Идеальная автоматизированная механическая коробка передач
Блок-набор силовых агрегатов/трансмиссия/системы трансмиссии
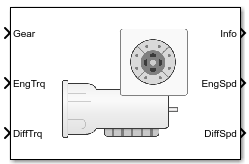
Блок Automated Manual Transmission реализует идеальную автоматизированную коробку передач (AMT). AMT является механической коробкой передач с дополнительными приводами и электронным модулем управления (ECU) для регулирования выбора муфты и передачи на основе команд контроллера. Количество передач задается через целочисленный вектор с соответствующими передаточными числами, инерцией, вязким демпфированием и коэффициентами эффективности. Сцепление и скорости сцепления синхронизации являются линейными и регулируемыми.
Используйте блок для:
Величина мощности и крутящего момента
Определение влияния передаточного числа на расход топлива и эффективность
Чтобы определить скорость вращательного вала и крутящий момент реакции, блок Automated Manual Transmission вычисляет:
Блокировка сцепления и трение сцепления
Заблокированная динамика вращения
Разблокированная динамика вращения
Чтобы задать расчет эффективности блоков, для Efficiency factors выберите одну из этих опций.
| Настройка | Реализация блока |
|---|---|
Gear only | Эффективность, определяемый из интерполяционной таблицы 1D, которая является функцией передачи. |
Gear, input torque, input speed, and temperature | Эффективность, определенная из интерполяционной таблицы 4D, которая является функцией:
|
AMT обеспечивает непрерывный крутящий момент приводного вала путем управления сигналами давления от муфты. Если вы выбираете Control type параметр Ideal integrated controllerблок генерирует идеализированные сигналы давления в муфте. Чтобы использовать свои собственные сигналы управления сцеплением, выберите Control type параметр External control.
Основываясь на условии блокировки муфты, блок реализует одну из этих моделей трения.
| Если | Условие муфты | Модель трения |
|---|---|---|
| Незапертый | ||
| Запертый |
Tf = Ts |
В уравнениях используются эти переменные.
| ωt | Выход вала |
| ωi | Входная скорость вала привода |
| ωd | Скорость приводного вала |
Вязкое демпфирование | |
| Fc | Приложенная сила сцепления |
| N | Зацепленная передача |
Фрикционный крутящий момент | |
Кинетический фрикционный крутящий момент | |
Статический крутящий момент трения | |
Эффективный радиус сцепления | |
Внешний радиус кольцевого диска | |
Внутренний радиус кольцевого диска | |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
Чтобы смоделировать динамику вращения, когда муфта заблокирована, блок реализует эти уравнения.
Блок определяет входной крутящий момент, Ti, через дифференциацию.
В уравнениях используются эти переменные.
| ωi | Входная скорость вала привода |
| ωd | Скорость приводного вала |
| N | Зацепленная передача |
| bN | Вязкое демпфирование привода |
| JN | Инерция зацепления с шестерней |
| ηN | Зацепленная зубчатая эффективность |
| Td | Крутящий момент на валу привода |
| Ti | Приложенный входной крутящий момент |
Чтобы смоделировать динамику вращения, когда муфта разблокирована, блок реализует это уравнение.
где:
| ωd | Скорость приводного вала |
| N | Зацепленная передача |
| bN | Вязкое демпфирование привода |
| JN | Инерция зацепления с шестерней |
| Td | Крутящий момент на валу привода |
| Ti | Приложенный входной крутящий момент |
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Степень Engine | Peng | |
PwrDiffrntl | Дифференциальная степень | Pdiff | |||
|
| PwrEffLoss | Механические потери степени | Peffloss | ||
PwrDampLoss | Механические потери демпфирования | Pdamploss | |||
PwrCltchLoss | Потеря степени муфты | Pmech | При блокировке: При разблокировке: | ||
|
| PwrStoredTrans | Изменение скорости во вращательной кинетической энергии | Pstr | При блокировке: При разблокировке: | |
В уравнениях используются эти переменные.
| bN | Вязкое демпфирование привода |
| JN | Инерция вращения зацепления с шестерней |
| Jin | Инерция вращения маховика |
| ηN | Зацепленная зубчатая эффективность |
| N | Передаточное число в зацеплении |
| Ti | Приложенный входной крутящий момент, обычно от коленчатого вала двигателя или демпфера маховика с двойной массой |
| Td | Приложенный крутящий момент нагрузки, обычно от дифференциального или приводного вала |
| ωd | Начальная скорость вращения вала на входе |
| ωi, ώi | Приложенные угловая скорость и ускорение вала привода |
AMT Controller | Continuously Variable Transmission | Dual Clutch Transmission | Ideal Fixed Gear Transmission

