Вычислите метрическую матрицу угла и найдите углы на изображениях
Инструментарий для компьютерного зрения/Анализ и усовершенствование
Блок обнаружения углов находит углы в изображении с помощью определения угла Харриса (Харриса и Стивенса), минимального собственного значения (Ши и Томази) или локального сравнения интенсивности (на основе метода ускоренного тестирования сегментов (FAST) Ростена и Драммонда). Блок находит углы на изображении на основе пикселов, имеющих наибольшие угловые метрики.
Способ определяет, что пиксель является возможным углом, если он имеет либо N смежных действительных ярких окружающих пикселей, либо N смежных темных окружающих пикселей.
Предположим, что p - рассматриваемый пиксель, а j - один из пикселей, окружающих Р. Местоположения других окружающих пикселей обозначены затененными областями на следующем рисунке. Закрашенные области на этом рисунке обозначают местоположения других окружающих пикселей.
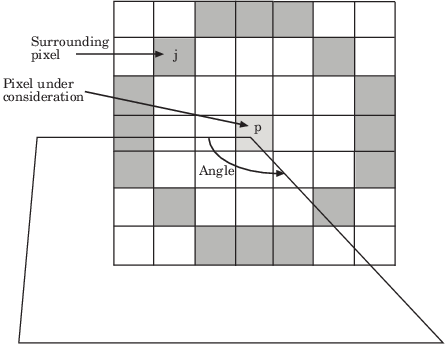
и - интенсивности пикселей p и j соответственно. Пиксель j является допустимым ярким окружающим пикселем, если . Аналогично, пиксель j является действительным темным окружающим пикселем, если . В этих уравнениях T - это значение, указанное для параметра Порог сравнения интенсивности (Intensity comparison threshold).
Блок повторяет этот процесс, чтобы определить, имеет ли блок N смежных действительных окружающих пикселей. Значение N связано со значением, заданным для параметра Максимальный угол (Maximum angle), который считается угловым (в градусах), как показано в этой таблице.
Количество допустимых окружающих пикселов и углов
| Количество допустимых окружающих пикселей | Угол (градусы) |
|---|---|
| 15 | 22.5 |
| 14 | 45 |
| 13 | 67.5 |
| 12 | 90 |
| 11 | 112.5 |
| 10 | 135 |
| 9 | 157.5 |
После того как блок определяет, что пиксель является возможным углом, он вычисляет свою угловую метрику, используя следующее уравнение:
∑j:Ij≥Ip+T'Ip−Ij|−T,∑j:Ij≤Ip−T'Ip−Ij|−T)
[1] Харрис, C. и М Стивенс. «Комбинированный детектор углов и кромок». Материалы четвертой конференции Alvey Vision, 147-151. Август 1988 года.
[2] Ши, Дж. и К. Томази. «Хорошие возможности для отслеживания». Материалы Конференции IEEE по компьютерному зрению и распознаванию образов, 593-600. Июнь 1994 года.
[3] Ростен, Э. и Т. Драммонд. «Слияние точек и линий для высокопроизводительного отслеживания». Материалы Международной конференции IEEE по компьютерному зрению Том 2, 1508-1511. Октябрь 2005 года.
На этих диаграммах показаны типы данных, используемые в блоке обнаружения углов для сигналов с фиксированной точкой. Эти диаграммы применимы только к методам определения угла Харриса и минимального собственного значения.
В следующей таблице представлены переменные, использованные на предыдущих диаграммах.
| Имя переменной | Определение |
|---|---|
| IN_DT | Тип входных данных |
| MEM_DT | Тип данных памяти |
| OUT_DT | Тип выходных данных метрики |
| COEF_DT | Тип данных коэффициентов |

