Вычислить карту различий с помощью полуглобального сопоставления
disparityMap = disparitySGM(I1,I2)I1 и I2, с использованием метода полуглобального сопоставления (SGM). Дополнительные сведения об исправлении стереоизображений см. в разделе Исправление изображений.
disparityMap = disparitySGM(I1,I2,Name,Value)
Загрузите исправленное изображение стереопары.
I1 = imread('rectified_left.png'); I2 = imread('rectified_right.png');
Создайте стереоанаглиф выпрямленного изображения стереопары и выведите его на экран. Изображение можно просмотреть в 3-D с помощью красно-голубых стереоочков.
A = stereoAnaglyph(I1,I2);
figure
imshow(A)
title('Red-Cyan composite view of the rectified stereo pair image')
Преобразование исправленных входных цветных изображений в изображения в оттенках серого.
J1 = rgb2gray(I1); J2 = rgb2gray(I2);
Вычислите карту различий с помощью полуглобального сопоставления. Укажите диапазон различий как [0, 48] и минимальное значение уникальности как 20.
disparityRange = [0 48]; disparityMap = disparitySGM(J1,J2,'DisparityRange',disparityRange,'UniquenessThreshold',20);
Просмотрите карту несоответствий. Установите для диапазона отображения то же значение, что и для диапазона несоответствия.
figure imshow(disparityMap,disparityRange) title('Disparity Map') colormap jet colorbar

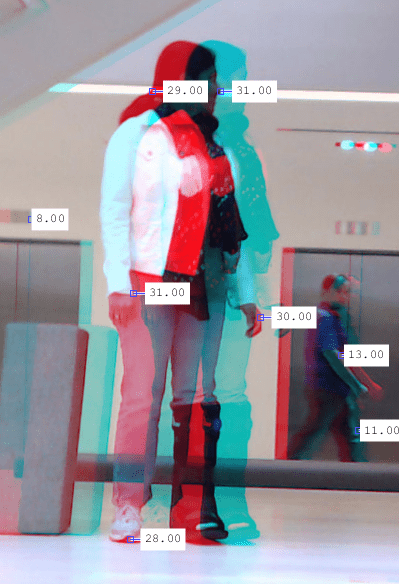
Диапазон различий должен быть выбран таким образом, чтобы охватить минимальную и максимальную величину горизонтального сдвига между соответствующими пикселями в выпрямленном изображении стереопары. Можно определить приблизительные значения горизонтального сдвига из стереоанаглифа изображения стереопары. Вычислите стереоанаглиф исправленных изображений с помощью stereoAnaglyph функция. Отображение стереоанаглифа в средстве просмотра изображений с помощью imtool функция. Чтобы измерить величину горизонтального сдвига между соответствующими точками на изображении стереопары, выберите команду «Измерить расстояние» в меню «Сервис» в окне «Просмотр изображений». Выберите минимальное и максимальное значения диспаратности для диапазона диспаратности на основе этого измерения.
Например, этот рисунок отображает стереоанаглиф выпрямленного изображения стереопары и значения горизонтального сдвига, измеренные между соответствующими точками в изображении стереопары. Минимальное и максимальное значения сдвига вычисляются как 8 и 31 соответственно. На основе этих значений диапазон различий может быть выбран как [0, 48].
[1] Хиршмуллер, Н. «Точная и эффективная стереообработка путем полуглобального согласования и взаимной информации». В материалах Конференции IEEE по компьютерному зрению и распознаванию образов (CVPR), стр. 807-814. Сан-Диего, Калифорния: IEEE, 2005.
