В этом примере показано, как создать сценарий вождения, в котором транспортное средство двигается назад с помощью приложения Driving Scenario Designer. В этом примере вы задаете транспортное средство, который завершает трехточечный поворот.
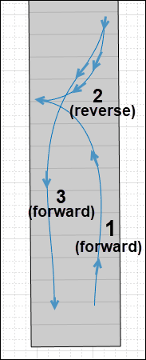
А three-point turn - это базовый маневр вождения для изменения направлений на дороге. Три сегмента поворота с тремя точками состоят из этих движений:
Двигайтесь вперед и поверните к противоположной стороне дороги.
Движение задним ходом с поворотом назад к исходной стороне дороги.
Двигайтесь вперед к противоположной стороне дороги, чтобы завершить изменение направления.
Можно использовать обратные движения для разработки более сложных сценариев для проверки алгоритмов беспилотного вождения.
Откройте приложение Driving Scenario Designer.
drivingScenarioDesigner
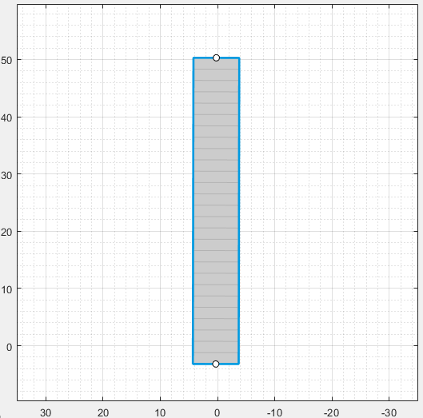
Добавьте прямую дорогу к сценарию. Щелкните правой кнопкой мыши панель Scenario Canvas и выберите Add Road. Удлините дорогу к верхней части полотна до длины около 50 метров. Дважды кликните, чтобы зафиксировать дорогу к холсту.
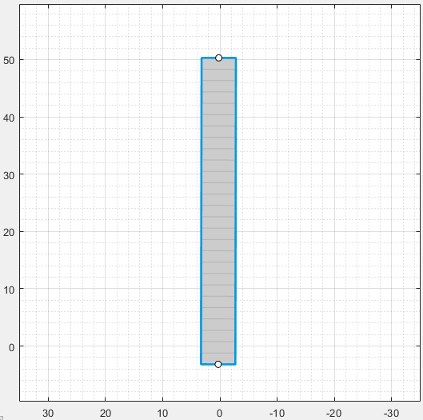
Увеличьте ширину дороги, чтобы оставить достаточно места для транспортного средства, чтобы завершить трехточечный поворот. На левой панели на вкладке Roads увеличьте Width (m) с 6 на 8.
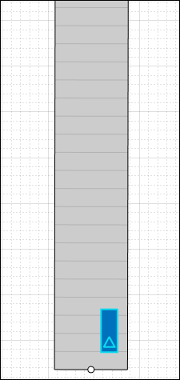
Добавить транспортное средство на дорогу. Щелкните правой кнопкой мыши нижний правый угол дороги и выберите Add Car. Увеличьте изображение транспортного средства и первой половины дороги, где транспортное средство будет выполнять трехточечный поворот.
Задайте траекторию для транспортного средства, чтобы выполнить трехточечный поворот.
Щелкните правой кнопкой мыши транспортное средство и выберите Add Forward Waypoints. Указатель отображает (x, y) положение на холсте и направление движения, которое машина будет перемещать, когда вы задаете путевые точки.
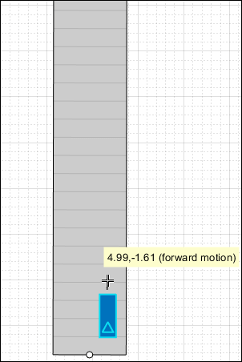
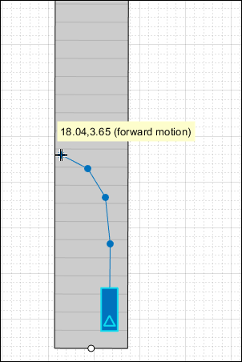
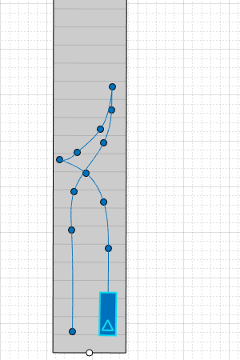
Укажите первый сегмент поворота с тремя точками. Щелкните, чтобы добавить путевые точки, которые поворачивают к левой стороне дороги.
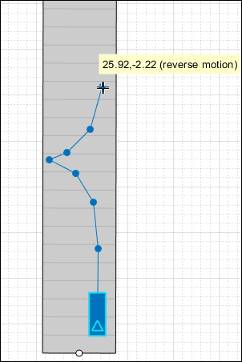
Задайте второй сегмент поворота с тремя точками. Нажмите Ctrl+R, чтобы переключиться на задание противоположных точек пути. Затем щелкните, чтобы добавить путевые точки, которые поворачивают назад к правой стороне дороги.
Задайте третий сегмент поворота с тремя точками. Нажмите Ctrl+F, чтобы переключиться назад к указанию прямых путевых точек. Затем щелкните, чтобы добавить путевые точки, которые поворачивают назад к левой стороне дороги, рядом с первой заданной точкой пути.
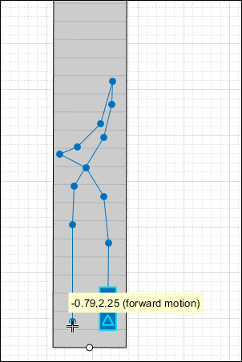
Нажмите Enter, чтобы зафиксировать путевые точки на холсте.
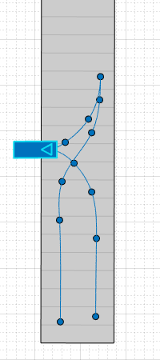
Запустите симуляцию. Чтобы просмотреть направление движения автомобиля, на панели инструментов приложения выберите Display > Show actor pose indicator during simulation.
Когда симуляция выполняется, транспортное средство ненадолго останавливается между каждой точкой в трехточечном повороте. При переключении между движениями вперед и назад в траектории приложение автоматически устанавливает значение v (m/s) в точке пути, где происходит переключение на 0.
Чтобы точно настроить траекторию, установите конкретные углы ориентации рыскания для транспортного средства, чтобы достигнуть в определенных путевых точках. Например, когда транспортное средство начинает свою траекторию обратного движения, предположим, что вы хотите, чтобы транспортное средство находилось точно под углом 90 градусов от того места, где она началась.
Сначала определите идентификатор путевой точки, где транспортное средство начинает это обратное движение, перемещая ваш указатель над этой путевой точкой. Затем в Waypoints, Speeds, Wait Times, and Yaw таблице на левой панели установите yaw (deg) значение соответствующей строки равным 90. Например, если транспортное средство начинает свое обратное движение в точке пути 5, обновите пятую строку yaw (deg) столбца.
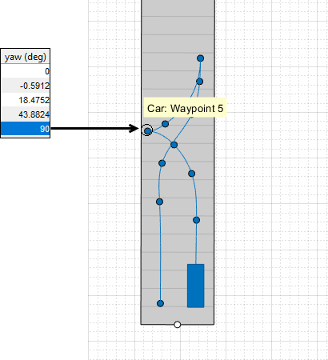
Во время симуляции транспортное средство теперь повернута ровно на 90 степени от места ее начала. Чтобы удалить ранее заданное значение рыскания, щелкните правой кнопкой мыши путевую точку и выберите Restore Default Yaw. Можно также удалить все установленные значения рыскания, щелкнув правой кнопкой мыши по транспортному средству и выбрав Restore Default Yaws.
Для работы с предварительно построенными сценариями, которые используют обратные движения и повороты с заданными значениями рыскания, смотрите предварительно построенные сценарии автономного экстренного торможения (AEB), описанные в Euro NCAP Driving Scenarios in Driving Scenario Designer.
