Калибровочный Toolbox™ на основе модели позволяет создавать оптимизированные параметры подвески для блоков Независимая подвеска - картированная подвеска и подвеска на твердой оси - картированные блоки с помощью виртуальной испытательной лаборатории кинематики (K) и соответствия (C).
Для создания и открытия рабочей копии эталонного приложения виртуальной испытательной лаборатории K и C введите
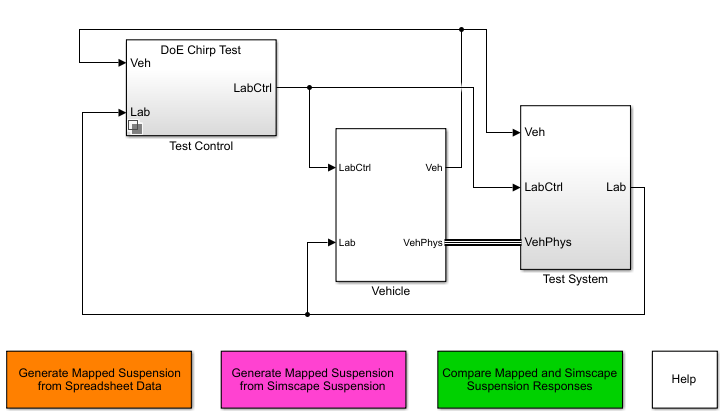
Виртуальная испытательная лаборатория K и C содержит транспортное средство, испытательную систему и подсистемы управления испытаниями. Система транспортного средства имеет два варианта:
Simscape Multibody Vehicle - Транспортное средство с системой подвески Simscape™ Multibody™
VDBS Vehicle - Транспортное средство с независимой подвеской - картографический блок
В этой таблице представлены результаты виртуальных тестовых лабораторных испытаний.
| Тест | Цель | Метод |
|---|---|---|
Создание сопоставленной подвески из данных электронной таблицы | Используйте данные измеренной вертикальной силы и геометрии подвески для формирования калиброванных параметров подвески для отображенных блоков подвески. Примечание Для генерации измеренных данных подвески можно использовать симуляционную модель стороннего производителя. |
Виртуальная испытательная лаборатория использует панель инструментов калибровки на основе модели для подгонки моделей угла развала, угла носка и откоса вертикальной силы для данных. Затем виртуальная тестовая лаборатория использует ответные модели для генерации параметров подвески для блоков подвески. |
Создать отображенную подвеску из суспензии Simscape | Используйте систему подвески Simscape Multibody для создания калиброванных параметров подвески для отображаемых блоков подвески. |
Виртуальная испытательная лаборатория использует панель калибровочных инструментов на основе модели для разработки последовательности Sobol экспериментов (DoE) в рабочих точках высоты подвески и угла поворота маховика. В каждой рабочей точке опорное приложение стимулирует систему подвески Simscape Multibody с помощью сигнала частотного диапазона от 0,1 до 2 Гц. Затем виртуальная испытательная лаборатория использует данные для согласования вертикальной силы подвески, угла развала и угла носка с гауссовой моделью процесса (GPM) в зависимости от состояния подвески. Наконец, эталонное приложение использует GPM для генерации параметров подвески для блоков подвески. |
Сравнение сопоставленных ответов и ответов приостановки Simscape | Сравните отображенную подвеску с результатами подвески Simscape Multibody. |
Виртуальная испытательная лаборатория стимулирует подвеску Simscape Multibody в одной рабочей точке, а затем сравнивает реакцию на отображенную подвеску. |
Виртуальная испытательная лаборатория использует панель инструментов калибровки на основе модели для подгонки моделей угла развала, угла носка и откоса вертикальной силы для данных. Затем виртуальная тестовая лаборатория использует ответные модели для генерации параметров подвески для блоков подвески.
Используйте поле Файл электронной таблицы для предоставления файла данных. По умолчанию ссылочное приложение имеет KandCTestData.xlsx содержащий требуемые данные. В таблице приведены требования к файлам данных для создания калиброванных таблиц.
| Данные | Описание | Требования к данным для создания сопоставленных таблиц приостановки |
|---|---|---|
| z | Высота подвески по вертикальной оси, в м | Необходимый |
| zdot | Точки останова по высоте подвеса вертикальной оси, м/с | Необходимый |
| ул. | Угол поворота, в рад | Необходимый |
| Fz | Усилие подвески по вертикальной оси, в Н | Необходимый |
| приблизительно | Угол развала, в рад | Необходимый |
| ta | Угол носка, в рад | Необходимый |
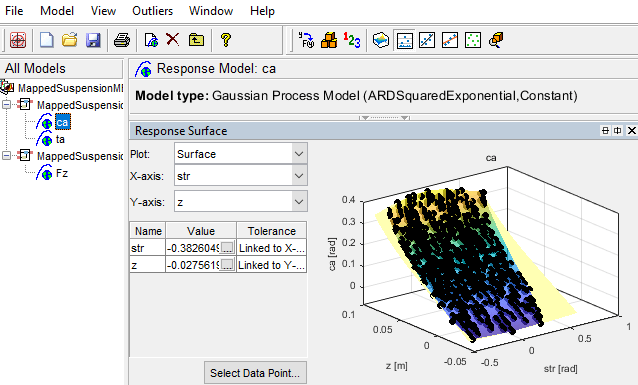
Щелкните Создать калибровку сопоставленной подвески (Generate mapped suspension calibration), чтобы создать модели поверхности отклика в панели инструментов калибровки на основе модели (Model-Based Calibr
После завершения процесса откроется браузер модели. Вы можете просмотреть угол развала, ca, угол носка, ta и вертикальную силу, Fz, модель отклика подходит для данных.
Щелкните Применить калибровку к сопоставленной модели подвески. Виртуальная тестовая лаборатория использует ответные модели для получения калиброванных данных о подвеске и точках останова.
Нажмите кнопку ОК, чтобы обновить рабочее пространство модели и блоки подвески.
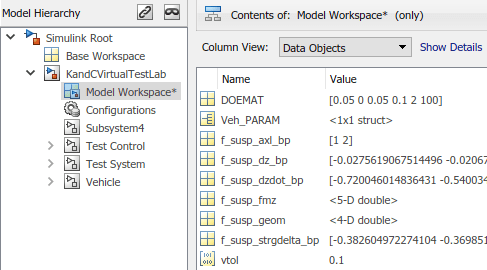
В обозревателе моделей можно просмотреть сгенерированные параметры подвески.
| Параметр | Переменная рабочего пространства модели | Описание |
|---|---|---|
Точки останова оси, f_susp_axl_bp |
| Точки останова оси, P, безразмерные. |
Точки останова подвески по вертикальной оси, f_susp_dz_bp |
| Точки останова подвески по вертикальной оси, М, в м. |
Точки останова по высоте подвеса вертикальной оси, f_susp_dzdot_bp |
| Точки останова по высоте подвеса вертикальной оси, Н, в м/с. |
Сила подвески вертикальной оси и отклики момента, f_susp_fmz |
|
|
Ответы геометрии подвески, f_susp_geom |
|
|
Точки останова угла рулевого управления, f_susp_strgdelta_bp |
| Точки останова угла поворота, O, в рад. |
Виртуальная испытательная лаборатория использует панель калибровочных инструментов на основе модели для разработки последовательности Sobol экспериментов (DoE) в рабочих точках высоты подвески и угла поворота маховика. В каждой рабочей точке опорное приложение стимулирует систему подвески Simscape Multibody с помощью сигнала частотного диапазона от 0,1 до 2 Гц. Затем виртуальная испытательная лаборатория использует данные для согласования вертикальной силы подвески, угла развала и угла носка с гауссовой моделью процесса (GPM) в зависимости от состояния подвески. Наконец, эталонное приложение использует GPM для генерации параметров подвески для блоков подвески.
Испытательная лаборатория выполняет подвесную систему с настройками DOE, содержащимися в DOEMAT массив. Для просмотра DOEMAT откройте Обозреватель моделей.
| Элемент | Описание |
|---|---|
| Высота подвески |
| Угол маховика |
| Амплитуда сигнала Chirp |
| Начальная частота чирпа |
| Конечная частота чирпа |
| Время моделирования для завершения частотного диапазона чирп-сигнала |
Генерация может занять время, чтобы запустить и замедлить другие компьютерные процессы. Просмотр хода выполнения в окне MATLAB ®.
В обозревателе моделей можно просмотреть сгенерированные параметры подвески.
| Параметр | Переменная рабочего пространства модели | Описание |
|---|---|---|
Точки останова оси, f_susp_axl_bp |
| Точки останова оси, P, безразмерные. |
Точки останова подвески по вертикальной оси, f_susp_dz_bp |
| Точки останова подвески по вертикальной оси, М, в м. |
Точки останова по высоте подвеса вертикальной оси, f_susp_dzdot_bp |
| Точки останова по высоте подвеса вертикальной оси, Н, в м/с. |
Сила подвески вертикальной оси и отклики момента, f_susp_fmz |
|
|
Ответы геометрии подвески, f_susp_geom |
|
|
Точки останова угла рулевого управления, f_susp_strgdelta_bp |
| Точки останова угла поворота, O, в рад. |
Виртуальная испытательная лаборатория стимулирует подвеску Simscape Multibody в одной рабочей точке, а затем сравнивает реакцию на отображенную подвеску.
Чтобы стимулировать модель подвески Simscape Multibody, испытательная лаборатория использует настройки DOE, содержащиеся в DOEMAT массив.
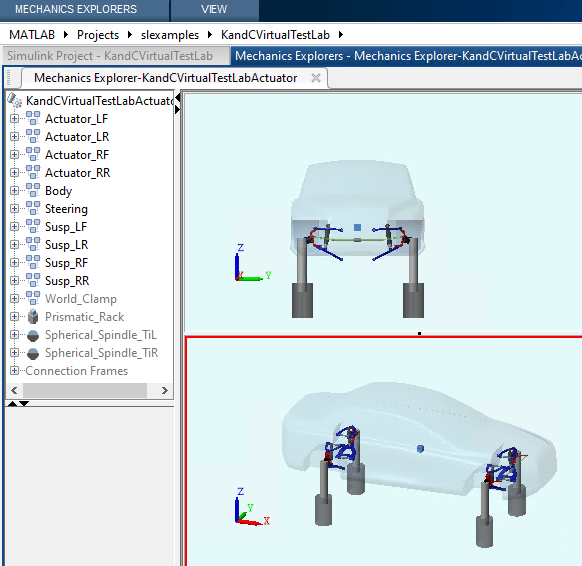
Во время моделирования для просмотра системы подвески перейдите на вкладку Исследователи Mechanics.
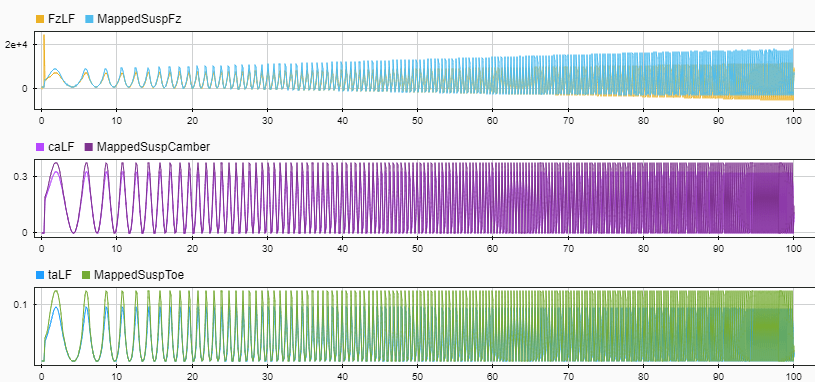
После завершения моделирования используйте инспектор данных моделирования, чтобы сравнить отклик системы подвески для отображенной модели подвески и модели подвески Simscape Multibody. Например, сравните вертикальную силу, угол развала и отклики угла носка.
Независимая приостановка - карта | Подвеска сплошной оси - карта
