменные.
| CntrLocVh | Расположение центра транспортного средства |
| DistToHitVh | Расстояние от центра транспортного средства до объекта |
| DistToHitVhAdjust | Расстояние от передней части транспортного средства до объекта |
| EndLocVh | Конец следа луча транспортного средства |
| HitLocVh | Место наезда на транспортное средство |
| OffsetVh | Смещение следов транспортного средства |
| StartLocVh | Запуск следов лучей транспортного средства |
| VehRayLngth | Длина следов транспортного средства |
| VehCntrLngthVal | Расстояние от центра транспортного средства до передней части |
| CntrLocTr | Расположение центра шины |
| DistToHitTr | Расстояние от центра шины до рельефа местности |
| DistToHitTrAdjust | Расстояние от шины до рельефа местности |
| HitLocTr | Место попадания шины |
| EndLocTr | Конец следа лучей шины |
| OffsetTr | Смещение трассы шины |
| StartLocTr | Начало трассировки лучей шины |
| LengthTr | Длина следа шины |
| TireRadiiVal | Радиус шины |
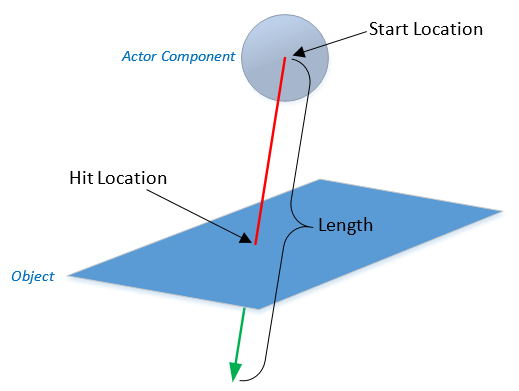
Для определения события попадания блок использует трассировку луча. Блок обеспечивает расположение попадания в мировой системе координат.
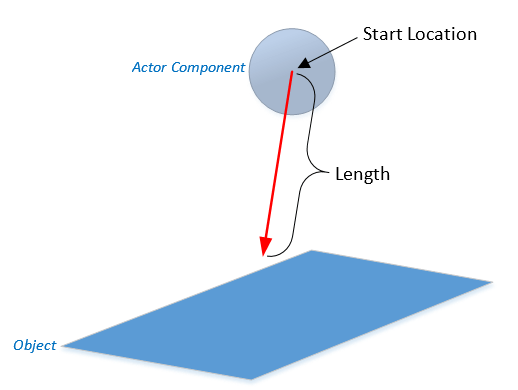
Чтобы определить событие промаха, блок использует трассировку луча.
Моделирование 3D Получение камеры | Моделирование 3D конфигурация сцены | Моделирование 3D транспортного средства | Имитация 3D транспортного средства со следующим грунтом
