Нули , полюса и усиления в частотное преобразование M-диапазона
[Z2,P2,K2,AllpassNum,AllpassDen]
= zpklp2mb(Z,P,K,Wo,Wt)
[Z2,P2,K2,AllpassNum,AllpassDen]
= zpklp2mb(Z,P,K,Wo,Wt,Pass)
[Z2,P2,K2,AllpassNum,AllpassDen]
= zpklp2mb(Z,P,K,Wo,Wt) возвращает нули, Z2, полюса, P2, и коэффициент усиления, K2, целевой фильтр преобразован из реального прототипа lowpass путем применения Mреальный lowpass первого порядка в реальное мультидиапазонное частотное отображение. По умолчанию функция постоянного тока сохраняется в исходном местоположении.
[Z2,P2,K2,AllpassNum,AllpassDen]
= zpklp2mb(Z,P,K,Wo,Wt,Pass) позволяет вам задать дополнительный параметр, Pass, который выбирает между использованием «DC Mobility» и «Nyquist Mobility». В первом случае функция Nyquist остается в исходном местоположении, и функция DC свободно перемещается. Во втором случае функция постоянного тока сохранена на исходной частоте, и элементу Nyquist разрешено перемещаться.
Это также возвращает числитель, AllpassNumи знаменатель, AllpassDen, фильтра отображения allpass. Lowpass прототипа задается с нулями, Z, полюса, P, и коэффициент усиления, K.
Это преобразование эффективно помещает одну функцию исходного фильтра, расположенного на частоте Wo, в необходимые целевые местоположения частоты, Wt1,...,WtM.
Относительные положения других функций исходного фильтра не изменяются в целевом фильтре. Это означает, что можно выбрать две функции исходного фильтра, F1 и F2, со F1 предыдущими F2. F1 функций все еще будут предшествовать F2 после преобразования. Однако расстояние между F1 и F2 не будет одинаковым до и после преобразования.
Выбор функции, подлежащей этому преобразованию, не ограничивается частотой отключения исходного lowpass фильтра. В целом возможен выбор любой функции; например, ребро полосы стопора, DC, глубокий минимум в полосе стопора или другие таковые.
Это преобразование может также использоваться для преобразования других типов фильтров; например, узкополосные фильтры или резонаторы могут быть легко реплицированы в нескольких требуемых частотных местоположениях. Хорошим приложением будет адаптивная схема подавления тонального сигнала, реагирующая на изменение количества и местоположения тональных сигналов.
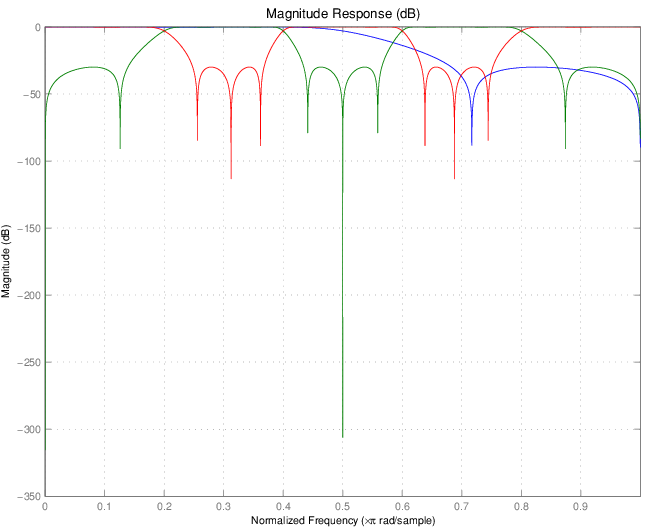
Разработайте прототип БИХ полуполосы фильтра с помощью стандартного эллиптического подхода:
[b, a] = ellip(3,0.1,30,0.409); z = roots(b); p = roots(a); k = b(1); [z1,p1,k1] = zpklp2mb(z, p, k, 0.5, [2 4 6 8]/10, 'pass'); [z2,p2,k2] = zpklp2mb(z, p, k, 0.5, [2 4 6 8]/10, 'stop');
Проверьте результат путем сравнения фильтра прототипа с целевым фильтром:
fvtool(b, a, k1*poly(z1), poly(p1), k2*poly(z2), poly(p2));
Получившийся многодиапазонный фильтр, который наследует функции из прототипа, появляется на рисунке. Обратите внимание на точность процесса репликации.
| Переменная | Описание |
|---|---|
Z | Нули lowpass прототипа |
P | Полюса lowpass прототипа |
K | Коэффициент усиления lowpass прототипа |
Wo | Значение частоты, которое будет преобразовано из фильтра прототипа |
Wt | Желаемое частотное положение в преобразованном целевом фильтре |
Pass | Выбор ( |
Z2 | Нули целевого фильтра |
P2 | Полюса целевого фильтра |
K2 | Коэффициент усиления целевого фильтра |
AllpassNum | Числитель фильтра отображения |
AllpassDen | Знаменатель фильтра отображения |
Частоты должны быть нормированы, чтобы быть между 0 и 1, с 1, соответствующим половине частоты дискретизации.
Franchitti, J.C., «All-pass filter interpolation and frequence transformation problems», MSc Thesis, Dept. of Electrical and Computer Engineering, University of Colorado, 1985.
Feyh, G., J.C. Franchitti and C.T. Mullis, «All-pass filter interpolation and frequency», Proceedings 20 Asilomar Conference on Signals, Systems and Computers, Pacific Grove, California, pp. 164-168, nul.
Mullis, C.T. and R.A. Roberts, Digital Signal Processing, Section 6.7, Reading, Massachusetts, Addison-Wesley, 1987.
Feyh, G., W.B. Jones and C.T. Mullis, расширение алгоритма Шура для преобразований частот, линейных схем, систем и обработки сигналов: теория и применение, C. J. Byrnes et al Eds, Amsterdam: Elsevier, 1988.
