Проектируйте сценарии вождения, конфигурируйте датчики и генерируйте синтетические данные
Приложение Driving Scenario Designer позволяет вам проектировать синтетические сценарии вождения для проверки своих автономных управлений автомобилем систем.
Используя приложение, вы можете:
Создайте модели дороги и актёра с помощью интерфейса перетаскивания.
Сконфигурируйте датчики зрения, радара, лидара и INS, установленные на автомобиль , оборудованный датчиком. Можно использовать эти датчики для генерации обнаружений контуров актёра и маршрута, данных облака точек и инерционных измерений.
Сценарии вождения нагрузки, представляющие Европейскую программу оценки новых автомобилей (Euro NCAP®) тестовые протоколы [1][2][3] и другие предварительно построенные сценарии.
Импорт OpenDRIVE® дороги и полосы в сценарий вождения. Приложение поддерживает спецификацию формата OpenDRIVE версии 1.4H [4].
Импорт дорожных данных с OpenStreetMap®, HERE HD Live Map[1] , или Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0)[2] веб-сервисы в сценарии вождения.
Для импорта данных из Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) требуется пакет поддержки Automated Driving Toolbox™ Importer for Zenrin Japan Map API 3.0 (Itsumo NAVI 3.0) Service. Для получения информации об установке пакетов поддержки см. раздел «Получение и управление дополнениями».
Экспорт дорожной сети в сценарии вождения в формат файла 1.4H OpenDRIVE.
Экспорт дорожной сети, актёров и траекторий в сценарии вождения в ASAM OpenSCENARIO® 1.0 формат файла.
Экспорт обнаружений синтетических датчиков в MATLAB®.
Сгенерируйте код MATLAB сценария и датчиков, а затем программно измените сценарий и импортируйте его обратно в приложение для дальнейшей симуляции.
Сгенерируйте Simulink® моделируйте из сценария и датчиков и используйте сгенерированные модели, чтобы протестировать слияние датчика или алгоритмы управления транспортным средством.
Дополнительные сведения о приложении см. в разделе Driving Scenario Designer.
MATLAB Toolstrip: На вкладке Apps, в разделе Automotive, щелкните значок приложения.
Командная строка MATLAB: Ввод drivingScenarioDesigner.
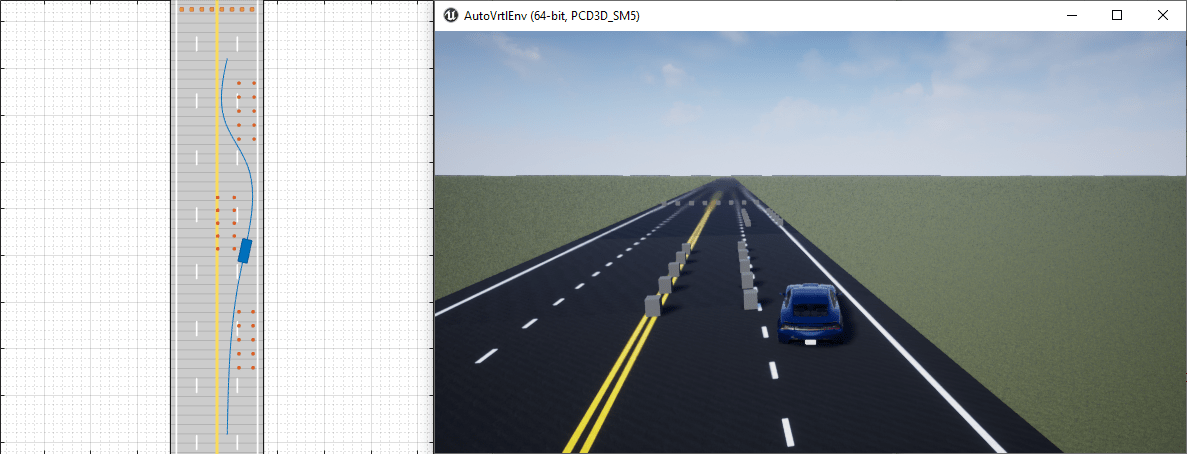
Создайте сценарий вождения транспортного средства, движущегося по изогнутой дороге, и экспортируйте модели дороги и транспортного средства в рабочее пространство MATLAB. Для более подробного примера создания сценария вождения смотрите Создание Сценария Вождения в интерактивном режиме и Генерация Синтетических Данных Датчика.
Откройте приложение Driving Scenario Designer.
drivingScenarioDesigner
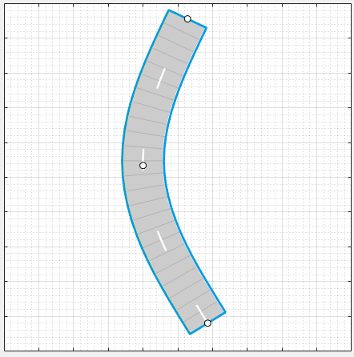
Создайте изогнутую дорогу. На панели инструментов приложения нажмите Add Road. Щелкните внизу холста, удлините путь до середины холста и снова щелкните холст. Удлините путь до верхней части холста и дважды щелкните, чтобы создать дорогу. Чтобы сделать кривую более сложной, щелкните и перетащите центр дороги (открытые круги) или дважды щелкните дорогу, чтобы добавить больше центров дороги.
Добавить полосы к дороге. На левой панели на вкладке Roads разверните раздел Lanes. Установите Number of Lanes значение 2. По умолчанию дорога является односторонней и имеет сплошную разметку маршрута с обеих сторон, чтобы обозначить плечо.
Добавить транспортное средство в один конец дороги. На панели инструментов приложения выберите Add Actor > Car. Затем нажмите на дорогу, чтобы задать начальное положение автомобиля.
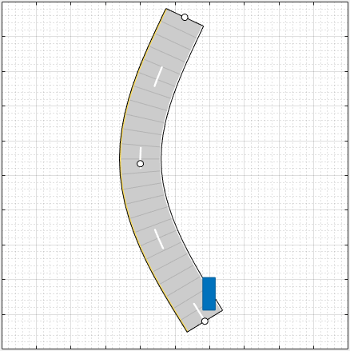
Установите ведущую траекторию автомобиля. Щелкните автомобиль правой кнопкой мыши, выберите Add Forward Waypoints и добавьте путевые точки для прохождения автомобиля. После добавления последней путевой точки нажмите Enter. Машина автоматизируется в направлении первой путевой точки.
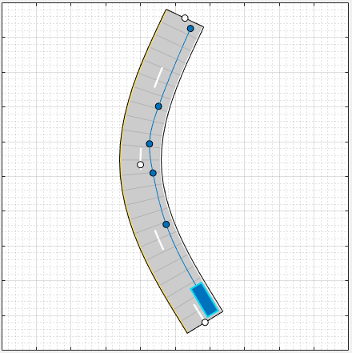
Настройте скорость автомобиля, когда он проходит между путевыми точками. В Waypoints, Speeds, Wait Times, and Yaw таблице на левой панели установите скорость, v (m/s), автомобиль , оборудованный датчиком при входе в каждый сегмент путевой точки. Увеличьте скорость автомобиля для прямых сегментов и уменьшите его скорость для изогнутых сегментов. Для примера траектория имеет шесть точек пути, установите v (m/s) камер равной 30, 20, 15, 15, 20, и 30.
Запустите сценарий и настройте настройки по мере необходимости. Затем нажмите Save > Roads & Actors, чтобы сохранить модели дороги и автомобиля в файл MAT.
Сгенерируйте данные облака точек лидара из предварительно созданного сценария вождения Euro NCAP.
Для получения дополнительной информации о предварительно построенных сценариях, доступных из приложения, смотрите Prebuilt Driving Scenarios in Driving Scenario Designer.
Для получения дополнительной информации о доступных сценариях Euro NCAP, смотрите Euro NCAP Driving Scenarios in Driving Scenario Designer.
Загрузите сценарий автономного экстренного торможения (AEB) Euro NCAP столкновения с ребенком-пешеходом. Во время столкновения точка влияния составляет 50% пути по ширине автомобиля.
path = fullfile(matlabroot,'toolbox','shared','drivingscenario', ... 'PrebuiltScenarios','EuroNCAP'); addpath(genpath(path)) % Add folder to path drivingScenarioDesigner('AEB_PedestrianChild_Nearside_50width.mat') rmpath(path) % Remove folder from path
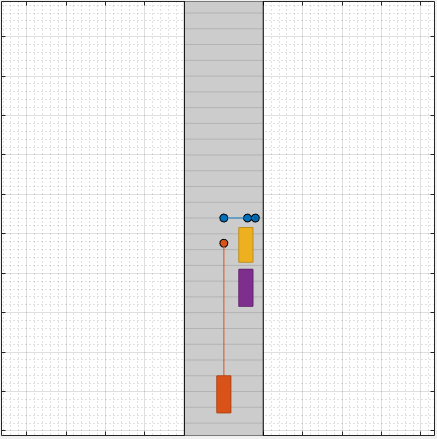
Добавьте датчик лидара к автомобилю , оборудованному датчиком. Сначала нажмите Add Lidar. Затем на Sensor Canvas щелкните предопределенное положение датчика в центре крыши автомобиля. Датчик лидара появляется черным цветом в предопределенном месте. Серый цвет, который окружает автомобиль, является зоной покрытия датчика.
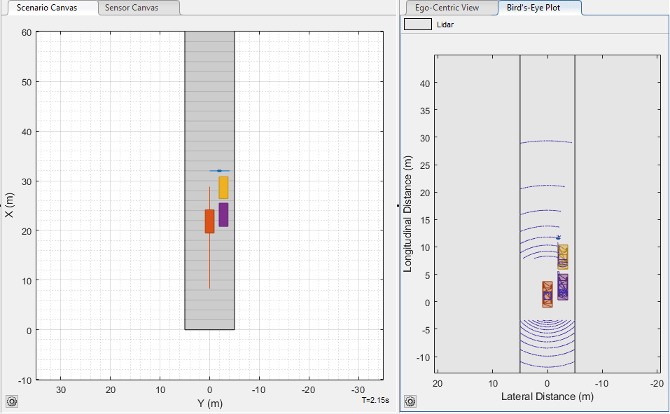
Запустите сценарий. Просмотрите различные аспекты сценария путем переключения между холстами и видами. Можно переключаться между Sensor Canvas и Scenario Canvas и между Bird's-Eye Plot и Ego-Centric View.
В Bird's-Eye Plot и Ego-Centric View актёры отображаются как сетки, а не как кубоиды. Чтобы изменить настройки отображения, используйте опции Display на панели инструментов приложения.
Экспорт данных о датчике в рабочее пространство MATLAB. Щелкните Export > Export Sensor Data, введите имя переменной рабочей области и нажатия кнопки OK.
Программно создайте сценарий вождения, радар-датчик и датчик камеры. Затем импортируйте сценарий и датчики в приложение. Для получения дополнительной информации о работе с программными сценариями вождения и датчиками, смотрите, Создают Изменения Сценария Вождения Программно.
Создайте простой сценарий вождения при помощи drivingScenario объект. При таком сценарии автомобиля , оборудованного датчиком едет прямо на 50-метровом дорожном сегменте с постоянной скоростью 30 метров в секунду. Для автомобиля , оборудованного датчиком задайте ClassID свойство 1. Это значение соответствует Class ID приложения 1, который относится к актерам класса Car. Для получения дополнительной информации о том, как приложение определяет классы, смотрите описание параметра Class на вкладке параметров Actors.
scenario = drivingScenario; roadCenters = [0 0 0; 50 0 0]; road(scenario,roadCenters); egoVehicle = vehicle(scenario,'ClassID',1,'Position',[5 0 0]); waypoints = [5 0 0; 45 0 0]; speed = 30; smoothTrajectory(egoVehicle,waypoints,speed)
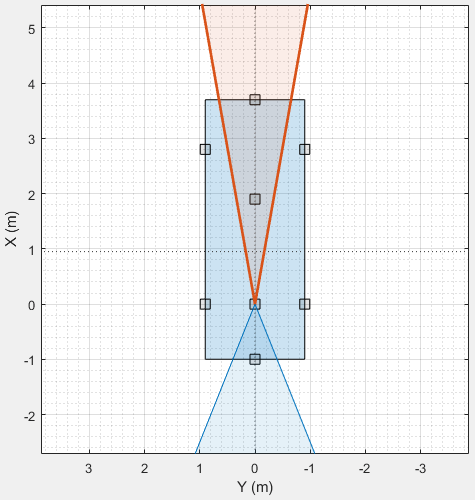
Создайте радарный датчик при помощи drivingRadarDataGenerator объект и создайте датчик камеры при помощи visionDetectionGenerator объект. Поместите оба датчика в транспортное средство источника с радаром, обращенным вперед, и камерой, обращенной назад.
radar = drivingRadarDataGenerator('MountingLocation',[0 0 0]); camera = visionDetectionGenerator('SensorLocation',[0 0],'Yaw',-180);
Импортируйте сценарий, фронтальный радарный датчик и задний датчик камеры в приложение.
drivingScenarioDesigner(scenario,{radar,camera})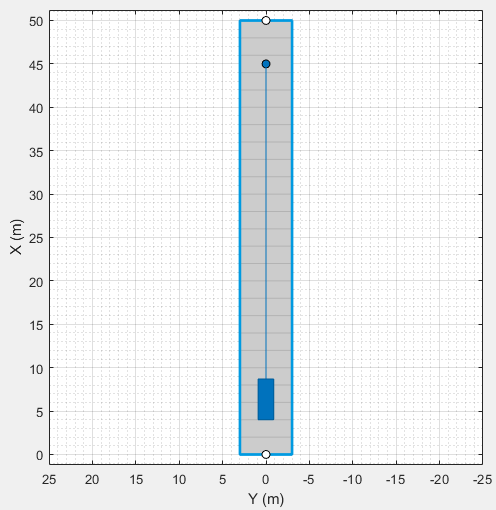
Затем можно запустить сценарий и изменить сценарий и датчики. Чтобы сгенерировать новые drivingScenario, drivingRadarDataGenerator, и visionDetectionGenerator объекты на панели инструментов приложения выберите Export > Export MATLAB Function, а затем запустите сгенерированную функцию.
Загрузите сценарий вождения, содержащий датчик, и сгенерируйте модель Simulink из сценария и датчика. Для более подробного примера генерации моделей Simulink из приложения смотрите Сгенерируйте блоки датчика используя Driving Scenario Designer.
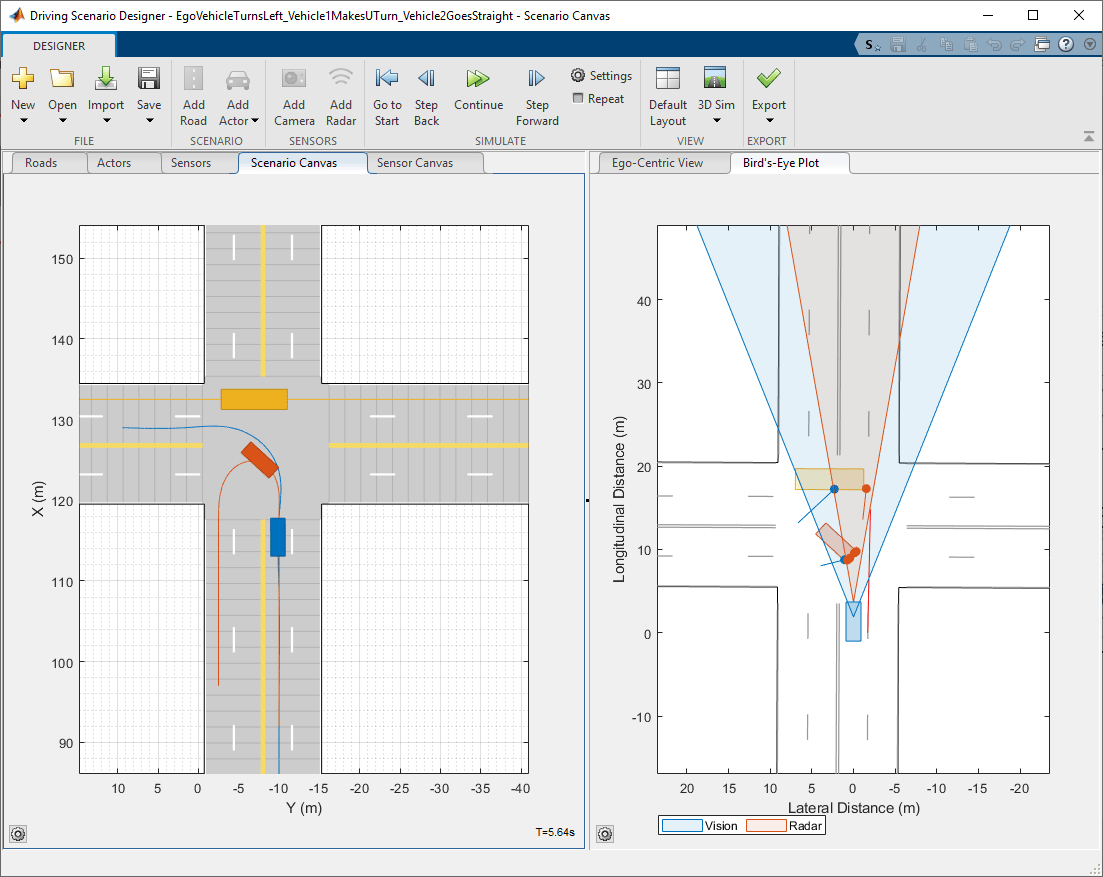
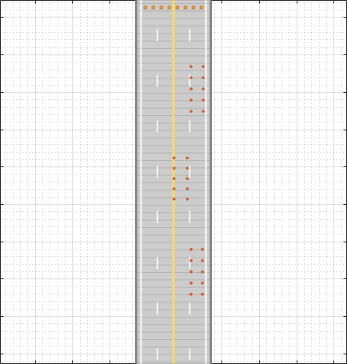
Загрузите предварительно построенный сценарий вождения в приложение. Сценарий содержит два транспортных средств, пересекающих перекресток. Автомобиль , оборудованный датчиком перемещается на север и содержит датчик камеры. Этот датчик сконфигурирован, чтобы обнаружить и объекты, и полосы движения.
path = fullfile(matlabroot,'toolbox','shared','drivingscenario','PrebuiltScenarios'); addpath(genpath(path)) % Add folder to path drivingScenarioDesigner('EgoVehicleGoesStraight_VehicleFromLeftGoesStraight.mat') rmpath(path) % Remove folder from path

Сгенерируйте модель Simulink сценария и датчика. На панели инструментов приложения выберите Export > Export Simulink Model. При появлении запроса сохраните файл сценария.

Блок Scenario Reader считывает дорогу и актёров из файла сценария. Чтобы обновить данные сценария в модели, обновите сценарий в приложении и сохраните файл.
Блок Vision Detection Generator воссоздает датчик камеры, заданный в приложении. Чтобы обновить датчик в модели, обновите датчик в приложении, выберите Export > Export Sensor Simulink Model и скопируйте только что сгенерированный блок датчика в модель. Если при обновлении датчиков вы обновляли какие-либо дороги или актёры, выберите Export > Export Simulink Model. В этом случае Scenario Reader блок точно читает данные профиля актёра и передает их датчику.
Создайте сценарий с траекториями транспортного средства, которые можно позже воссоздать в Simulink для симуляции в 3D окружении.
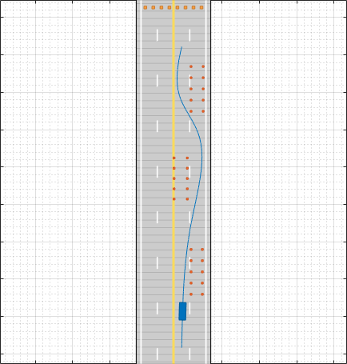
Откройте один из предварительно созданных сценариев, который воссоздает сцену по умолчанию, доступную в 3D окружении. На панели инструментов приложения выберите Open > Prebuilt Scenario > Simulation3D и выберите сценарий. Для примера выберите DoubleLaneChange.mat сценарий.
Укажите транспортное средство и его траекторию.
Обновите размерности автомобиля, чтобы соответствовать размерностям предопределенных типов транспортных средств в 3D среде симуляции.
На вкладке Actors выберите опцию 3D Display Type.
На панели инструментов приложения выберите 3D Display > Use 3D Simulation Actor Dimensions. В Scenario Canvas размеры актёра обновляются, чтобы соответствовать предопределенным размерностям актёров в 3D среде симуляции.
Предварительный просмотр того, как будет выглядеть сценарий, когда вы позже воссоздаете его в Simulink. На панели инструментов приложения выберите 3D Display > View Simulation in 3D Display. После открытия 3D окна нажмите Run.
Измените транспортное средство и траекторию по мере необходимости. Избегайте изменения дорожной сети или субъектов, которые были предопределены в сценарии. В противном случае сценарий приложения не будет совпадать со сценарием, который вы позже воссоздаете в Simulink. При изменении сценария окно отображения 3D закроется.
Когда вы завершили изменение сценария, можно воссоздать его в модели Simulink для использования в 3D среде симуляции. Для примера, который показывает, как настроить такую модель, смотрите Визуализируйте Данные Датчика из Unreal Engine Simulation Environment.
Roads - ширина дороги, угол берега, спецификации маршрута и расположение центра дороги;Чтобы включить параметры Roads, добавьте по крайней мере одну дорогу к сценарию. Затем выберите дорогу из параметра Scenario Canvas или Road. Значения параметров на вкладке Roads основаны на выбранной дороге.
| Параметр | Описание |
|---|---|
| Road | Дорога для изменения, заданная как список дорог в сценарии. |
| Name | Имя дороги. Имя импортированной дороги зависит от картографической службы. Например, когда вы генерируете дорогу с помощью данных OpenStreetMap, приложение использует имя дороги, когда она доступна. В противном случае приложение использует идентификатор дороги, заданный данными OpenStreetMap. |
| Width (m) | Ширина дороги, в метрах, задается в виде десятичного скаляра в области значений (0, 50]. Если кривизна дороги слишком резкая, чтобы разместить заданную ширину дороги, приложение не генерирует дорогу. По умолчанию: |
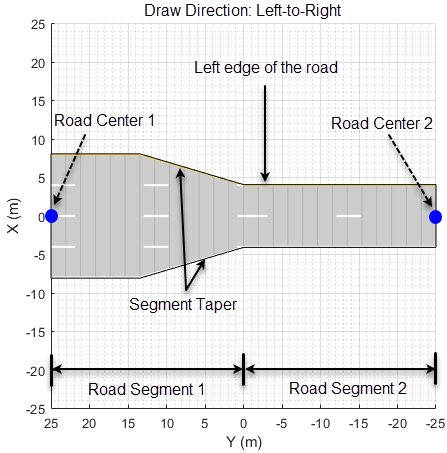
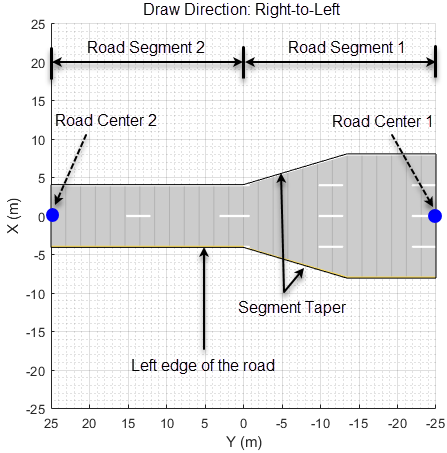
| Number of Road Segments | Количество сегментов дороги, заданное в виде положительного целого числа. Используйте этот параметр, чтобы включить составную спецификацию маршрута путем деления дороги на сегменты дороги. Каждый сегмент дороги представляет часть дороги с различными спецификациями маршрута. Спецификации маршрута отличаются от одного сегмента дороги к другому. Для получения дополнительной информации о спецификациях составных маршрутов см. «Спецификация составных маршрутов». По умолчанию: |
| Segment Range | Нормированные области значений для каждого сегмента дороги, заданные как вектор-строка значений в область значений (0, 1). Длина вектора должна быть равна Number of Road Segments значению параметров. Сумма вектора должна быть равна По умолчанию область значений каждого сегмента дороги является обратным количеству сегментов дороги. Зависимости Чтобы включить этот параметр, задайте Number of Road Segments значение параметров больше |
| Road Segment | Выберите сегмент дороги из списка, чтобы задать его Lanes параметры. Зависимости Чтобы включить этот параметр, задайте Number of Road Segments значение параметров больше |
Lanes - Спецификации маршрута, такие как типы маршрута и разметка маршрутаИспользуйте эти параметры для задания информации о маршруте, такой как типы маршрута и разметка маршрута. Когда значение параметра Number of Road Segments больше 1эти параметры применяются к выбранному сегменту дороги.
| Параметр | Описание | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Number of Lanes | Количество полос в дороге, заданное в качестве одного из следующих значений:
Если вы увеличиваете количество полос, добавленные полосы имеют ширину, заданную в параметре Lane Width (m). Если Lane Width (m) является вектором различной ширины маршрута, то добавленные маршруты имеют ширину, заданную в последнем векторном элементе. | ||||||||||||
| Lane Width (m) | Ширина каждой дорожной полосы, в метрах, указывается как одно из следующих значений:
Ширина каждой полосы должна быть больше, чем ширина содержащейся в ней разметки полосы. Эти разметки маршрута заданы параметром Marking > Width (m). | ||||||||||||
| Lane Types | Полосы в дороге, заданные как список типов полос в выбранной дороге. Чтобы изменить один или несколько параметров маршрута, включая тип маршрута, цвет и прочность, выберите нужную полосу из раскрывающегося списка. | ||||||||||||
| Lane Types > Type | Тип маршрута, заданный в качестве одного из следующих значений:
По умолчанию: | ||||||||||||
| Lane Types > Color | Цвет маршрута, заданный как триплет RGB со значениями по умолчанию:
Кроме того, можно также задать некоторые простые цвета как триплет RGB, шестнадцатеричный код цвета, название цвета или короткое название цвета. Для получения дополнительной информации см. «Цветовые спецификации для дорожек и разметки». | ||||||||||||
| Lane Types > Strength | Сила насыщения цвета маршрута, заданная как десятичный скаляр в области значений [0, 1].
По умолчанию: | ||||||||||||
| Lane Markings | Разметка маршрута, заданная как список разметки маршрута на выбранной дороге. Чтобы изменить один или несколько параметров разметки маршрута, включая тип, цвет и прочность маркировки маршрута, выберите требуемую разметку маршрута из раскрывающегося списка. Дорога с N полосами имеет (N + 1) разметку маршрута. | ||||||||||||
| Lane Markings > Specify multiple marker types along a lane | Выберите этот параметр, чтобы задать составную разметку маршрута. Составная разметка маршрута содержит несколько типов маркеров вдоль маршрута. Фрагмент разметки маршрута, которая содержит каждый тип маркера, упоминается как marker segment. Для получения дополнительной информации о составной разметке маршрута см. Раздел «Составная разметка маршрута». | ||||||||||||
| Lane Markings > Number of Marker Segments | Количество сегментов маркера в составной разметке маршрута, заданное как целое число, больше или равное 2. Составная разметка маршрута должна иметь как минимум два сегмента маркера. По умолчанию: Зависимости Чтобы включить этот параметр, выберите параметр Specify multiple marker types along a lane. | ||||||||||||
| Lane Markings > Segment Range | Нормированная область значений для каждого сегмента маркера в составной разметке маршрута, заданный как вектор-строка значений в области значений [0, 1]. Длина вектора должна быть равна Number of Marker Segments значению параметров. По умолчанию: Зависимости Чтобы включить этот параметр, выберите параметр Specify multiple marker types along a lane. | ||||||||||||
| Lane Markings > Marker Segment | Маркер сегментов, заданный как список типов маркеров в выбранной разметке маршрута. Чтобы изменить один или несколько параметров сегмента маркера, включая тип, цвет и силу маркировки, выберите нужный сегмент маркера из раскрывающегося списка. Зависимости Чтобы включить этот параметр, выберите параметр Specify multiple marker types along a lane. | ||||||||||||
| Lane Markings > Type | Тип разметки маршрута, заданный как одно из следующих значений:
По умолчанию для дороги с односторонним движением самая левая разметка маршрута - сплошная желтая линия, самая правая разметка маршрута - сплошная белая линия, а разметка для внутренних полос - штриховые белые линии. Для двухсторонних дорог самой наружной разметкой по умолчанию являются сплошные белые линии, а разделительной разметкой - две сплошные желтые линии. Если вы активируете параметр Specify multiple marker types along a lane, это значение применяется к выбранному сегменту маркера в составной разметке маршрута. | ||||||||||||
| Lane Markings > Color | Цвет разметки маршрута, заданный как триплет RGB, шестнадцатеричный код цвета, название цвета или короткое название цвета. Для маркера маршрута, задающего двойную линию, используется один и тот же цвет для обеих линий. Можно также задать некоторые простые цвета как триплет RGB, шестнадцатеричный код цвета, название цвета или короткое название цвета. Для получения дополнительной информации см. «Цветовые спецификации для дорожек и разметки». Если вы активируете параметр Specify multiple marker types along a lane, это значение применяется к выбранному сегменту маркера в составной разметке маршрута. | ||||||||||||
| Lane Markings > Strength | Сила насыщения цвета разметки маршрута, заданная как десятичный скаляр в области значений [0, 1].
Для маркера маршрута, задающего двойную линию, используется одинаковая прочность для обеих линий. По умолчанию: Если вы активируете параметр Specify multiple marker types along a lane, это значение применяется к выбранному сегменту маркера в составной разметке маршрута. | ||||||||||||
| Lane Markings > Width (m) | Ширина разметки маршрута, в метрах, задается как положительный десятичный скаляр. Ширина разметки маршрута должна быть меньше ширины ограждающей полосы. Этот enclosing lane является маршрутом непосредственно слева от разметки маршрута. Для маркера маршрута, задающего двойную линию, для обеих линий используется та же ширина. По умолчанию: Если вы активируете параметр Specify multiple marker types along a lane, это значение применяется к выбранному сегменту маркера в составной разметке маршрута. | ||||||||||||
| Lane Markings > Length (m) | Длина штрихов в штриховой разметке маршрута, в метрах, задается как десятичный скаляр в области значений (0, 50]. Для маркера маршрута, задающего двойную линию, одинаковая длина используется для обеих линий. По умолчанию: Если вы активируете параметр Specify multiple marker types along a lane, это значение применяется к выбранному сегменту маркера в составной разметке маршрута. | ||||||||||||
| Lane Markings > Space (m) | Длина пространств между штрихами в штриховой разметке маршрута, в метрах, задается как десятичный скаляр в области значений (0, 150]. Для маркера маршрута, задающего двойную линию, то же пространство используется для обеих линий. По умолчанию: Если вы активируете параметр Specify multiple marker types along a lane, это значение применяется к выбранному сегменту маркера в составной разметке маршрута. |
Segment Taper - Спецификации конусности между двумя сегментами дорогиЧтобы включить параметры Segment Taper, задайте значение параметров Number of Road Segments больше 1и задайте отдельное значение для параметра Number of Lanes или Lane Width (m) по меньшей мере одного сегмента дороги. Затем выберите конусность из выпадающего списка, чтобы задать параметры конусности.
Дорога с N сегментами дороги имеет (N - 1) сужения сегментов. The Lth сужение, где L < N, является частью Lth сегмент дороги.
| Параметр | Описание |
|---|---|
| Shape | Коническая форма сегмента дороги, заданная как По умолчанию: |
| Length (m) | Длина конусности сегмента дороги, заданная как положительная скалярная величина. Модули измерения указаны в метрах. Длина конуса по умолчанию меньше длины Заданная длина конуса должна быть меньше длины соответствующего сегмента дороги. В противном случае приложение сбрасывает его на значение, которое Зависимости Чтобы включить этот параметр, установите параметр Shape равным |
| Position | Ребро сегмента дороги, из которого можно добавить или сбросить полосы, заданный как одно из следующих значений:
Можно задать значение этого параметра для соединения двух сегментов дороги с односторонним движением. При соединении сегментов двухсторонней дороги друг с другом или сегментов односторонней дороги с сегментами двухсторонней дороги приложение определяет значение этого параметра на основе заданного параметра Number of Lanes. Чтобы добавить или сбросить полосы с обоих ребер сегмента дороги с односторонним движением, количество полос в сегментах дороги с односторонним движением должно отличаться четным числом. По умолчанию: Зависимости Чтобы включить этот параметр, задайте различные целочисленные скаляры для параметров Number of Lanes различных сегментов дороги. |
Road Centers - Расположение центров дорогИспользуйте эти параметры для определения ориентации дороги.
| Параметр | Описание |
|---|---|
| Bank Angle (deg) | Наклон дороги между сторонами, в степенях, задается как одно из следующих значений:
Когда вы добавляете актёра к дороге, вы не должны менять положение актёра, чтобы соответствовать углам крена, заданным этим параметром. Актёр автоматически следит за углами крена дороги. По умолчанию: |
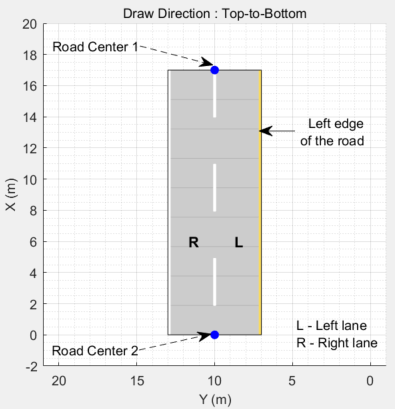
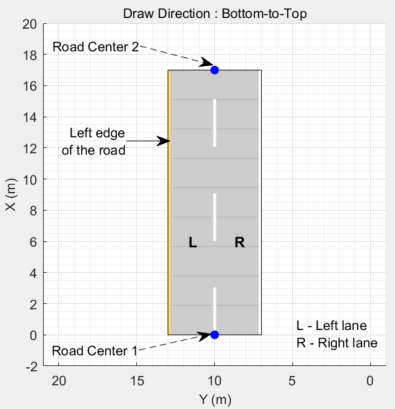
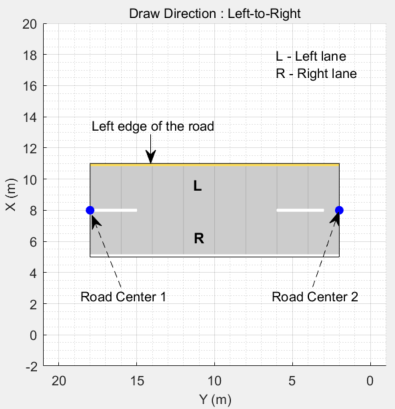
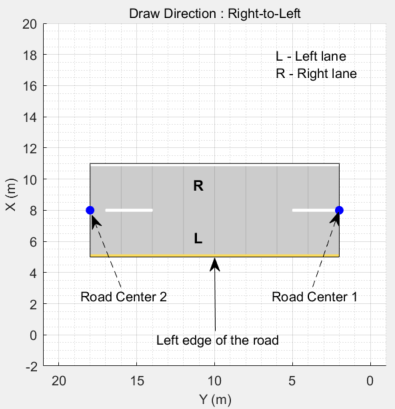
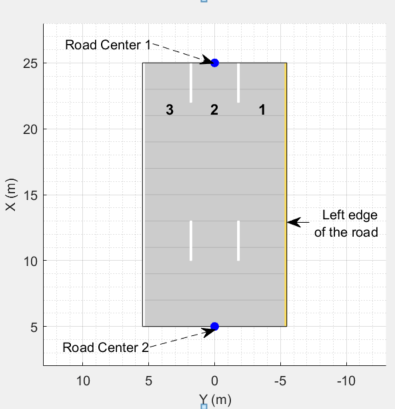
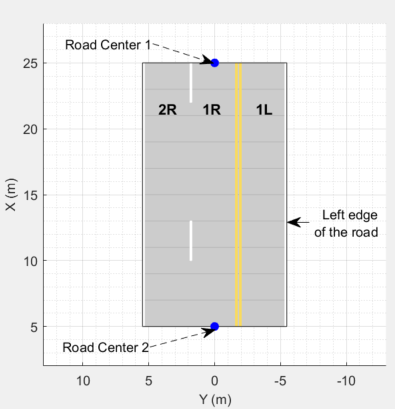
Каждая строка таблицы Road Centers содержит x -, y - и z - положения центра дороги в пределах выбранной дороги. Все дороги должны иметь как минимум два уникальных положения центра дороги. При обновлении камеры в таблице Scenario Canvas обновляется, отражая новое положение центра дороги. Ориентация дороги зависит от значений дорожных центров. Дорожные центры определяют направление, в котором дорога визуализируется в Scenario Canvas. Для получения дополнительной информации смотрите Направление рисования дороги и Нумерация полос движения.
| Параметр | Описание |
|---|---|
| x (m) | x - положение оси дороги, в метрах, заданное как десятичный скаляр. |
| y (m) | y - положение оси дороги, в метрах, заданное как десятичный скаляр. |
| z (m) | z - положение оси дороги, в метрах, заданное как десятичный скаляр.
По умолчанию: |
Road Group Centers - Расположение центра пересеченияКаждая строка таблицы Road Group Centers содержит x -, y - и z - положения центра в пределах выбранного пересечения импортированной дорожной сети. Эти параметры расположения центра являются параметрами только для чтения, так как пересечения не могут быть созданы в интерактивном режиме. Используйте roadGroup функция для программного добавления пересечения к сценарию.
| Параметр | Описание |
|---|---|
| x (m) | x - положение оси пересечения, в метрах, заданное как десятичный скаляр. |
| y (m) | y - положение оси пересечения, в метрах, заданное как десятичный скаляр. |
| z (m) | z - положение оси дороги, в метрах, заданное как десятичный скаляр.
Зависимости Чтобы включить этот параметр, выберите перекресток из Scenario Canvas. Приложение включает этот параметр только для этих случаев:
|
Actors - Положения актёра, ориентации, шаблоны RCS и траекторииЧтобы включить параметры Actors, добавьте к сценарию по крайней мере одного актёра. Затем выберите актёра из Scenario Canvas или из списка на вкладке Actors. Значения параметров на вкладке Actors основаны на выбранном актёре. Если вы выбираете несколько актёров, многие из этих параметров отключены.
| Параметр | Описание | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Color | Чтобы изменить цвет актёра, рядом со списком выбора актёра, щелкните цветовая закрашенная фигура для этого актёра.
Затем используйте палитру цветов, чтобы выбрать один из стандартных цветов, обычно используемых в графике MATLAB. Кроме того, выберите пользовательский цвет на вкладке Custom Colors , предварительно щелкнув По умолчанию приложение устанавливает для каждого вновь созданного актёра новый цвет. Этот порядок цвета основан на порядке цвета по умолчанию Чтобы задать один цвет по умолчанию для всех вновь созданных актёров определенного класса, на панели инструментов приложения выберите Add Actor > Edit Actor Classes. Затем выберите Set Default Color и щелкните соответствующая цветовая закрашенная фигура, чтобы задать цвет. Чтобы выбрать цвет по умолчанию для класса, Scenario Canvas не должен содержать актёров этого класса. Изменения цвета, сделанные в приложении, переносятся в Bird's-Eye Scope визуализации. | ||||||||||||||
| Set as Ego Vehicle | Установите выбранного актёра в качестве автомобиль , оборудованный датчиком в сценарии. Когда вы добавляете датчики к своему сценарию, приложение добавляет их к автомобилю , оборудованному датчиком. В сложение Ego-Centric View и Bird's-Eye Plot окна отображают симуляции с точки зрения автомобиля , оборудованного датчиком. Только актёры, которые имеют классы транспортного средства, такие как Для получения дополнительной информации о классах актёра смотрите описание параметра Class. | ||||||||||||||
| Name | Имя актёра. | ||||||||||||||
| Class | Класс актёра, заданный как список классов, на которые можно изменить выбранного актёра. Вы можете изменить класс актёров транспортных средств только на другие классы транспортных средств. Классы транспортных средств по умолчанию Список классов транспортных средств и нетранспортное средство появляется на панели инструментов приложения, в разделах Add Actor > Vehicles и Add Actor > Other или Add Actor > > Barriers, соответственно. Актёры, созданные в приложении, имеют наборы размерностей по умолчанию, шаблоны поперечного сечения радара и другие свойства, основанные на их Class ID значении. Таблица показывает значения Class ID по умолчанию и классы актёра.
Чтобы изменить классы актёра или создать новые классы актёра, на панели инструментов приложения выберите Add Actor > Edit Actor Classes или Add Actor > New Actor Class, соответственно. | ||||||||||||||
| 3D Display Type | Отображение типа актёра в окне отображения 3D, заданное как список типов отображения, на который можно изменить выбранного актёра. Чтобы отобразить сценарий в окне отображения 3D во время симуляции, на панели инструментов приложения нажмите 3D Display > View Simulation in 3D Display. Приложение визуализирует это отображение с помощью Unreal Engine® из эпических игр®. Для любого актёра доступные опции 3D Display Type зависят от класса актёра, заданного в параметре Class.
Если вы меняете размерности актёра, используя параметры Actor Properties, приложение применяет эти изменения в Scenario Canvas отображения но не в 3D отображение. Этот случай не относится к актерам, чья 3D Display Type установлена на На 3D дисплее актёры всех других типов отображения имеют предопределённые размерности. Чтобы использовать одинаковые размерности на обоих отображениях, можно применить предопределенные 3D отображаемые размерности к актерам на Scenario Canvas отображении. На панели инструментов приложения, под 3D Display, выберите Use 3D Simulation Actor Dimensions. |
Actor Properties - свойства актёра, включая положение и ориентацию;Используйте эти параметры для задания таких свойств, как положение и ориентация актёра.
| Параметр | Описание |
|---|---|
| Length (m) | Длина актёра, в метрах, задается как десятичный скаляр в области значений (0, 60]. Для транспортных средств длина должна быть больше (Front Overhang + Rear Overhang). |
| Width (m) | Ширина актёра, в метрах, задается как десятичный скаляр в области значений (0, 20]. |
| Height (m) | Высота актёра, в метрах, задается как десятичный скаляр в области значений (0, 20]. |
| Front Overhang | Расстояние между передней осью и передним бампером, в метрах, задается как десятичный скаляр. Передний свес должен быть меньше (Length (m) - Rear Overhang). Этот параметр применяется только к транспортным средствам. По умолчанию: |
| Rear Overhang | Расстояние между задней осью и задним бампером, в метрах, задается как десятичный скаляр. Задний свес должен быть меньше (Length (m) - Front Overhang). Этот параметр применяется только к транспортным средствам. По умолчанию: |
| Roll (°) | Угол ориентации актёра вокруг его x оси, в степенях, задается как десятичный скаляр. Roll (°) по часовой стрелке-положительно при взгляде в прямом направлении оси x -света, который указывает вперед от актёра. При экспорте функции MATLAB сценария вождения и запуске этой функции углы крена актёров в выход сценарии оборачиваются к области значений [-180, 180]. По умолчанию: |
| Pitch (°) | Угол ориентации актёра вокруг его y оси, в степенях, задается как десятичный скаляр. Pitch (°) по часовой стрелке-положительно при взгляде в прямом направлении оси y -света, которая указывает налево от актёра. При экспорте функции MATLAB сценария вождения и запуске этой функции углы тангажа актёров в выход сценарии оборачиваются к области значений [-180, 180]. По умолчанию: |
| Yaw (°) | Угол ориентации актёра вокруг его z оси, в степенях, задается как десятичный скаляр. Yaw (°) по часовой стрелке-положительно при взгляде в прямом направлении оси z -света, которая указывает вверх от земли. Однако у Scenario Canvas есть перспектива вида на птицу, которая смотрит в обратном направлении оси z. Поэтому при просмотре актёров на этом полотне Yaw (°) против часовой стрелки-положительно. При экспорте функции MATLAB сценария вождения и запуске этой функции углы рыскания актёров в выход сценарии оборачиваются к области значений [-180, 180]. По умолчанию: |
Radar Cross Section - RCS актёраИспользуйте эти параметры, чтобы вручную задать радарное поперечное сечение (RCS) актёра. Кроме того, чтобы импортировать RCS из файла или из рабочего пространства MATLAB, разверните этот раздел параметра и нажмите Import.
| Параметр | Описание |
|---|---|
| Azimuth Angles (deg) | Горизонтальный шаблон отражения актёра, в степенях, задается как вектор монотонно увеличивающихся десятичных значений в области значений [-180, 180]. По умолчанию: |
| Elevation Angles (deg) | Вертикальный шаблон отражения актёра, в степенях, задается как вектор монотонно увеличивающихся десятичных значений в области значений [-90, 90]. По умолчанию: |
| Pattern (dBsm) | RCS-шаблон, в децибелах на квадратный метр, заданный как Q -by P десятичная таблица значений. RCS является функцией азимута и углов возвышения, где:
|
Trajectory - Траектории актёраИспользуйте таблицу Waypoints, Speeds, Wait Times, and Yaw, чтобы вручную задать или изменить положения, скорости, время ожидания и углы ориентации рыскания актёров в заданных путевых точках. При задании траекторий, чтобы переключаться между добавлением точек пути вперед и назад, используйте кнопки добавления точек пути вперед и назад.![]()
| Параметр | Описание |
|---|---|
| Constant Speed (m/s) | Скорость актёров по умолчанию при добавлении путевых точек, заданная как положительный десятичный скаляр в метрах в секунду. Если вы задаете определенные значения скорости в v (m/s) столбце таблицы Waypoints, Speeds, Wait Times, and Yaw, то приложение очищает Constant Speed (m/s) значение. Если затем вы задаете новое значение Constant Speed (m/s), то приложение устанавливает все путевые точки на новое значение постоянной скорости. Скорость актёра по умолчанию изменяется в зависимости от класса актёра. Например, легковые и грузовые автомобили имеют по умолчанию постоянную скорость 30 метров в секунду, в то время как пешеходы имеют по умолчанию постоянную скорость 1,5 метра в секунду. |
| Waypoints, Speeds, Wait Times, and Yaw | Точки пути актёра, заданные как таблица. Каждая строка соответствует путевой точке и содержит положение, скорость и ориентацию актёра в этой путевой точке. Таблица имеет следующие столбцы:
|
| Use smooth, jerk-limited trajectory | Выберите этот параметр, чтобы задать плавную траекторию для актёра. Сглаживающие траектории не имеют разрывов в ускорении и требуются для симуляции датчика INS. Если вы монтируете датчик INS к автомобилю , оборудованному датчиком, то приложение обновляет автомобиль , оборудованный датчиком, чтобы использовать плавную траекторию. Если приложение не может сгенерировать плавную траекторию, попробуйте внести следующие корректировки:
Приложение вычисляет гладкие траектории с помощью По умолчанию: |
| Рывок (м/с)3) | Максимальный продольный рывок актёра, в метрах в секунду кубированный, заданный как действительный скаляр, больший или равный 0,1. |
| Параметр | Описание |
|---|---|
| Actor spawn and despawn | Выберите этот параметр, чтобы породить или депортировать актёра в сценарии вождения, в то время как симуляция выполняется. Чтобы включить этот параметр, необходимо сначала выбрать актёра в сценарии, нажав на актёра. Задайте значения параметров Entry Time (s) и Exit Time (s), чтобы актёр входил (нерест) и выходил (despawn) из сценария, соответственно. По умолчанию: |
| Entry Time (s) | Время входа, в котором актёр порождает в сценарий во время симуляции, заданное как одно из следующих значений:
Значение по умолчанию для времени входа |
| Exit Time (s) | Время выхода, в котором актёр отрывается от сценария во время симуляции, заданное как одно из следующих значений:
Значение по умолчанию для времени выхода является |
Чтобы получить ожидаемое нерестовое и пренебрежительное поведение, Entry Time (s) и Exit Time (s) параметры должны удовлетворять этим условиям:
Каждое значение для параметра Entry Time (s) должно быть меньше, чем соответствующее значение для параметра Exit Time (s).
Каждое значение для параметров Entry Time (s) и Exit Time (s) должно быть меньше, чем все время симуляции, которое задается условием остановки или временем остановки.
Когда параметры Entry Time (s) и Exit Time (s) заданы как векторы:
Элементы каждого вектора должны быть в порядке возрастания.
Длины обоих векторов должны быть одинаковыми.
Barriers - Свойства барьерного сегмента, расположение барьерного центра и шаблонов (RCS) Чтобы включить параметры Barriers, добавьте по крайней мере один барьер к сценарию. Затем выберите барьер из Scenario Canvas или из вкладки Barriers. Значения параметров на вкладке Barriers основаны на выбранном барьере.
| Параметр | Описание |
|---|---|
| Color | Чтобы изменить цвет барьера, рядом со списком выбора актёра, щелкните цветовая закрашенная фигура для этого барьера. Затем используйте палитру цветов, чтобы выбрать один из стандартных цветов, обычно используемых в графике MATLAB. Кроме того, выберите пользовательский цвет на вкладке Custom Colors , предварительно щелкнув Изменения цвета, сделанные в приложении, переносятся в Bird's-Eye Scope визуализации. |
| Name | Имя барьера |
| Bank Angle (°) | Наклон барьера между сторонами, в степенях, задается как одно из следующих значений:
Это свойство действительно только при добавлении барьера с использованием барьерных центров. Когда вы добавляете барьер к дороге, барьер автоматически принимает углы крена дороги. По умолчанию: |
| Barrier Type | Тип барьера, заданный как один из следующих опций:
|
Barrier Properties - Барьерные свойства Используйте эти параметры для определения физических свойств барьера.
| Параметр | Описание |
|---|---|
| Width (m) | Ширина барьера, в метрах, задается как десятичный скаляр в области значений (0,20]. По умолчанию:
|
| Height (m) | Высота барьера, в метрах, задается как десятичный скаляр в области значений (0,20]. По умолчанию:
|
| Segment Length (m) | Длина каждого барьерного сегмента, в метрах, задается в виде десятичного скаляра в области значений (0,100]. По умолчанию: |
| Segment Gap (m) | Зазор между последовательными барьерными сегментами, в метрах, задается в виде десятичного числа скаляра в область значений [0, По умолчанию: |
Radar Cross Section - RCS барьераИспользуйте эти параметры, чтобы вручную задать радиолокационное поперечное сечение (RCS) барьера. Кроме того, чтобы импортировать RCS из файла или из рабочего пространства MATLAB, разверните этот раздел параметра и нажмите Import.
| Параметр | Описание |
|---|---|
| Azimuth Angles (deg) | Горизонтальный шаблон отражения барьера, в степенях, задается как вектор монотонно возрастающих десятичных значений в области значений [-180, 180]. По умолчанию: |
| Elevation Angles (deg) | Вертикальный шаблон отражения барьера, в степенях, задается как вектор монотонно увеличивающихся десятичных значений в области значений [-90, 90]. По умолчанию: |
| Pattern (dBsm) | RCS-шаблон, в децибелах на квадратный метр, заданный как Q -by P десятичная таблица значений. RCS является функцией азимута и углов возвышения, где:
|
Barrier Centers - Расположение барьерного центраКаждая строка Barrier Centers таблицы содержит x -, y - и z - положения барьерного центра в выбранном барьере. Все барьеры должны иметь по крайней мере два уникальных положения центра барьера. При обновлении камеры в таблице Scenario Canvas обновляется, отражая новое положение центра барьера. Ориентация барьера зависит от значений барьерных центров. Барьерные центры определяют направление, в котором барьер визуализируется в Scenario Canvas.
| Параметр | Описание |
|---|---|
| Road Edge Offset (m) | Расстояние, на которое барьер смещается от ребра дороги в боковом направлении, в метрах, задается как десятичный скаляр. |
| x (m) | x - положение оси барьера, в метрах, заданное как десятичный скаляр. |
| y (m) | y - положение оси барьера, в метрах, заданное как десятичный скаляр. |
| z (m) | z - положение оси барьера, в метрах, заданное как десятичный скаляр. По умолчанию: |
Sensors (Camera) - Размещение датчика камеры, параметры внутренней камеры и параметры обнаруженияЧтобы получить доступ к этим параметрам, добавьте по крайней мере один датчик камеры в сценарий путем следующих шагов:
На панели инструментов приложения нажмите Add Camera.
На вкладке Sensors выберите датчик из списка. Значения параметров на этой вкладке основаны на выбранном датчике.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы захватить данные о датчике во время симуляции и визуализировать эти данные на панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, при которой датчик обновляется, в миллисекундах, заданная как целое число, кратное шагу расчета приложения, заданному в Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, так что датчик больше не является произведением шага расчета приложения, приложение предлагает вам опцию автоматического обновления параметра Update Interval (ms) до ближайшего целого числа. По умолчанию: |
| Type | Тип датчика, заданный как Radar, Vision, Lidar или INS. |
Sensor Placement - Положение и ориентация камерыИспользуйте эти параметры, чтобы задать положение и ориентацию выбранного датчика камеры.
| Параметр | Описание |
|---|---|
| X (m) | X - положение оси в системе координат транспортного средства, в метрах, заданное как десятичный скаляр. Ось X указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y - положение оси в системе координат транспортного средства, в метрах, заданное как десятичный скаляр. Ось Y указывает налево от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах, задается как положительный десятичный скаляр. |
| Roll (°) | Угол ориентации датчика вокруг его X оси, в степенях, задается как десятичный скаляр. Roll (°) по часовой стрелке-положительно при взгляде в прямом направлении оси X -света, который указывает вперед от датчика. |
| Pitch (°) | Угол ориентации датчика вокруг его Y оси, в степенях, задается как десятичный скаляр. Pitch (°) по часовой стрелке-положительно при взгляде в прямом направлении оси Y -света, которая указывает налево от датчика. |
| Yaw (°) | Угол ориентации датчика вокруг его Z оси, в степенях, задается как десятичный скаляр. Yaw (°) по часовой стрелке-положительно при взгляде в прямом направлении оси Z -света, которая указывает вверх от земли. У Sensor Canvas есть перспектива вида птицы на глаз, которая смотрит в обратном направлении оси Z. Поэтому при просмотре зон покрытия датчика на этом полотне Yaw (°) против часовой стрелки-положительно. |
Camera Settings - Параметры собственной камерыИспользуйте эти параметры, чтобы задать собственные параметры датчика камеры.
| Параметр | Описание |
|---|---|
| Focal Length X | Горизонтальная точка, в которой камера находится в особом внимании, в пикселях, задается как положительный десятичный скаляр. Фокусное расстояние по умолчанию изменяется в зависимости от того, где вы помещаете датчик на автомобиль , оборудованный датчиком. |
| Focal Length Y | Вертикальная точка, в которой камера находится в особом внимании, в пикселях, задается как положительный десятичный скаляр. Фокусное расстояние по умолчанию изменяется в зависимости от того, где вы помещаете датчик на автомобиль , оборудованный датчиком. |
| Image Width | Горизонтальное разрешение камеры, в пикселях, задается как положительное целое число. По умолчанию: |
| Image Height | Вертикальное разрешение камеры, в пикселях, задается как положительное целое число. По умолчанию: |
| Principal Point X | Горизонтальный центр изображения, в пикселях, задается как положительный десятичный скаляр. По умолчанию: |
| Principal Point Y | Центр вертикального изображения, в пикселях, задается как положительный десятичный скаляр. По умолчанию: |
Sensor Parameters - Параметры обнаружения фотоаппаратаЧтобы просмотреть все параметры обнаружения камер в приложении, разверните разделы Sensor Limits, Lane Settings и Accuracy & Noise Settings.
| Параметр | Описание |
|---|---|
| Detection Type | Тип обнаружений, сообщаемых камерой, задается как одно из следующих значений:
По умолчанию: |
| Detection Probability | Вероятность того, что камера обнаружит объект, заданный как десятичный скаляр в области значений (0, 1]. По умолчанию: |
| False Positives Per Image | Количество ложных срабатываний на интервал обновления, заданное как неотрицательный десятичный скаляр. Это значение должно быть меньше или равно максимальному количеству обнаружений, заданному в параметре Limit # of Detections. По умолчанию: |
| Limit # of Detections | Выберите этот параметр, чтобы ограничить количество одновременных обнаружений объектов, о которых сообщает датчик. Задайте Limit # of Detections как положительное целое число менее 263. Чтобы включить этот параметр, установите параметр Detection Type равным По умолчанию: |
| Detection Coordinates | Система координат выходных местоположений обнаружения, заданная как одно из следующих значений:
По умолчанию: |
Пределы датчика
| Параметр | Описание |
|---|---|
| Max Speed (m/s) | Самая быстрая относительная скорость, при которой камера может обнаруживать объекты, в метрах в секунду, заданная как неотрицательная десятичная скаляра. По умолчанию: |
| Max Range (m) | Самое дальнее расстояние, на котором камера может обнаруживать объекты, в метрах, задается как положительный десятичный скаляр. По умолчанию: |
| Max Allowed Occlusion | Максимальный процент объекта, который может быть заблокирован при обнаружении, задается как десятичный скаляр в области значений [0, 1). По умолчанию: |
| Min Object Image Width | Минимальный горизонтальный размер объектов, которые камера может обнаружить, в пикселях, задается как положительный десятичный скаляр. По умолчанию: |
| Min Object Image Height | Минимальный вертикальный размер объектов, которые камера может обнаружить, в пикселях, задается как положительный десятичный скаляр. По умолчанию: |
Настройки маршрута
| Параметр | Описание |
|---|---|
| Lane Update Interval (ms) | Частота, при которой датчик обновляет обнаружения маршрута, в миллисекундах, задается как десятичный скаляр. По умолчанию: |
| Min Lane Image Width | Минимальный горизонтальный размер объектов, которые датчик может обнаружить, в пикселях, заданный как десятичный скаляр. Чтобы включить этот параметр, установите параметр Detection Type равным По умолчанию: |
| Min Lane Image Height | Минимальный вертикальный размер объектов, которые датчик может обнаружить, в пикселях, задается как десятичный скаляр. Чтобы включить этот параметр, установите параметр Detection Type равным По умолчанию: |
| Boundary Accuracy | Точность, с которой датчик помещает контур маршрута, в пикселях, заданной как десятичный скаляр. Чтобы включить этот параметр, установите параметр Detection Type равным По умолчанию: |
| Limit # of Lanes | Выберите этот параметр, чтобы ограничить количество обнаружений маршрута, о которых сообщает датчик. Задайте Limit # of Lanes как положительное целое число. Чтобы включить этот параметр, установите параметр Detection Type равным По умолчанию: |
Настройки точности и шума
| Параметр | Описание |
|---|---|
| Bounding Box Accuracy | Позиционный шум, используемый для подбора кривой ограничивающих рамок к целям, в пикселях, задается как положительный десятичный скаляр. По умолчанию: |
| Process Noise Intensity (m/s^2) | Интенсивность шума, используемая для сглаживания положения и измерений скорости, в метрах в секунду в квадрате, задается как положительный десятичный скаляр. По умолчанию: |
| Has Noise | Выберите этот параметр, чтобы включить добавление шума к измерениям датчика. По умолчанию: |
Sensors (Radar) - Параметры размещения и обнаружения радарного датчикаЧтобы получить доступ к этим параметрам, добавьте по крайней мере один радар-датчик к сценарию.
На панели инструментов приложения нажмите Add Radar.
На вкладке Sensors выберите датчик из списка. Значения параметров изменяются на основе выбранного датчика.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы захватить данные о датчике во время симуляции и визуализировать эти данные на панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, при которой датчик обновляется, в миллисекундах, заданная как целое число, кратное шагу расчета приложения, заданному в Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, так что датчик больше не является произведением шага расчета приложения, приложение предлагает вам опцию автоматического обновления параметра Update Interval (ms) до ближайшего целого числа. По умолчанию: |
| Type | Тип датчика, заданный как Radar, Vision, Lidar или INS. |
Sensor Placement - Положение и ориентация радараИспользуйте эти параметры, чтобы задать положение и ориентацию выбранного радарного датчика.
| Параметр | Описание |
|---|---|
| X (m) | X - положение оси в системе координат транспортного средства, в метрах, заданное как десятичный скаляр. Ось X указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y - положение оси в системе координат транспортного средства, в метрах, заданное как десятичный скаляр. Ось Y указывает налево от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах, задается как положительный десятичный скаляр. |
| Roll (°) | Угол ориентации датчика вокруг его X оси, в степенях, задается как десятичный скаляр. Roll (°) по часовой стрелке-положительно при взгляде в прямом направлении оси X -света, который указывает вперед от датчика. |
| Pitch (°) | Угол ориентации датчика вокруг его Y оси, в степенях, задается как десятичный скаляр. Pitch (°) по часовой стрелке-положительно при взгляде в прямом направлении оси Y -датчика, которая указывает налево от датчика. |
| Yaw (°) | Угол ориентации датчика вокруг его Z оси, в степенях, задается как десятичный скаляр. Yaw (°) по часовой стрелке-положительно при взгляде в прямом направлении оси Z -света, которая указывает вверх от земли. У Sensor Canvas есть перспектива вида птицы на глаз, которая смотрит в обратном направлении оси Z. Поэтому при просмотре зон покрытия датчика на этом полотне Yaw (°) против часовой стрелки-положительно. |
Sensor Parameters - Параметры радиолокационного обнаруженияЧтобы просмотреть все параметры обнаружения радаров в приложении, разверните разделы Advanced Parameters и Accuracy & Noise Settings.
| Параметр | Описание |
|---|---|
| Detection Probability | Вероятность того, что радар обнаруживает объект, заданная в виде десятичного скаляра в области значений (0, 1]. По умолчанию: |
| False Alarm Rate | Вероятность ложного обнаружения на частоту разрешения, заданная в виде десятичного скаляра в области значений [1e-07, 1e-03]. По умолчанию: |
| Field of View Azimuth | Горизонтальное поле зрения радара, в степенях, задается как положительный десятичный скаляр. По умолчанию: |
| Field of View Elevation | Вертикальное поле зрения радара, в степенях, задается как положительный десятичный скаляр. По умолчанию: |
| Max Range (m) | Самое дальнее расстояние, на котором радар может обнаруживать объекты, в метрах, заданное как положительный десятичный скаляр. По умолчанию: |
| Range Rate Min, Range Rate Max | Выберите этот параметр, чтобы задать минимальный и максимальный пределы уровня области значений для радара. Задайте Range Rate Min и Range Rate Max как десятичные скаляры, в метрах в секунду, где Range Rate Min меньше Range Rate Max. Значение по умолчанию (Min): Значение по умолчанию (Max): |
| Has Elevation | Выберите этот параметр, чтобы включить радар для измерения повышения объектов. Этот параметр включает параметры повышения в Accuracy & Noise Settings сечении. По умолчанию: |
| Has Occlusion | Выберите этот параметр, чтобы позволить радару моделировать окклюзию. По умолчанию: |
Продвинутые параметры
| Параметр | Описание |
|---|---|
| Reference Range | Ссылка области значений для заданной вероятности обнаружения, в метрах, заданная как положительное десятичное число скаляр. reference range является областью значений, в которой радар обнаруживает цель размера, заданного Reference RCS, учитывая вероятность обнаружения, заданную Detection Probability. По умолчанию: |
| Reference RCS | Ссылка RCS для заданной вероятности обнаружения, в децибелах на квадратный метр, заданная как неотрицательная десятичная скаляра. reference RCS является размером цели, при которой радар обнаруживает цель, учитывая эталонную область значений, заданный Reference Range, и вероятность обнаружения, заданная Detection Probability. По умолчанию: |
| Limit # of Detections | Выберите этот параметр, чтобы ограничить количество одновременных обнаружений, о которых сообщает датчик. Задайте Limit # of Detections как положительное целое число менее 263. По умолчанию: |
| Detection Coordinates | Система координат выходных местоположений обнаружения, заданная как одно из следующих значений:
По умолчанию: |
Настройки точности и шума
| Параметр | Описание |
|---|---|
| Azimuth Resolution | Минимальное разделение в азимутальном угле, при котором радар может различать две цели, в степенях, заданных как положительный десятичный скаляр. Разрешение азимута обычно является 3 дБ нисходящей точки в азимутальной угловой ширине луча радара. По умолчанию: |
| Azimuth Bias Fraction | Максимальная точность азимута радара, заданная в виде неотрицательного десятичного скаляра. Смещение азимута выражается как часть разрешения азимута, заданного параметром Azimuth Resolution. Модули безразмерны. По умолчанию: |
| Elevation Resolution | Минимальное разделение в угле возвышения, при котором радар может различать две цели, в степенях, заданных как положительный десятичный скаляр. Разрешение повышения обычно является нисходящей точкой на 3 дБ в угол возвышения луче радара. Чтобы включить этот параметр, в разделе Sensor Parameters выберите параметр Has Elevation. По умолчанию: |
| Elevation Bias Fraction | Максимальная точность по повышению радара, заданная как неотрицательный десятичный скаляр. Смещение повышения выражается как часть разрешения повышения, заданного параметром Elevation Resolution. Модули безразмерны. Чтобы включить этот параметр, под Sensor Parameters выберите параметр Has Elevation. По умолчанию: |
| Range Resolution | Минимальное разделение области значений, при котором радар может различать две цели, в метрах, задается как положительный десятичный скаляр. По умолчанию: |
| Range Bias Fraction | Максимальная точность области значений радара, заданная как неотрицательный десятичный скаляр. Смещение области значений выражается как часть разрешения области значений, заданного в параметре Range Resolution. Модули безразмерны. По умолчанию: |
| Range Rate Resolution | Минимальное разделение скорости области значений, при котором радар может различать две цели, в метрах в секунду, задается как положительный десятичный скаляр. Чтобы включить этот параметр, в разделе Sensor Parameters выберите параметр Range Rate Min, Range Rate Max и установите значения уровня области значений. По умолчанию: |
| Range Rate Bias Fraction | Максимальная точность скорости области значений радара, заданная в виде неотрицательного десятичного скаляра. Смещение скорости области значений выражается как часть разрешения скорости области значений, заданного в параметре Range Rate Resolution. Модули безразмерны. Чтобы включить этот параметр, в разделе Sensor Parameters выберите параметр Range Rate Min, Range Rate Max и установите значения уровня области значений. По умолчанию: |
| Has Noise | Выберите этот параметр, чтобы включить добавление шума к измерениям датчика. По умолчанию: |
| Has False Alarms | Выберите этот параметр, чтобы включить ложные предупреждения при обнаружении датчика. По умолчанию: |
Sensors (Lidar) - Размещение датчика Лидара, создание отчетов об облаке точек и параметры обнаруженияЧтобы получить доступ к этим параметрам, добавьте по крайней мере один датчик лидара к сценарию.
На панели инструментов приложения нажмите Add Lidar.
На вкладке Sensors выберите датчик из списка. Значения параметров изменяются на основе выбранного датчика.
Когда вы добавляете датчик лидара к сценарию, Bird's-Eye Plot и Ego-Centric View отображают представления сетки актёров. Например, здесь приведен пример представления ячеек актёра на Ego-Centric View.
Датчики лидара используют эти более подробные представления актёров, чтобы сгенерировать данные облака точек. В Scenario Canvas по-прежнему отображаются только кубоидные представления. Другие датчики все еще основывают свои обнаружения на кубоидных представлениях.
Чтобы выключить сетки актёра, используйте свойства, находящиеся под Display на панели инструментов приложения. Чтобы изменить типы отображения сетки актёров, выберите Add Actor > Edit Actor Classes. В редакторе классов измените параметр Mesh Display Type этого класса актёра.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы захватить данные о датчике во время симуляции и визуализировать эти данные на панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, при которой датчик обновляется, в миллисекундах, заданная как целое число, кратное шагу расчета приложения, заданному в Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, так что датчик больше не является произведением шага расчета приложения, приложение предлагает вам опцию автоматического обновления параметра Update Interval (ms) до ближайшего целого числа. По умолчанию: |
| Type | Тип датчика, заданный как Radar, Vision, Lidar или INS. |
Sensor Placement - Положение и ориентация лидараИспользуйте эти параметры, чтобы задать положение и ориентацию выбранного датчика лидара.
| Параметр | Описание |
|---|---|
| X (m) | X - положение оси в системе координат транспортного средства, в метрах, заданное как десятичный скаляр. Ось X указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y - положение оси в системе координат транспортного средства, в метрах, заданное как десятичный скаляр. Ось Y указывает налево от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах, задается как положительный десятичный скаляр. |
| Roll (°) | Угол ориентации датчика вокруг его X оси, в степенях, задается как десятичный скаляр. Roll (°) по часовой стрелке-положительно при взгляде в прямом направлении оси X -света, который указывает вперед от датчика. |
| Pitch (°) | Угол ориентации датчика вокруг его Y оси, в степенях, задается как десятичный скаляр. Pitch (°) по часовой стрелке-положительно при взгляде в прямом направлении оси Y -датчика, которая указывает налево от датчика. |
| Yaw (°) | Угол ориентации датчика вокруг его Z оси, в степенях, задается как десятичный скаляр. Yaw (°) по часовой стрелке-положительно при взгляде в прямом направлении оси Z -света, которая указывает вверх от земли. У Sensor Canvas есть перспектива вида птицы на глаз, которая смотрит в обратном направлении оси Z. Поэтому при просмотре зон покрытия датчика на этом полотне Yaw (°) против часовой стрелки-положительно. |
Point Cloud Reporting - Параметры отчетности облака точек| Параметр | Описание |
|---|---|
| Detection Coordinates | Система координат выходных местоположений обнаружения, заданная как одно из следующих значений:
По умолчанию: |
| Output organized point cloud locations | Выберите этот параметр, чтобы вывести сгенерированные данные датчика как организованное облако точек. Если удалить этот параметр, выход будет неорганизованным. По умолчанию: |
| Include ego vehicle in generated point cloud | Выберите этот параметр, чтобы включить автомобиль , оборудованный датчиком в сгенерированное облако точек. По умолчанию: |
| Include roads in generated point cloud | Выберите этот параметр, чтобы включить дороги в сгенерированное облако точек. По умолчанию: |
Sensor Parameters - Параметры обнаружения лидараПределы датчика
| Параметр | Описание |
|---|---|
| Max Range (m) | Самое дальнее расстояние, на котором лидар может обнаружить объекты, в метрах, заданное как положительный десятичный скаляр. По умолчанию: |
| Range Accuracy (m) | Точность измерений области значений, в метрах, задается как положительный десятичный скаляр. По умолчанию: |
| Azimuth | Азимутальное разрешение датчика лидара, в степенях, задается как положительный десятичный скаляр. Азимутальное разрешение задает минимальное разделение по азимутальному углу, при котором лидар может различать две цели. По умолчанию: |
| Elevation | Разрешение по повышению датчика лидара, в степенях, задается как положительный десятичный скаляр. Разрешение повышения определяет минимальное разделение в угол возвышения, при котором лидар может различать две цели. По умолчанию: |
| Azimuthal Limits (deg) | Азимутальные пределы датчика лидара, в степенях, заданы как двухэлементный вектор десятичных скаляров вида По умолчанию: |
| Elevation Limits (deg) | Пределы повышения лидарного датчика, в степенях, заданы как двухэлементный вектор десятичных скаляров вида По умолчанию: |
| Has Noise | Выберите этот параметр, чтобы включить добавление шума к измерениям датчика. По умолчанию: |
Sensors (INS) - размещение датчика ИНС, параметры измеренияЧтобы получить доступ к этим параметрам, добавьте по крайней мере один датчик INS к сценарию путем следующих шагов:
На панели инструментов приложения нажмите Add INS.
На вкладке Sensors выберите датчик из списка. Значения параметров на этой вкладке основаны на выбранном датчике.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы захватить данные о датчике во время симуляции и визуализировать эти данные на панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, при которой датчик обновляется, в миллисекундах, заданная как целое число, кратное шагу расчета приложения, заданному в Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, так что датчик больше не является произведением шага расчета приложения, приложение предлагает вам опцию автоматического обновления параметра Update Interval (ms) до ближайшего целого числа. По умолчанию: |
| Type | Тип датчика, заданный как Radar, Vision, Lidar или INS. |
Sensor Placement - положение ИНСИспользуйте эти параметры, чтобы задать положение выбранного датчика INS. Ориентация датчика принята совмещенной с началом ego-автомобиля, поэтому свойства Roll (°), Pitch (°) и Yaw (°) для этого датчика отключены.
| Параметр | Описание |
|---|---|
| X (m) | X - положение оси в системе координат транспортного средства, в метрах, заданное как десятичный скаляр. Ось X указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y - положение оси в системе координат транспортного средства, в метрах, заданное как десятичный скаляр. Ось Y указывает налево от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах, задается как положительный десятичный скаляр. |
| Roll (°) | Угол ориентации датчика вокруг его X оси, в степенях, задается как десятичный скаляр. Roll (°) по часовой стрелке-положительно при взгляде в прямом направлении оси X -света, который указывает вперед от датчика. |
| Pitch (°) | Угол ориентации датчика вокруг его Y оси, в степенях, задается как десятичный скаляр. Pitch (°) по часовой стрелке-положительно при взгляде в прямом направлении оси Y -датчика, которая указывает налево от датчика. |
| Yaw (°) | Угол ориентации датчика вокруг его Z оси, в степенях, задается как десятичный скаляр. Yaw (°) по часовой стрелке-положительно при взгляде в прямом направлении оси Z -света, которая указывает вверх от земли. У Sensor Canvas есть перспектива вида птицы на глаз, которая смотрит в обратном направлении оси Z. Поэтому при просмотре зон покрытия датчика на этом полотне Yaw (°) против часовой стрелки-положительно. |
Sensor Parameters - параметры измерения INSДля получения дополнительной информации об этих параметрах смотрите insSensor страница с описанием объекта.
| Параметр | Описание |
|---|---|
| Roll Accuracy (°) | Точность крена, в степенях, задается как неотрицательный десятичный скаляр. Это значение устанавливает стандартное отклонение шума измерения крена. По умолчанию: |
| Pitch Accuracy (°) | Точность тангажа, в степенях, задается как неотрицательный десятичный скаляр. Это значение устанавливает стандартное отклонение шума измерения тангажа. По умолчанию: |
| Yaw Accuracy (°) | Точность рыскание, в степенях, задается как неотрицательный десятичный скаляр. Это значение устанавливает стандартное отклонение шума измерения рыскания. По умолчанию: |
| Position Accuracy (m) | Точность измерений x -, y - и z - положения, в метрах, задается как десятичный скаляр или трехэлементный десятичный скаляр. Это значение устанавливает стандартное отклонение шума измерения положения. Задайте скаляр, чтобы задать точность всех трех положений для этого значения. По умолчанию: |
| Velocity Accuracy (m/s) | Точность измерений скорости, в метрах в секунду, задается как десятичный скаляр. Это значение устанавливает стандартное отклонение шума измерения скорости. По умолчанию: |
| Acceleration Accuracy | Точность измерений ускорения, в метрах в секунду в квадрате, задается как десятичный скаляр. Это значение устанавливает стандартное отклонение шума измерения ускорения. По умолчанию: |
| Angular Velocity Accuracy | Точность измерений скорости вращения, в степенях в секунду, задается как десятичный скаляр. Это значение устанавливает стандартное отклонение шума измерения скорости вращения. По умолчанию: |
| Has GNSS Fix | Включите фиксирование приемника глобальной навигационной спутниковой системы (GNSS). Если вы очищаете этот параметр, то положение измерений дрейфует со скоростью, заданной параметром Position Error Factor. По умолчанию: |
| Position Error Factor | Коэффициент ошибки положения без исправления GNSS, заданный как неотрицательный десятичный скаляр или десятичный вектор 1 на 3. По умолчанию: |
| Random Stream | Источник потока случайных чисел, заданный как один из следующих опций:
По умолчанию: |
| Seed | Начальное начальное число алгоритма генератора случайных чисел mt19937ar, заданное как неотрицательное целое число. По умолчанию: |
Settings - Время расчета симуляции, условие остановки и время остановкиЧтобы получить доступ к этим параметрам, на панели инструментов приложения нажмите Settings.
| Параметр | Описание |
|---|---|
| Sample Time (ms) | Частота обновления симуляции, в миллисекундах. Увеличьте шаг расчета для ускорения симуляции. Это увеличение не влияет на скорость актёра, даже если актёры могут идти быстрее во время симуляции. Позиции актёра только отбираются и отображаются в приложении с менее частыми интервалами, что приводит к более быстрой анимации шоппье. Уменьшение шага расчета приводит к более плавной анимации, но актёры, по-видимому, двигаются медленнее, а симуляция занимает больше времени. Это шаг расчета не коррелирует с фактическим временем. Для примера, если приложение выборок каждые 0,1 секунды (Sample Time (ms) = По умолчанию: |
| Stop Condition | Остановите условие симуляции, заданное как одно из следующих значений:
По умолчанию: |
| Stop Time (s) | Время остановки симуляции, в секундах, задается как положительный десятичный скаляр. Чтобы включить этот параметр, установите параметр Stop Condition равным По умолчанию: |
| Use RNG Seed | Выберите этот параметр, чтобы использовать seed генератора случайных чисел (RNG), чтобы воспроизвести те же результаты для каждой симуляции. Задайте seed RNG как неотрицательное целое число менее 232. По умолчанию: |
Ограничения на импорт/экспорт датчиков
Когда вы импортируете drivingRadarDataGenerator датчик, который сообщает о кластеризованных обнаружениях или отслеживает в приложение, а затем экспортирует датчик в MATLAB или Simulink, экспортированный объект датчика или блок сообщает о незакрытых обнаружениях. Это изменение в формате отчетов происходит, потому что приложение поддерживает только генерацию незакрытых обнаружений.
Экспорт датчиков INS в Simulink не поддерживается. Если вы экспортируете сценарий, содержащий датчики INS в Simulink, эти датчики не включены в сгенерированную модель.
OpenStreetMap - ограничения на импорт
При импорте данных OpenStreetMap функции дороги и маршрута имеют следующие ограничения:
Информация об уровне маршрута не импортируется из дорог OpenStreetMap. Спецификации маршрута основаны только на направлении движения, указанном в дорожной сети OpenStreetMap, где:
Дороги с односторонним движением импортируются как однополосные дороги со спецификациями маршрута по умолчанию. Эти маршруты программно эквивалентны lanespec(1).
Двухсторонние дороги импортируются как двухполосные дороги с двунаправленными маршрутами и спецификациями по умолчанию. Эти маршруты программно эквивалентны lanespec([1 1]).
Таблица показывает эти различия в дорожной сети OpenStreetMap и дорожной сети в импортированном сценарии вождения.
| Дорожная сеть OpenStreetMap | Импортированный сценарий вождения |
|---|---|
|
|
При импорте дорожных сетей OpenStreetMap, которые задают данные о повышении, если данные о повышении не заданы для всех импортируемых дорог, сгенерированная дорожная сеть может содержать неточности, и некоторые дороги могут перекрываться.
Основная карта, используемая в приложении, может иметь небольшие различия от карты, используемой в сервисе OpenStreetMap. Некоторые импортированные дорожные проблемы могут также быть вызваны отсутствующими или неточными данными карты в службе OpenStreetMap. Чтобы проверить, отсутствуют ли или неточны данные из-за службы map, рассмотрите просмотр данных карты во внешнем средстве просмотра карт.
Если вы получаете предупреждение о том, что геометрия дороги не может быть вычислена, то кривизна дороги является слишком резкой, чтобы она отображалась правильно, и она не импортируется.
HERE HD Live Map - Ограничения на импорт
Импорт дорог HERE HDLM с полосами различной ширины не поддерживается. В сгенерированной дорожной сети каждая дорожная полоса имеет максимальную ширину, найденную по всей ее длине. Рассмотрим HERE HDLM полосу с шириной, которая изменяется от 2 до 4 метров по ее длине. В сгенерированной дорожной сети ширина полосы 4 метра на всём протяжении. Это изменение дорожных сетей иногда может привести к перекрытию дорог в сценарии вождения.
Если вы получаете предупреждение о том, что геометрия дороги не может быть вычислена, то кривизна дороги является слишком резкой, чтобы она отображалась правильно, и она не импортируется.
Используемая в приложении основная карта может иметь небольшие различия от карты, используемой в сервисе HERE HDLM.
Некоторые проблемы с импортированными дорогами могут быть связаны с отсутствующими или неточными данными карты в службе HERE HDLM. Например, вы можете увидеть черные линии, где дороги и соединения встречаются. Чтобы проверить, где проблема связана с данными карты, используйте HERE HD Live Map Viewer, чтобы просмотреть геометрию дорожной сети HERE HDLM. Для этого средства просмотра требуется действительная лицензия HERE. Для получения дополнительной информации смотрите сайт HERE Technologies.
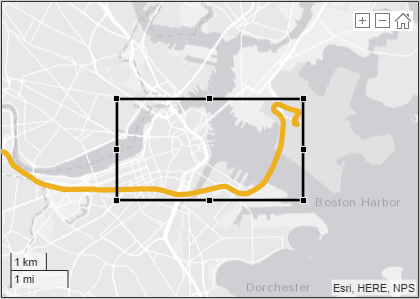
HERE HD Live Map - Ограничения выбора маршрутов
При выборе HERE HD Live Map дорог для импорта из необходимой области максимально допустимый размер области составляет 20 квадратных километров. Если вы задаете маршрут движения, который больше 20 квадратных километров, приложение рисует область, которая оптимизирована, чтобы вписаться как можно больше начала маршрута в отображение. Этот рисунок показывает пример области, нарисованной вокруг начала маршрута, которая превышает этот максимальный размер.
Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) - Ограничения на импорт
При импорте данных Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) сгенерированная дорожная сеть имеет эти ограничения. В результате этих ограничений сгенерированная сеть может содержать неточности, а дороги могут перекрываться.
Сгенерированная дорожная сеть использует данные по повышению дорог, когда Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) предоставляет его. В противном случае сгенерированная сеть использует данные о повышении местности, предоставляемые услугой.
Когда сервис Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) предоставляет информацию с использованием области значений, например, путем определения дороги с двумя-тремя полосами или дороги с шириной 3-5,5 метра, сгенерированная дорожная сеть вместо этого использует скалярные значения. Рассмотрим дорогу Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0), которая имеет две-три полосы. Сгенерированная дорожная сеть имеет две полосы.
Полосы в пределах дорог в сгенерированной сети имеют равномерную ширину. Рассмотрим дорогу шириной 4,25 метра с двумя полосами. В сгенерированной дорожной сети каждый ряд имеет ширину 2,125 метра.
Если вы получаете предупреждение о том, что геометрия дороги не может быть вычислена, то кривизна дороги является слишком резкой, чтобы она отображалась правильно, и она не импортируется.
Там, где это возможно, созданная дорожная сеть использует имена дорог, предоставляемые службой Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0). В противном случае сгенерированная дорожная сеть использует имена по умолчанию, такие как Road1 и Road2.
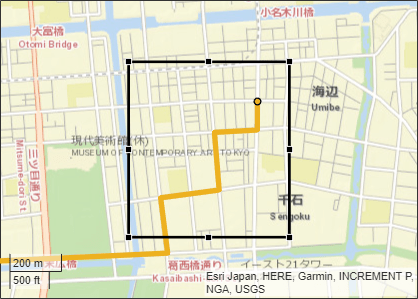
Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) - Ограничения выбора маршрутов
При выборе дорог Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) для импорта из необходимой области, максимально допустимый размер области составляет 500 квадратных метров. Если вы задаете маршрут движения, который больше 500 квадратных метров, приложение рисует область, которая оптимизирована, чтобы вписаться как можно больше начала маршрута в отображение. Этот рисунок показывает пример области, нарисованной вокруг начала маршрута, которая превышает этот максимальный размер.
Ограничения на импорт OpenDRIVE
Можно импортировать только полосы движения, информацию о типах маршрутов и дороги. Импорт дорожных объектов и дорожных сигналов не поддерживается.
Загрузка файлов OpenDRIVE, содержащих большие дорожные сети, может занять до нескольких минут. В сложение эти дорожные сети могут вызвать медленное взаимодействие на холсте приложения. Примеры крупных дорожных сетей включают таковые, которые моделируют дороги города или таковых с дорогами длиной в тысячи метров.
Полосы с переменной шириной не поддерживаются. Ширина задается как самая высокая ширина, обнаруженная в этой полосе. Например, если ширина маршрута варьируется от 2 метров до 4 метров, приложение устанавливает ширину маршрута равной 4 метрам на всем протяжении.
Дороги с информацией о типе маршрута, заданной как driving, border, restricted, shoulder, и parking поддерживаются. Полосы с любой другой информацией о типах маршрутов импортируются как пограничные полосы.
Дороги с несколькими стилями разметки маршрута, заданными как 'Unmarked', 'Solid', 'DoubleSolid', 'Dashed', 'DoubleDashed', 'SolidDashed', и 'DashedSolid' поддерживаются.
Стили разметки маршрута Bott Dots, Curbs, и Grass не поддерживаются. Полосы с этими стилями маркировки импортируются без маркировки.
Ограничения экспорта OpenDRIVE
Кубический полином и параметрические типы кубической полиномиальной геометрии в сценарии экспортируются как спиральные типы геометрии. Это приводит к некоторым изменениям в экспортированной геометрии дороги, если дорога является изогнутой дорогой.
Когда сегменты смежных дорог перекрываются друг с другом, приложение не экспортирует перекрывающиеся сегменты дорог.
Когда дорога с несколькими спецификациями маршрута имеет любой сегмент, содержащий только одну полосу, приложение не экспортирует несколько спецификаций маршрута. Вместо этого спецификации первого сегмента дороги применяются ко всей дороге при экспорте.
Когда дорога с несколькими спецификациями маршрута содержит конус между двумя сегментами дороги, приложение экспортирует дорогу без конуса.
Когда дорога, состоящая из нескольких сегментов, соединяется с соединением, приложение не экспортирует дорогу.
Соединения дорожной сети обрабатываются без информации о соединении маршрута, поэтому формы соединений могут быть неточными в экспортированном сценарии.
Приложение не экспортирует актёра, который присутствует ни на развязке, ни на дороге с несколькими сегментами дороги.
Ограничения Euro NCAP
Сценарии систем содействия скорости (SAS) не поддерживаются. Эти сценарии требуют обнаружения пределов скорости от дорожных знаков, которые приложение не поддерживает.
3D отображения ограничений
Эти ограничения описывают, как визуализация 3D Display отличается от кубоидной визуализации, которая появляется на Scenario Canvas.
Дороги не образуют развязок с немаркированными полосами на перекрестках. Дороги и их разметка маршрута перекрываются.
Поддерживаются не все цвета разметки актёра или маршрута. Отображение 3D соответствует выбранному цвету ближайшему доступному цвету, который можно отобразить.
Не поддерживаются цвета нетранспортных полос. При выборе типа невозвращающегося маршрута на 3D отображении полоса отображается как ведущая полоса.
На вкладке Actors указанные Roll (°) и Pitch (°) значения параметров актёра игнорируются. В Waypoints таблице z (m) значения (то есть значения повышений) также игнорируются. Во время симуляции актёры следуют за углом повышения и наклона поверхности дороги.
Несколько стилей маркировки вдоль маршрута не поддерживаются. На 3D отображении применяется первый стиль разметки маршрута первого сегмента маршрута по всей длине маршрута.
Актёры с 3D Display Type Cuboid не перемещаться в 3D отображении. Во время симуляции эти актёры остаются стационарными в своих начальных заданных положениях.
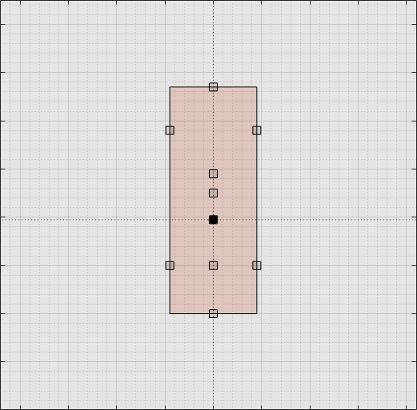
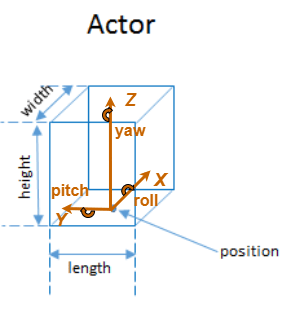
В сценариях вождения actor является кубоидным (коробчатым) объектом с определенной длиной, шириной и высотой. Актёры также имеют радиолокационный шаблон поперечного сечения (RCS), заданный в dBsm, который можно уточнить, задав угловые координаты азимута и повышения. Положение актёра определяется как центр его нижней грани. Эта центральная точка используется как вращательный центр актёра, его точка контакта с землей и ее источник в локальной системе координат. В этой системе координат:
Ось X указывает вперед от актёра.
Ось Y указывает на левую сторону актёра.
Ось Z указывает вверх от земли.
Крен, тангаж и рыскание положительны по часовой стрелке при взгляде в прямом направлении X -, Y - и Z - осей, соответственно.
А vehicle - актёр, который перемещается на колесах. Транспортные средства обладают тремя дополнительными свойствами, которые регулируют размещение их передней и задней осей.
Wheelbase - Расстояние между передней и задней осями
Front overhang - Расстояние между передней частью транспортного средства и передней осью
Rear overhang - Расстояние между задней осью и задней частью транспортного средства
В отличие от других типов актёров, положение транспортного средства определяется точкой на земле, которая находится ниже центра его задней оси. Эта точка соответствует естественному центру вращения транспортного средства. Как и в случае с нетранспортными средствами, эта точка является источником в локальной системе координат транспортного средства, где:
Ось X указывает вперед от транспортного средства.
Ось Y указывает на левую сторону транспортного средства.
Ось Z указывает вверх от земли.
Крен, тангаж и рыскание положительны по часовой стрелке при взгляде в прямом направлении X -, Y - и Z - осей, соответственно.
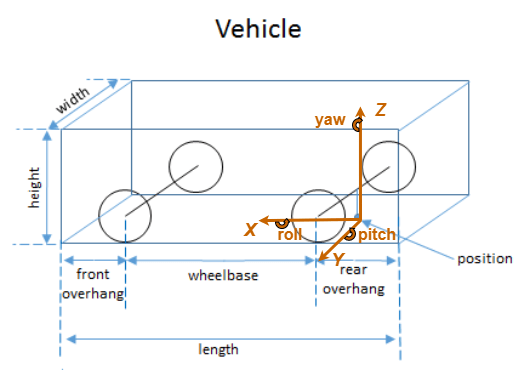
Источник (то есть положение) кубоидных транспортных средств отличается от источника транспортных средств в 3D среде симуляции. В 3D среде симуляции источники транспортного средства находятся на земле, в геометрическом центре транспортного средства.
| Кубоидный источник транспортного средства | 3D симуляции источника транспортного средства |
|---|---|
|
|
Для нетранспортных средств, источники идентичны и расположены в нижней части геометрического центра актёров.
В Simulink, чтобы преобразовать транспортное средство из кубоидного источника в 3D источник симуляции, используйте блок Cuboid To 3D Simulation. Для получения дополнительной информации о 3D координатах симуляции смотрите Системы координат для Unreal Engine Simulation в Automated Driving Toolbox.
В этой таблице перечислены именованные опции цвета, эквивалентные триплеты RGB и шестнадцатеричные коды цвета, которые можно использовать для определения цвета полос движения и разметки на дороге.
| Название цвета | Краткое имя | Триплет RGB | Шестнадцатеричный цветовой код | Внешность |
|---|---|---|---|---|
red | r | [1 0 0] | #FF0000 |
|
green | g | [0 1 0] | #00FF00 |
|
blue | b | [0 0 1] | #0000FF |
|
cyan
| c | [0 1 1] | #00FFFF |
|
magenta | m | [1 0 1] | #FF00FF |
|
yellow | y | [0.98 0.86 0.36] | #FADB5C |
|
black | k | [0 0 0] | #000000 |
|
white | w | [1 1 1] | #FFFFFF |
|
Чтобы создать дорогу при помощи road function, задайте дорожные центры как матричный вход. Функция создает ориентированную линию, которая пересекает центры дорог, начиная с координат в первой строке матрицы и заканчивая координатами в последней строке матрицы. Координаты в первых двух строках матрицы определяют draw direction дороги. Эти координаты соответствуют первым двум последовательным центрам дорог. Направление рисования является направлением, в котором дороги визуализируются на графике сценария.
Чтобы создать дорогу при помощи приложения Driving Scenario Designer, можно либо задать параметр Road Centers, либо в интерактивном режиме нарисовать на Scenario Canvas. Подробный пример см. в разделе Создание сценария вождения. В этом случае направление рисования является направлением, в котором дороги визуализируются в Scenario Canvas.
Для дороги с направлением ничьей от начала до конца разница между x - координаты первых двух последовательных дорожных центров положительная.
Поскольку дорога с основанием к верхней части привлекает направление, различие между x - координаты первых двух последовательных дорожных центров отрицательны.
|
|
|
Для дороги с направлением рисования слева направо различие между y -кординатами первых двух последовательных центров дороги положительная.
Для дороги с направлением рисования справа налево различие между y -кординатами первых двух последовательных центров дороги отрицательная.
|
|
|
Полосы должны нумероваться слева направо, при этом левый край дороги должен быть определен относительно направления рисования дороги. Для дороги с односторонним движением по умолчанию левый край дороги представляет собой сплошную желтую разметку, которая указывает конец дороги в поперечном направлении (направлении, перпендикулярном направлению рисования). Для двухсторонней дороги по умолчанию оба ребер отмечены сплошными белыми линиями.
Для примера эти схемы показа, как нумеруются полосы в односторонней и двухсторонней дороге с направлением вытяжки сверху вниз.
| Нумерация полос в односторонней дороге | Нумерация полос на двухсторонней дороге |
Задайте количество полос в качестве положительного целого числа для односторонней дороги. Если вы задаете целое значение следующим 1, 2, 3 обозначают первую, вторую и третью полосы дороги, соответственно.
| Задайте количество полос в качестве двухэлементного вектора положительного целого числа для двухсторонней дороги. Если вы устанавливаете вектор равным [ 1L обозначают единственную левую полосу дороги. 1R и 2R обозначают первую и вторую правые полосы дороги, соответственно.
|
Спецификации маршрута применяются в порядке нумерации маршрутов.
Составная разметка маршрута содержит два или более сегментов маркера, которые определяют несколько типов разметки вдоль маршрута. Геометрические свойства составной разметки маршрута включают геометрические свойства каждого типа разметки и нормализованные длины сегментов маркера.
Порядок, в котором указанные сегменты маркера происходят в составной разметке маршрута, зависит от направления вытяжки дороги. Каждый сегмент маркера является направленным сегментом с начальной точкой и движется к последнему центру дороги. Первый сегмент маркера начинается от центра первой дороги и движется к последнему центру дороги на заданную длину. Второй сегмент маркера начинается с конечной точки первого сегмента маркера и движется к последнему центру дороги на заданную длину. Этот же процесс применяется к каждому сегменту маркера, заданному для составной разметки маршрута. Нормированную длину можно задать для каждого из этих сегментов маркера, задав range входной параметр.
Например, рассмотрим дорогу в один конец с двумя полосами. Вторая разметка маршрута от левого края дороги представляет собой составную разметку маршрута с типами разметки Solid и Dashed. Нормированная область значений для каждого типа маркировки составляет 0,5. Первый сегмент маркера является сплошной разметкой, а второй сегмент маркера - штриховой разметкой. Эти схемы показывают порядок применения сегментов маркера к направлениям рисования дороги слева направо и справа налево.
|
|
|
Для получения информации о геометрических свойствах разметки маршрута смотрите Спецификации маршрута.
Составная спецификация маршрута состоит из массива из двух или более спецификаций маршрута для одной дороги. Каждая спецификация маршрута задает сегмент дороги, который является участком дороги с независимыми геометрическими свойствами, нормализованным областью значений и конусностью.
Каждый сегмент дороги является направленным сегментом, который движется к конечному центру дороги, причем первый сегмент начинается в первом центре дороги, второй сегмент начинается с первого конца дороги и так далее. Область значений каждого сегмента дороги является нормированным расстоянием, которое задает долю от общей длины дороги. Когда сегмент дороги добавляет или сбрасывает полосы из предыдущего сегмента, предыдущий сегмент сужается вдоль заданного расстояния, чтобы учесть изменение количества полос.
При тонировании дороги с составными спецификациями маршрута сегменты дороги отображаются в направлении рисования дороги. Например, рассмотрите дорогу с односторонним движением с двумя сегментами дороги и нормализованной областью значений по умолчанию 0,5 для каждого сегмента дороги. Первый сегмент дороги содержит четыре полосы, а второй сегмент - только две полосы. Первый сегмент сужается с четырёх полос на две полосы, сбрасывая по одной полосе с каждой стороны, так как приближается к полуторной точке дороги, которая является начальной точкой второго сегмента. Эти схемы показывают направление, в котором отображаются сегменты дороги, и то, как конус применяется к дороге, как для направления рисования слева направо, так и справа налево.
|
|
|
Для получения информации о геометрических свойствах маршрутов смотрите Спецификации маршрутов.
При импорте данных карты заданные вами области карты и количество выбранных дорог оказывают непосредственный эффект на эффективность приложения. Чтобы улучшить эффективность, укажите наименьшие области карты и выберите наименьшее количество дорог, которые вам нужно создать свой сценарий вождения.
Можно отменить (нажать Ctrl+Z) и повторно (нажать Ctrl+Y) изменения, которые вы делаете в сценарии и холстах датчика. Например, можно использовать эти ярлыки для удаления недавно расположенного центра дороги или повторного перемещения радарного датчика. Для получения дополнительных ярлыков смотрите Горячие клавиши и действия мыши для дизайнера сценариев вождения
В сценариях, которые содержат много актёров, чтобы отслеживать автомобиль , оборудованный датчиком, можно добавить индикатор вокруг транспортного средства. На панели инструментов приложения выберите Display > Show ego indicator. Круг вокруг автомобиля , оборудованного датчиком подсвечивает расположение транспортного средства в сценарии. Этот круг не является зоной покрытия датчика.
[1] Европейская программа оценки новых автомобилей. Протокол оценки Euro NCAP - SA. Версия 8.0.2. Январь 2018 года.
[2] Европейская программа оценки новых автомобилей. Протокол Euro NCAP AEB C2C Test Protocol. Версия 2.0.1. Январь 2018 года.
[3] Европейская программа оценки новых автомобилей. Протокол тестирования Euro NCAP LSS. Версия 2.0.1. Январь 2018 года.
[4] Dupuis, Marius, et al. Спецификация формата OpenDRIVE. Редакция 1.4, Выпуск H, № документа VI2014.106. Bad Aibling, Германия: VIRES Simulationstechnologie GmbH, 4 ноября 2015 года.
drivingRadarDataGenerator | drivingScenario | insSensor | lidarPointCloudGenerator | visionDetectionGenerator[1] Вам необходимо заключить отдельное соглашение с HERE в порядок получения доступа к сервисам HDLM и получения необходимых учетных данных (access_key_id и access_key_secret) для использования сервиса HERE.
[2] Чтобы получить доступ к сервису Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) и получить необходимые учетные данные (идентификатор клиента и секретный ключ), необходимо заключить отдельное соглашение с ZENRIN DataCom CO., LTD.