Суммирующее соединение для межсоединений на основе имен
S = sumblk(formula)
S = sumblk(formula,signalsize)
S = sumblk(formula,signames1,signames2,...)
S = sumblk(formula)S, суммирующего соединения, описанного formula. Вектор символов formula задает уравнение, которое связывает скалярные входные и выходные сигналы S.
S = sumblk(formula,signalsize)signalsize элементы.
S = sumblk(formula,signames1,signames2,...)%) в formula по именам сигналов signames. Количество signames аргументы должны совпадать с количеством псевдонимов в formula. Первый псевдоним в formula заменяется на signames1, второй по signames2и так далее.
|
Уравнение, которое связывает входной и выходной сигналы суммирующей передаточной функции соединения S = sumblk('e = r - y + d')создает суммирующее соединение с входными именами Если вы задаете S = sumblk('v = u + d',2)задает суммирующее соединение с входными именами Можно использовать один или несколько псевдонимов в Псевдонимы применяются, когда вы хотите назвать отдельные значения в векторном сигнале. Псевдонимы также позволяют вам использовать входные или выходные имена существующих моделей. Для примера, если S = sumblk('%e = r - %y',C.InputName,G.OutputName)
|
|
Количество элементов в каждом входном и выходном сигнале По умолчанию: 1 |
|
Имена сигналов для замены одного псевдонима (имя сигнала, начинающееся с Задайте
|
|
Передаточная функция для суммирующего соединения, представленная как MIMO |
Суммирование соединения со скалярными сигналами
Создайте суммирующее соединение на следующем рисунке. Все сигналы являются скалярными.
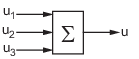
Это суммирующее соединение имеет формулу u = u1 + u2 + u3.
S = sumblk('u = u1+u2+u3');S - передаточная функция (tf) представление суммы u = u1 + u2 + u3. Передаточная функция S получает его входные и выходные имена из формулы.
S.OutputName,S.Inputname
ans =
'u'
ans =
'u1'
'u2'
'u3'Суммирование соединения с векторными сигналами
Создайте суммирующее соединение v = u - d где u,d,v являются векторными сигналами длины 2.
S = sumblk('v = u-d',2);sumblk автоматически выполняет векторное расширение имен сигналов S.
S.OutputName,S.Inputname
ans =
'v(1)'
'v(2)'
ans =
'u(1)'
'u(2)'
'd(1)'
'd(2)'Суммирование соединения с векторными сигналами, которые имеют заданные имена сигналов
Создайте суммирующее соединение
Сигналы alpha и q иметь пользовательские имена, которые не являются вектором расширением единственного имени сигнала. Поэтому используйте псевдоним в формуле, задающей суммирующее соединение.
S = sumblk('e = setpoint - %y + d', {'alpha';'q'});sumblk заменяет псевдоним %y с массивом ячеек {'alpha';'q'}.
S.OutputName,S.Inputname
ans =
'e(1)'
'e(2)'
ans =
'setpoint(1)'
'setpoint(2)'
'alpha'
'q'
'd(1)'
'd(2)'Использовать sumblk в сочетании с connect для взаимосвязи динамических моделей систем и вывода агрегатных моделей для блоков.
