Хранить видеопостроки и возвращать соседние пикселы
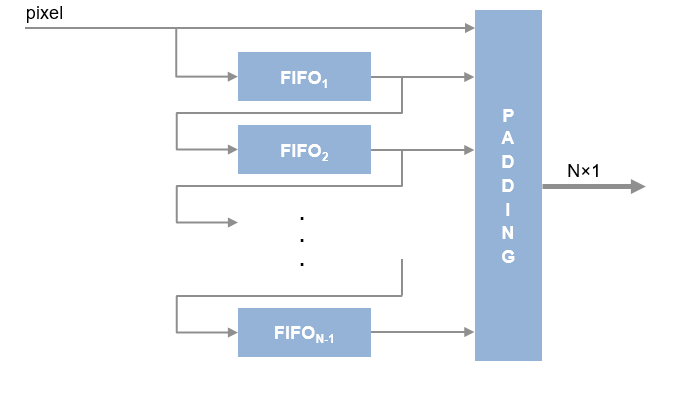
visionhdl.LineBuffer Система object™ выбирает пиксели окрестности из данных потокового изображения. Он управляет сигналами управления видео и дополнением краев и конвейерно предназначен для высокоскоростного видео. Объект выводит один столбец окрестности за один раз. Чтобы составить окрестности для дальнейшей обработки, используйте shiftEnable сигнал для сохранения выходных столбцов, включая заполнение, в сдвиговом регистре. Этот объект позволяет совместно использовать ресурсы буфера линий, когда проект выполняет несколько операций в одной окрестности.
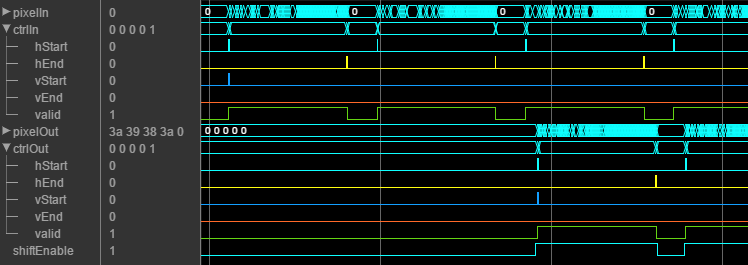
Следующая форма сигнала показывает visionhdl.LineBuffer объект возвращает столбцы 5 на 1 пиксел, составляющие окрестность 5 на 5. Показанный временной интервал находится в начале (верхнем левом углу) входного кадра. Вывод начинается после того, как объект сохранил два (floor(M/2)) строки и получает начало третьей строки. shiftEnable сигнал подается на два цикла раньше выходного ctrl.valid сигнал, указывающий, что первые два (floor(M/2)) столбцы являются исключительно заполняющими пикселями. Аналогично, shiftEnable остается на высоком уровне в течение двух дополнительных циклов в конце линии.
Чтобы извлечь области скользящего пикселя из видеопотока, выполните следующие действия.
Создать visionhdl.LineBuffer и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
linemem = visionhdl.LineBuffer( возвращает объект System буфера строки. Задайте свойства, используя пары имя-значение. Заключите каждое имя свойства в отдельные кавычки. Name,Value)
linemem = visionhdl.LineBuffer('NeighborhoodSize',[5 5])[ возвращает вектор столбца пикселей в ядре и сопутствующие управляющие сигналы.pixelOut,ctrlOut,shiftEnable] = lineMem(pixelIn,ctrlIn)
Этот объект использует потоковый пиксельный интерфейс со структурой для сигналов управления кадрами. Этот интерфейс позволяет объекту работать независимо от размера и формата изображения и подключаться к другим объектам Vision HDL Toolbox™. Объект принимает и возвращает значение скалярного пикселя и управляющие сигналы в виде структуры, содержащей пять сигналов. Сигналы управления указывают достоверность каждого пикселя и его местоположение в кадре. Чтобы преобразовать матрицу пикселей в поток пикселей и управляющие сигналы, используйте visionhdl.FrameToPixels объект. Полное описание интерфейса см. в разделе Потоковый пиксельный интерфейс.
Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
visionhdl.LineBuffer Система object™ сохраняет видеолинии и возвращает скользящие области для операций с изображениями на основе ядра. В этом примере вычисляется среднее значение для каждого района.
Импорт источника изображения и настройка объектов сериализатора и десериализатора.
frmOrig = imread('rice.png'); frmActivePixels = 48; frmActiveLines = 32; frmIn = frmOrig(1:frmActiveLines,1:frmActivePixels); figure imshow(frmIn,'InitialMagnification',300) title 'Input Image' frm2pix = visionhdl.FrameToPixels(... 'NumComponents',1,... 'VideoFormat','custom',... 'ActivePixelsPerLine',frmActivePixels,... 'ActiveVideoLines',frmActiveLines,... 'TotalPixelsPerLine',frmActivePixels+10,... 'TotalVideoLines',frmActiveLines+10,... 'StartingActiveLine',6,... 'FrontPorch',5); [~,~,numPixPerFrm] = getparamfromfrm2pix(frm2pix); pix2frm = visionhdl.PixelsToFrame(... 'NumComponents',1,... 'VideoFormat','custom',... 'ActivePixelsPerLine',frmActivePixels,... 'ActiveVideoLines',frmActiveLines);

Запишите функцию, которая создает и вызывает системный object™. Объект одновременно возвращает один столбец окрестности. Для сохранения столбцов используйте сдвиговый регистр. Затем вычислите среднее значение пиксельной окрестности. Из этой функции можно создать ЛПВП.
Примечание.Синтаксис этого объекта выполняется только в R2016b или более поздних версиях. При использовании более ранней версии замените каждый вызов объекта эквивалентным step синтаксис. Например, заменить myObject(x) с step(myObject,x).
function [pixOut,ctrlOut] = AvgFilter(pixIn,ctrlIn)
%AvgFilter
% Calculates the average pixel value for each 3x3 kernel
% pixIn and pixOut are scalar uint8 pixel values.
% ctrlIn and ctrlOut are structures that contain control signals associated
% with the pixel.
% You can generate HDL code from this function.
persistent linemem;
if isempty(linemem)
linemem = visionhdl.LineBuffer;
end
persistent dataShiftReg;
if isempty(dataShiftReg)
% use typeof(pixIn)?
dataShiftReg = fi(zeros(3,3),0,8,0);
end
% HDL code gen does not support arrays of structs
persistent controlShiftReg1;
persistent controlShiftReg2;
persistent controlShiftReg3;
if isempty(controlShiftReg1)
controlShiftReg1 = pixelcontrolstruct();
controlShiftReg2 = pixelcontrolstruct();
controlShiftReg3 = pixelcontrolstruct();
end
persistent div9;
if isempty(div9)
div9 = fi(1/9,0,12,15);
end
% Advance shift registers
dataShiftReg(:,2:end) = dataShiftReg(:,1:end-1);
controlShiftReg3 = controlShiftReg2;
controlShiftReg2 = controlShiftReg1;
% Fetch next column
[dataShiftReg(:,1),controlShiftReg1] = linemem(fi(pixIn,0,8,0),ctrlIn);
% Calculate the average over the neighborhood
pixOut = uint8((sum(dataShiftReg(:),'native')).*div9);
ctrlOut = controlShiftReg3;
end
Обработка изображения путем вызова функции для каждого пикселя.
pixOutVec = ones(numPixPerFrm,1,'uint8'); ctrlOutVec = repmat(pixelcontrolstruct(false,false,false,false,false),numPixPerFrm,1); [pixInVec,ctrlInVec] = frm2pix(frmIn); for p = 1:numPixPerFrm [pixOutVec(p),ctrlOutVec(p)] = AvgFilter(pixInVec(p),ctrlInVec(p)); end
Повторно создайте отфильтрованный кадр.
[frmOut,frmValid] = step(pix2frm,pixOutVec,ctrlOutVec); if frmValid figure; imshow(frmOut,'InitialMagnification',300) title 'Output Image' end

Объект хранит M - 1 строк допустимых пикселей, как указано размером окрестности. Он добавляет биты заполнения на краю кадра. Объект возвращает первый выходной столбец, как только он может сформировать полный столбец окрестности, что происходит в начале входной строки floor(M/2).