Задержка входа изменяющимся во времени дробным количеством периодов дискретизации
Примечание
The DirectFeedthrough свойство удалено. Удалите все образцы этого свойства в MATLAB® код. Для получения дополнительной информации см. Вопросы совместимости.
The dsp.VariableFractionalDelay Система object™ задерживает входной сигнал на заданное количество дробных выборок вдоль каждого канала входа. Объект может также одновременно вычислять несколько задержанные версии (отводов) одного и того же сигнала. Для получения примера см. «Задержка сигнала с использованием дробной задержки многозадачности».
Объект интерполирует входной сигнал, чтобы получить новые выборки с нецелочисленными интервалами дискретизации. Можно задать свойство InterpolationMethod равным 'Linear', 'FIR', или 'Farrow'. Объект поддерживает изменяющиеся во времени значения задержки. То есть значение задержки может варьироваться в системе координат от выборки к выборке. Можно также задать максимальное значение задержки при помощи свойства MaximumDelay. Значения задержки, большие максимума, обрезаются до максимума.
Чтобы задержать вход на изменяющееся во времени дробное количество периодов дискретизации:
Создайте dsp.VariableFractionalDelay Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
vfd = dsp.VariableFractionalDelay
vfd = dsp.VariableFractionalDelay(Name,Value)
vfdOut = vfd(input,d)d выборки. d должно быть меньше или равно значению, заданному в свойстве MaximumDelay объекта.
Значения задержки, большие заданной максимальной задержки, подрезаются соответствующим образом. Каждый столбец входа рассматривается как независимый канал.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Задержка сигнала на меняющееся дробное число периодов дискретизации.
Примечание. Если вы используете R2016a или более ранний релиз, замените каждый вызов объекта эквивалентным step синтаксис. Для примера, obj(x) становится step(obj,x).
sr = dsp.SignalSource; vfd = dsp.VariableFractionalDelay; sink = dsp.SignalSink; for ii = 1:10 delayedsig = vfd(sr(), ii/10); sink(delayedsig); end sigd = sink.Buffer;
Область выхода sigd соответствует значениям задержанного сигнала, которые дискретизируются с фиксированными интервалами времени. Чтобы построить график моментов времени, в которые амплитуды выборок сигнала являются постоянными, обрабатывайте сигналы как моменты дискретизации.
stem(sr.Signal,1:10,'b') hold on; stem(sigd.',1:10,'r'); legend('Original signal', ... 'Variable fractional delayed signal', ... 'Location','best')

Примечание.Если вы используете R2016a или более ранний релиз, замените каждый вызов объекта эквивалентным синтаксисом шага. Например, obj (x) становится шагом (obj, x).
Задержка входного сигнала с помощью dsp.VariableFractionalDelay объект. Каждое значение задержки является уникальным и может варьироваться от выборки к выборке в системе координат и может варьироваться в разных каналах. Можно вычислить несколько задержанных версий одного и того же входного сигнала одновременно, передав задержку входа с соответствующей размерностью.
Считайте, что вход является случайным сигналом с одним каналом и форматом кадра 10. Применить задержку 4,8 и 8,2 выборки одновременно.
vfd = dsp.VariableFractionalDelay
vfd =
dsp.VariableFractionalDelay with properties:
InterpolationMethod: 'Linear'
InitialConditions: 0
MaximumDelay: 100
Show all properties
in = randn(10,1)
in = 10×1
0.5377
1.8339
-2.2588
0.8622
0.3188
-1.3077
-0.4336
0.3426
3.5784
2.7694
delayVec = [4.8 8.2]; outcase1 = vfd(in,delayVec)
outcase1 = 10×2
0 0
0 0
0 0
0 0
0.1075 0
0.7969 0
1.0153 0
-1.6346 0
0.7535 0.4301
-0.0065 1.5746
Каждый канал в выходе задерживается на 4,8 и 8,2 выборки, соответственно. Объект использует метод интерполяции 'Linear', чтобы вычислить задержанное значение. Для получения дополнительной информации смотрите 'Алгоритмы' в dsp.VariableFractionalDelay object page.
Для того же вектора задержки, если вход имеет 2 канала, каждый элемент вектора задержки применяется к соответствующему каналу во входе.
release(vfd); in = randn(10,2)
in = 10×2
-1.3499 0.6715
3.0349 -1.2075
0.7254 0.7172
-0.0631 1.6302
0.7147 0.4889
-0.2050 1.0347
-0.1241 0.7269
1.4897 -0.3034
1.4090 0.2939
1.4172 -0.7873
outcase2 = vfd(in,delayVec)
outcase2 = 10×2
0 0
0 0
0 0
0 0
-0.2700 0
-0.4729 0
2.5730 0
0.5677 0
0.0925 0.5372
0.5308 -0.8317
Чтобы вычислить несколько задержанные версии двумерного входного сигнала, передайте вектор задержки как трехмерный массив. Третья размерность содержит отводы или задержки для применения к сигналу. Если Вы передаете размерность трети неединичного предмета (1 на 1 на P), где P представляет количество сигналов, тот же сигнал применен через все каналы. Передайте задержки [4.8 8.2] в третьей размерности.
clear delayVec; delayVec(1,1,1) = 4.8; delayVec(1,1,2) = 8.2; whos delayVec
Name Size Bytes Class Attributes delayVec 1x1x2 16 double
delayVec массив 1 на 1 на 2. Передайте двумерный вход в dsp.VariableFractionalDelay объект с этим вектором задержки.
release(vfd); outcase3 = vfd(in,delayVec)
outcase3 =
outcase3(:,:,1) =
0 0
0 0
0 0
0 0
-0.2700 0.1343
-0.4729 0.2957
2.5730 -0.8225
0.5677 0.8998
0.0925 1.4020
0.5308 0.5981
outcase3(:,:,2) =
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
-1.0799 0.5372
2.1580 -0.8317
whos outcase3Name Size Bytes Class Attributes outcase3 10x2x2 320 double
outcase3(:,:,1) представляет входной сигнал, задержанный на 4,8 выборки. outcase3(:,:,2) представляет входной сигнал, задержанный на 8,2 выборки. Та же задержка применяется по всем каналам.
В сложение, если вы передаете не синглтонное второе измерение (1 на L-на-P), где L - количество входа каналов, ответвления варьируются между каналами. Примените векторы задержки [2.3 3,5] и [4.4 5.6], чтобы вычислить две задержанные версии входного сигнала.
clear delayVec; delayVec(1,1,1) = 2.3; delayVec(1,2,1) = 3.5; delayVec(1,1,2) = 4.4; delayVec(1,2,2) = 5.6; whos delayVec
Name Size Bytes Class Attributes delayVec 1x2x2 32 double
release(vfd); outcase4 = vfd(in,delayVec)
outcase4 =
outcase4(:,:,1) =
0 0
0 0
-0.9449 0
1.7195 0.3357
1.4183 -0.2680
0.1735 -0.2451
0.4814 1.1737
0.0709 1.0596
-0.1484 0.7618
1.0055 0.8808
outcase4(:,:,2) =
0 0
0 0
0 0
0 0
-0.8099 0
1.2810 0.2686
1.6492 -0.0801
0.2523 -0.4376
0.4036 1.0824
0.1629 1.1737
whos outcase4Name Size Bytes Class Attributes outcase4 10x2x2 320 double
outcase4(:,:,1) содержит входной сигнал, задержанный вектором [2.3 3.5]. outcase4(:,:,2) содержит входной сигнал, задержанный вектором [4.4 5.6].
Чтобы изменить задержку в систему координат от выборки к выборке, первая размерность вектора задержки (N-by-1-by-P или N-на-L-на-P) должен равняться формат кадра входа (N-на-L). Передайте вектор задержки размера 10 на 1 на 2.
clear delayVec; delayVec(:,1,1) = 3.1:0.1:4; delayVec(:,1,2) = 0.1:0.1:1; whos delayVec
Name Size Bytes Class Attributes delayVec 10x1x2 160 double
release(vfd); outcase5 = vfd(in,delayVec)
outcase5 =
outcase5(:,:,1) =
0 0
0 0
0 0
-0.8099 0.4029
0.8425 -0.2680
2.1111 -0.4376
0.4889 0.9911
0.0925 1.4020
0.6228 0.5435
-0.2050 1.0347
outcase5(:,:,2) =
-1.2149 0.6043
2.1580 -0.8317
1.4183 0.1398
0.2523 1.2650
0.3258 1.0596
0.3469 0.7072
-0.1807 0.9424
0.1986 0.5208
1.4816 -0.2437
1.4090 0.2939
Задержка изменяется для каждого элемента в канале. Один и тот же набор значений задержки применяется ко всем каналам. delayVec(:,1,1) применяется к первому задержанному сигналу и delayVec(:,1,2) применяется ко второму задержанному сигналу.
dsp.VariableFractionalDelay Системный объект поддерживает входные параметры переменного размера и сигналы задержки. То есть вы можете изменить размерность входного сигнала и сигнала задержки даже после вызова алгоритма. Вы можете изменить размерности одного или обоих сигналов одновременно. Вместе они должны убедиться, что количество выхода каналов (количество столбцов) остается постоянным.
Поддержка входного сигнала переменного размера
Количество выборок в каждой системе координат входного сигнала может измениться. Однако количество входа каналов должно оставаться постоянным.
Создайте dsp.VariableFractionalDelay объект. Передайте входной сигнал размера [256 1] и задержки 1,4 в алгоритм объекта. В последующих вызовах алгоритма измените размер входного кадра на 128, 512 и 64, соответственно
vfd = dsp.VariableFractionalDelay; vfd(randn(256,1),1.4); vfd(randn(128,1),1.4); vfd(randn(512,1),1.4); vfd(randn(64,1),1.4);
Выход формата кадра (количество строк) изменяется в соответствии с размером входного кадра. Количество выхода каналов в каждом из этих случаев равняется 1.
Чтобы изменить количество входных каналов, отпустите объект.
release(vfd);
Вызовите алгоритм с двухканальным входом и измените размер входного кадра при последующих вызовах.
vfd(randn(256,2),1.4); vfd(randn(128,2),1.4);
Поддержка сигнала задержки переменного размера
В дополнение к входу сигнал задержки также может изменяться. То есть можно изменить одну или обе размерности сигнала задержки после вызова алгоритма. Однако объект должен убедиться, что полученное количество выходных каналов остается постоянным. Сигнал задержки может быть скаляром, вектором, матрицей или N-D массивом.
release(vfd); vfd(randn(512,2),randn(512,2)); vfd(randn(128,2),[1.4 1.7]); vfd(randn(256,2),randn(256,1)); vfd(randn(128,2),1.4);
В каждом из этих случаев количество каналов выхода составляет 2. Чтобы применить различные задержки на входном сигнале, отпустите объект.
release(vfd); vfd(randn(256,1),randn(256,7)); vfd(randn(512,1),randn(512,7)); vfd(randn(100,1),randn(100,7)); vfd(randn(100,1),randn(1,7));
Выходные выходы в каждом из этих случаев: [256 7], [512 7], [100 7] и [100 7], соответственно.
Указания и ограничения по применению:
Смотрите Системные объекты в Генерации кода MATLAB (MATLAB Coder).
На схемах в следующих разделах показаны типы данных, используемые в dsp.VariableFractionalDelay объект для сигналов с фиксированной точкой.
Хотя можно задать большинство из этих типов данных, следующие типы данных вычисляются внутри объекта и не могут быть непосредственно заданы в интерфейсе объекта.
| Тип данных | Размер слова | Длина дроби |
|---|---|---|
| Тип данных vf | Размер слова коэффициентов | То же, что и размер слова |
| Тип данных HoldInteger | Тот же размер слова, что и входное значение задержки | 0 биты |
| Целочисленный тип данных | 32 биты | 0 биты |
Примечание
Когда вход является фиксированной точкой, все внутренние типы данных подписаны фиксированной точкой.
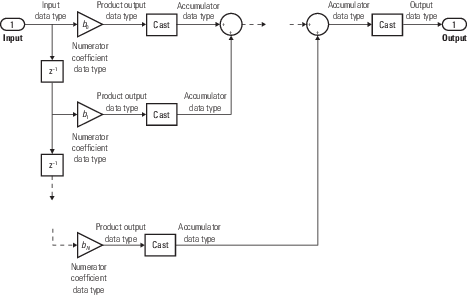
Следующая схема показывает типы данных с фиксированной точкой, используемые режимом линейной интерполяции алгоритма дробной задержки переменной.

Следующая схема иллюстрирует, как объект переменной дробной задержки выбирает плечо структуры полифазного фильтра, которое наиболее близко соответствует значению дробной задержки (vf).

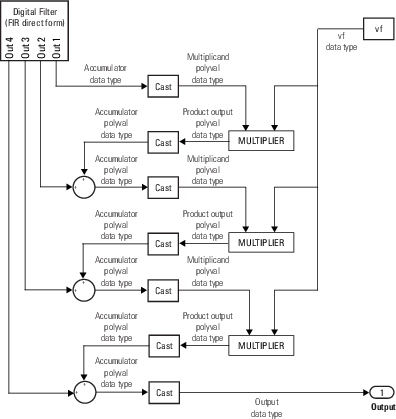
Следующая схема показывает типы данных с фиксированной точкой, используемые алгоритмом дробной задержки переменной в режиме интерполяции конечной импульсной характеристики.
Можно задать коэффициент, выход продукта, аккумулятор и типы выходных данных в объекте. Эта схема показывает, что входные данные хранятся во входном буфере с совпадающим типом данных и масштабированием, что и вход. Объект хранит отфильтрованные данные и любые начальные условия в буфере выхода с помощью заданных типа данных выходов и масштабирования.
Когда, по меньшей мере, один из входов в умножитель является вещественным, выход умножителя находится в типе выходных данных продукта. Когда оба входа в умножитель являются комплексными, результат умножения находится в типе данных аккумулятора. Для получения дополнительной информации о комплексном умножении смотрите Типы данных умножения.
Следующая схема показывает типы данных с фиксированной точкой, используемые режимом интерполяции Farrow, когда:
Длина фильтра Farrow установлена в 4
Действие малой задержки Farrow установлено в 'Clip to the minimum value necessary for centered kernel'
Следующая схема показывает типы данных с фиксированной точкой, используемые режимом интерполяции Farrow, когда:
Длина фильтра Farrow установлена в 4
Действие малой задержки Farrow установлено в 'Use off-centered kernel'
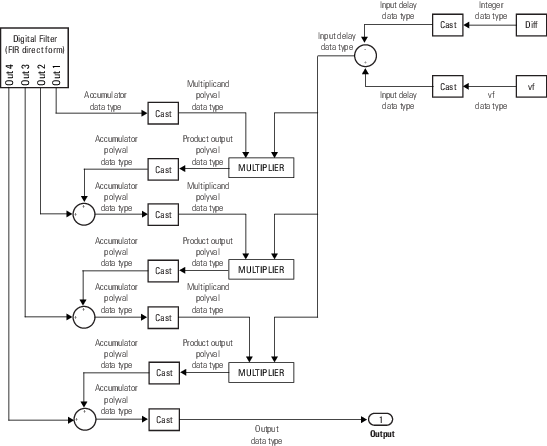
Diff вычисляется из целочисленной части значения задержки (vi) и длины фильтра наименьшей длины (N) согласно следующему уравнению:
Следующая схема показывает типы данных с фиксированной точкой, используемые конечной импульсной характеристикой фильтром прямых форм.