(Не рекомендуется) Карта различий между стереоизображениями
disparity не рекомендуется. Использовать disparityBM или disparitySGM вместо этого. Дополнительные сведения см. в разделе Вопросы совместимости
disparityMap = disparity(I1,I2)disparityMap, для пары стереоизображений, I1 и I2.
disparityMap = disparity(I1,I2,Name,Value)Name,Value аргументы пары.
Загрузите изображения и преобразуйте их в градации серого.
I1 = imread('scene_left.png'); I2 = imread('scene_right.png');
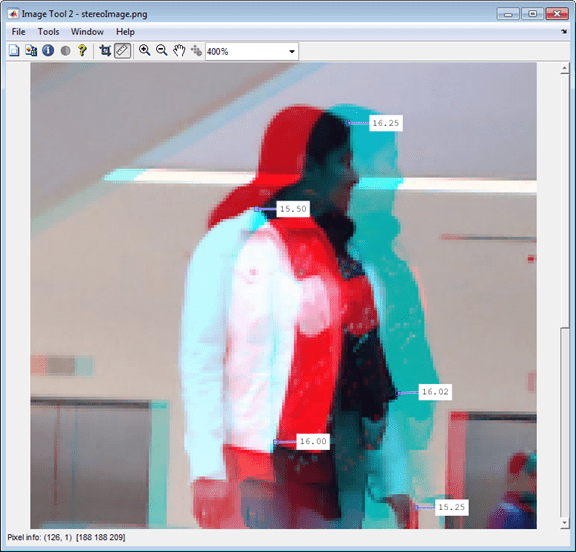
Показать стереоанаглиф. Используйте красно-голубые стерео очки для просмотра изображения в 3-D.
figure
imshow(stereoAnaglyph(I1,I2));
title('Red-cyan composite view of the stereo images');
Вычислите карту несоответствия.
disparityRange = [-6 10]; disparityMap = disparity(rgb2gray(I1),rgb2gray(I2),'BlockSize',... 15,'DisparityRange',disparityRange);
Просмотрите карту несоответствий. Для лучшей визуализации используйте диапазон диспаритетов в качестве диапазона отображения для imshow.
figure
imshow(disparityMap,disparityRange);
title('Disparity Map');
colormap(gca,jet)
colorbar
I1 - Входное изображение 1Входное изображение, на которое ссылается I1 соответствие камере 1, определенный в 2-х оттенках серого. Стереоизображение, I1 и I2, должны быть исправлены таким образом, чтобы соответствующие точки располагались на одних и тех же строках. Вы можете выполнить это исправление с помощью rectifyStereoImages функция.
Можно повысить скорость функции, задав класс I1 и I2 кому uint8и количество столбцов, которые должны быть разделены на 4. Входные изображения I1 и I2 должно быть реальным, конечным и непроверенным. Они должны быть одного класса.
Типы данных: uint8 | uint16 | int16 | single | double
I2 - Входное изображение 2Входное изображение, на которое ссылается I2 соответствие камере 2, определенный в 2-х оттенках серого. Входные изображения должны быть исправлены таким образом, чтобы соответствующие точки располагались в одних и тех же строках. Можно повысить скорость функции, задав класс I1 и I2 кому uint8и количество столбцов, которые должны быть разделены на 4. Входные изображения I1 и I2 должно быть реальным, конечным и непроверенным. Они должны быть одного класса.
Типы данных: uint8 | uint16 | int16 | single | double
Укажите дополнительные пары, разделенные запятыми Name,Value аргументы. Name является именем аргумента и Value - соответствующее значение. Name должен отображаться внутри кавычек. Можно указать несколько аргументов пары имен и значений в любом порядке как Name1,Value1,...,NameN,ValueN.
'Method','BlockMatching', задает 'Method' для свойства должно быть установлено значение 'BlockMatching'.'Method' - Алгоритм оценки различий'SemiGlobal' (по умолчанию) | 'BlockMatching'Алгоритм оценки несоответствия, указанный как разделенная запятыми пара, состоящая из 'Method«и либо» 'BlockMatching' или 'SemiGlobal'. Функция несоответствия реализует базовые алгоритмы сопоставления блоков [1] и сопоставления полуглобальных блоков [3]. В 'BlockMatching' в способе функция вычисляет несоответствие путем сравнения суммы абсолютных разностей (SAD) каждого блока пикселей в изображении. В 'SemiGlobal' способ согласования, причем функция дополнительно форсирует аналогичное рассогласование на соседних блоках. Это дополнительное ограничение приводит к более полной оценке несоответствия, чем в 'BlockMatching' способ.
Алгоритмы выполняют следующие шаги:
Вычислите меру контрастности изображения с помощью фильтра Собеля.
Вычислить несоответствие для каждого пикселя в I1.
Отметить элементы карты несоответствия, disparityMap, которые не были вычислены надежно. Функция использует -realmax('single') для маркировки этих элементов.
'DisparityRange' - Диапазон различий0 64] (по умолчанию) | двухэлементный вектор Диапазон различий, указанный как разделенная запятыми пара, состоящая из 'DisparityRangeи двухэлементный вектор. Двухэлементный вектор должен иметь формат [MinDisparity, MaxDisparity]. Оба элемента должны быть целыми и могут быть отрицательными. Значения MinDisparity и MaxDisparity должны находиться в диапазоне [-ширина изображения, ширина изображения]. Разница между MaxDisparitity и MinDisparity должна быть разделена на 16. DisparityRange должно быть реальным, конечным и непроверенным. При использовании камеры I1 находился справа от камеры, используемой для съемки I2, то MinDisparity должен быть отрицательным.
Диапазон различий зависит от расстояния между двумя камерами и расстояния между камерами и интересующим объектом. Увеличить DisparityRange когда камеры находятся далеко друг от друга или объекты находятся близко к камерам. Чтобы определить разумное несоответствие конфигурации, отобразите стереоанаглиф входных изображений в imtool и используйте инструмент «Расстояние» для измерения расстояний между парами соответствующих точек. Измените значение MaxDisparitity, чтобы оно соответствовало измерению.
'BlockSize' - Размер квадратного блока15 (по умолчанию) | нечетное целое числоКвадратный размер блока, указанный как разделенная запятыми пара, состоящая из 'BlockSize'и нечетное целое число в диапазоне [5255]. Это значение задает ширину квадратного блока. Функция использует квадратный блок пикселей для сравнения между I1 и I2. BlockSize должно быть реальным, конечным и непроверенным.
'ContrastThreshold' - Диапазон пороговых значений контрастности0.5 (по умолчанию) | скалярное значениеПороговый диапазон контрастности, указанный как разделенная запятыми пара, состоящая из 'ContrastThreshold'и скалярное значение в диапазоне (0,1]. Порог контрастности определяет приемлемый диапазон значений контрастности. Увеличение этого параметра приводит к тому, что меньшее количество пикселей помечается как ненадежные.ContrastThreshold должно быть реальным, конечным и непроверенным.
'UniquenessThreshold' - Минимальное значение уникальности15 (по умолчанию) | неотрицательное целое числоМинимальное значение уникальности, указанное как разделенная запятыми пара, состоящая из 'UniquenessThreshold'и неотрицательное целое число. Увеличение этого параметра приводит к тому, что функция помечает больше пикселей ненадежными. Когда значение уникальности для пикселя низкое, расхождение, вычисленное для него, является менее надежным. Установка порогового значения 0 отключает пороговое значение уникальности. UniquenessThreshold должно быть реальным, конечным и непроверенным.
Функция определяет уникальность как отношение оптимальной оценки рассогласования и менее оптимальной оценки рассогласования. Например:
| Пусть К - наилучшая оценочная разностность, а V - соответствующее значение SAD (сумма абсолютных разностей). |
| Рассмотрим V как наименьшее значение SAD во всем диапазоне различий, а v как наименьшее значение SAD во всем диапазоне различий, исключая K, K-1 и K + 1. |
Если v < V * (1+0.01*UniquenessThreshold), то функция отмечает несоответствие для пикселя как ненадежное. |
'DistanceThreshold' - Максимальное расстояние для проверки изображения слева направо[] (отключено) (по умолчанию) | неотрицательное целое числоМаксимальное расстояние для проверки изображения слева направо между двумя точками, указанное как разделенная запятыми пара, состоящая из 'DistanceThreshold'и неотрицательное целое число. Увеличение этого параметра приводит к тому, что меньшее количество пикселей помечается как ненадежные. И наоборот, при уменьшении значения порога расстояния повышается надежность карты расхождений. Можно задать для этого параметра пустую матрицу [] чтобы отключить его. DistanceThreshold должно быть реальным, конечным и непроверенным.
Порог расстояния определяет максимальное расстояние между точками в I1 и та же самая точка, найденная из I2. Функция находит расстояние и отмечает пиксель следующим образом:
| Пусть p1 - точка в I1 изображения. |
| Шаг 1: Функция ищет наилучшее совпадение точки p1 в I2 изображения (проверка слева направо) и находит точку p2. |
| Шаг 2: Функция ищет наилучшее совпадение p2 в I1 изображения (проверка справа налево) и находит точку p3. |
Если поиск возвращает расстояние между p1 и p3 больше, чем DistanceThreshold, функция отмечает несоответствие для точки p1 как ненадежное. |
'TextureThreshold' - Минимальный порог текстуры0.0002 (по умолчанию) | скалярное значениеМинимальный порог текстуры, указанный как пара, разделенная запятыми, состоящая из 'TextureThresholdи скалярное значение в диапазоне [0, 1). Порог текстуры определяет минимальное значение текстуры для того, чтобы пиксель был надежным. Чем ниже текстура для блока пикселей, тем менее надежны вычисленные различия для пикселей. Увеличение этого параметра приводит к тому, что большее количество пикселей помечается как ненадежные. Можно задать для этого параметра значение 0 чтобы отключить его. Этот параметр применяется только при установке Method кому 'BlockMatching'.
Текстура пикселя определяется как сумма насыщенного контраста, вычисленного по BlockSizeоколо-BlockSize окно вокруг пикселя. Функция считает несоответствие, вычисленное для пикселя, ненадежным и отмечает его, когда текстура падает ниже значения, определяемого:
Текстура < X *TextureThreshold * BlockSize2
I1 и I2.
TextureThreshold должно быть реальным, конечным и непроверенным.
Если результирующая карта несоответствия выглядит шумно, попробуйте изменить DisparityRange. Диапазон различий зависит от расстояния между двумя камерами и расстояния между камерами и интересующим объектом. Увеличить DisparityRange когда камеры находятся далеко друг от друга или объекты находятся близко к камерам. Чтобы определить разумное несоответствие конфигурации, отобразите стереоанаглиф входных изображений в imtool и используйте инструмент «Расстояние» для измерения расстояний между парами соответствующих точек. Измените значение MaxDisparitity, чтобы оно соответствовало измерению.
[1] Конолиге, К., Small Vision Systems: Hardware and Implementation, материалы VIII Международного симпозиума по робототехническим исследованиям, стр. 203-212, 1997.
[2] Брэдски, Г. и А. Келер, Learning OpenCV: Computer Vision with the OpenCV Library, O'Reilly, Sebastopol, CA, 2008.
[3] Hirschmuller, H., Точная и эффективная стереообработка путем полуглобального согласования и взаимной информации, Международная конференция по компьютерному зрению и распознаванию образов, 2005.
estimateCameraParameters | estimateUncalibratedRectification | reconstructScene | rectifyStereoImages | Калибратор стереокамеры
