Sensor Fusion and Tracking Toolbox™ позволяет моделировать инерциальные измерительные блоки (IMU), глобальные системы позиционирования (GPS) и инерционные навигационные системы (INS). Можно смоделировать конкретное оборудование, установив свойства ваших моделей на значения из таблиц данных оборудования. Можно настроить свойства окружающей среды и шума, чтобы имитировать реальные окружения. Можно использовать эти модели для тестирования и проверки алгоритмов слияния или в качестве заполнителей при разработке больших приложений.
В этом руководстве представлен обзор инерционных моделей датчика и GPS в Sensor Fusion and Tracking Toolbox.

Чтобы узнать, как сгенерировать движение «земля-правда», которое управляет моделями датчика, смотрите waypointTrajectory и kinematicTrajectory. Для руководства по плавлению данных инерционного датчика, смотрите Определить Ориентацию Используя Инерционные Датчики.
БИНС является электронным устройством, установленным на платформе. БИНС состоит из отдельных датчиков, которые сообщают различную информацию о движении платформы. БИНС объединяют несколько датчиков, которые могут включать акселерометры, гироскопы и магнитометры.
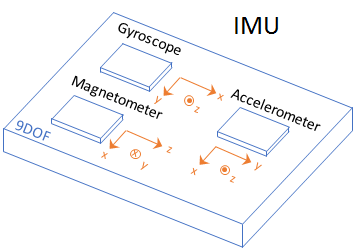
С помощью этого тулбокса измерения, возвращенные из модели IMU, используют следующие модули и соглашения о координатах.
| Выход | Описание | Модули | Система координат |
|---|---|---|---|
| Ускорение | Показания акселерометра тока | м/с2 | Тело датчика |
| Скорость вращения | Чтение гироскопа тока | рад/с | Тело датчика |
| Магнитное поле | Показания магнитометра тока | μT | Тело датчика |
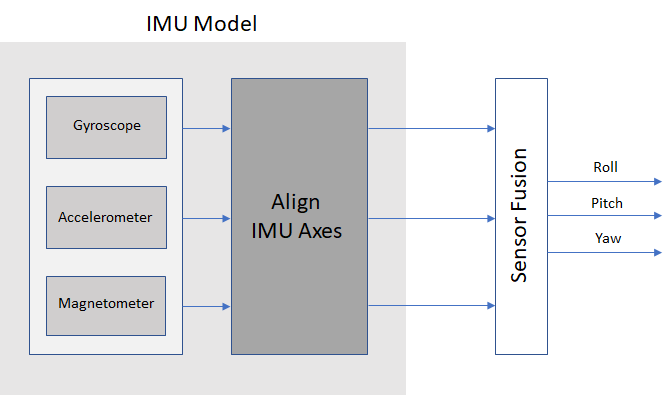
Обычно данные, возвращаемые БИНС, объединяются вместе и интерпретируются как крен, тангаж и рыскание платформы. Реальные датчики БИНС могут иметь различные оси для каждого из отдельных датчиков. Модели, предоставленные Sensor Fusion and Tracking Toolbox, предполагают, что отдельные оси датчика выровнены.
Чтобы создать модель датчика IMU, используйте imuSensor Системные object™.
IMU = imuSensor
IMU =
imuSensor with properties:
IMUType: 'accel-gyro'
SampleRate: 100
Temperature: 25
Accelerometer: [1×1 accelparams]
Gyroscope: [1×1 gyroparams]
RandomStream: 'Global stream'Модель IMU по умолчанию содержит идеальный акселерометр и идеальный гироскоп. The accelparams и gyroparams объекты определяют строение акселерометра и гироскопа. Можно задать свойства этих объектов, чтобы имитировать конкретное оборудование и окружения. Для получения дополнительной информации об объектах параметров БИНС смотрите accelparams, gyroparams, и magparams.
Чтобы смоделировать данные приемного датчика БИНС, вызовите модель БИНС с ускорением по основной истине и скоростью вращения платформы:
trueAcceleration = [1 0 0]; trueAngularVelocity = [1 0 0]; [accelerometerReadings,gyroscopeReadings] = IMU(trueAcceleration,trueAngularVelocity)
accelerometerReadings =
-1.0000 0 9.8100
gyroscopeReadings =
1 0 0Можно сгенерировать траектории основная истина, которые вы вводите в модель IMU с помощью kinematicTrajectory и waypointTrajectory.
Глобальная система позиционирования (GPS) обеспечивает 3-D информацию о положении для платформ (приемников) на поверхности Земли.
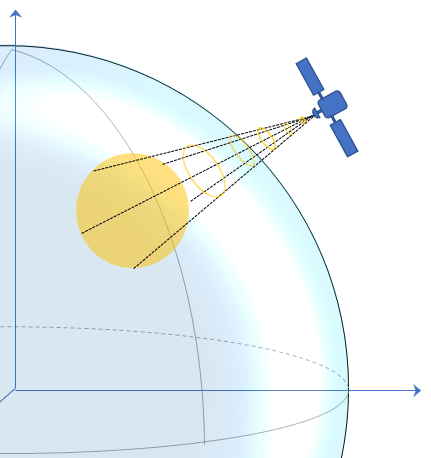
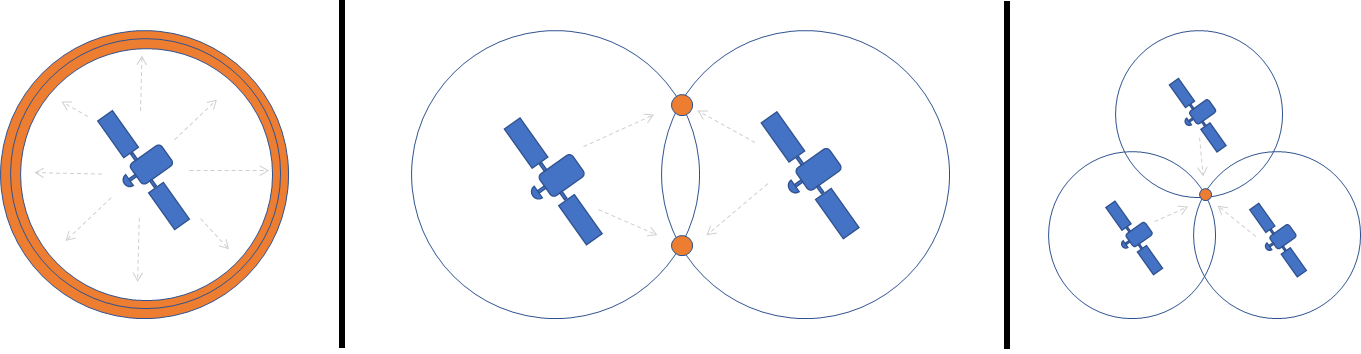
GPS состоит из созвездия спутников, которые постоянно вращаются вокруг Земли. Спутники поддерживают такое строение, что платформа всегда находится в пределах видимости по меньшей мере четырех спутников. Путем измерения времени рейса сигналов от спутников к платформе, положение платформы может быть трехсторонним. Спутники помечают время широковещательного сигнала, который сравнивается с часами платформы при получении. Три спутника требуются для трилатерации положения в трёх размерностях. Четвертый спутник необходим для исправления ошибок синхронизации часов между платформой и спутниками.
Симуляция GPS, обеспеченная моделями Sensor Fusion and Tracking Toolbox платформа (приемник) данные, которые были уже обработаны и интерпретировались как высота, широта, долгота, скорость, groundspeed, и курс.
Измерения, возвращенные из модели GPS, используют следующие единичные и координатные соглашения.
| Выход | Описание | Модули | Система координат |
|---|---|---|---|
| LLA | Текущее считывание глобального положения в геодезических координатах, основанное wgs84Ellipsoid модели Земли | степени (широта), степени (долгота), метры (высота) | LLA |
| Скорость | Показания скорости тока от GPS | м/с | локальный NED |
| Groundspeed | Текущее измерение скорости грунта от GPS | м/с | локальный NED |
| Курс | Чтение текущего курса из GPS | степени | локальный NED |
Модель GPS позволяет вам задать высокоуровневые параметры точности и шума, а также частоты обновления приемника и ссылки местоположение.
Чтобы создать модель GPS, используйте gpsSensor Системный объект.
GPS = gpsSensor
GPS =
gpsSensor with properties:
UpdateRate: 1 Hz
ReferenceLocation: [0 0 0] [deg deg m]
HorizontalPositionAccuracy: 1.6 m
VerticalPositionAccuracy: 3 m
VelocityAccuracy: 0.1 m/s
RandomStream: 'Global stream'
DecayFactor: 0.999 Чтобы смоделировать данные приемного GPS-датчика, вызовите модель GPS с основной истиной положением и скоростью платформы:
truePosition = [1 0 0]; trueVelocity = [1 0 0]; [LLA,velocity,groundspeed,course] = GPS(truePosition,trueVelocity)
LLA =
0.0000 0.0000 0.3031
velocity =
1.0919 -0.0008 -0.1308
groundspeed =
1.0919
course =
359.9566 Можно сгенерировать траектории основная истина, которые вы вводите в модель GPS с помощью kinematicTrajectory и waypointTrajectory.
Инерционная навигационная система (INS) использует инерционные датчики, подобные обнаруженным на БИНС: акселерометры, гироскопы и магнитометры. INS запирает данные инерционного датчика, чтобы вычислить положение, ориентацию и скорость платформы. INS/GPS использует данные GPS для исправления INS. Как правило, показания INS и GPS объединяются с расширенным фильтром Калмана, где показания INS используются на этапе предсказания, и показания GPS используются на этапе обновления. Общее использование для INS/GPS является мертвым расчетом, когда сигнал GPS ненадежен.
«INS/GPS» относится ко всей системе, включая фильтрацию. Симуляция INS/GPS, предоставляемая Sensor Fusion and Tracking Toolbox, моделирует INS/GPS и возвращает положение, скорость и ориентацию, сообщаемые инерционными датчиками и приемником, на основе движения « основной истины».
Измерения, возвращенные с INS/GPS, используют следующие модульные и координатные соглашения.
| Выход | Описание | Модули | Система координат |
|---|---|---|---|
| Положение | Чтение текущего положения от INS/GPS | метры | локальный NED |
| Скорость | Измерение скорости тока от INS/GPS | м/с | локальный NED |
| Ориентация | Чтение ориентации тока из INS/GPS | кватернион или матрица вращения | Н/Д |
Чтобы создать модель INS/GPS, используйте insSensor Системный объект. Можно смоделировать реальную систему INS/GPS путем настройки точности ваших сросшихся данных: крена, тангажа, рыскания, положения и скорости.
INS = insSensor
INS =
insSensor with properties:
RollAccuracy: 0.2 deg
PitchAccuracy: 0.2 deg
YawAccuracy: 1 deg
PositionAccuracy: 1 m
VelocityAccuracy: 0.05 m/s
RandomStream: 'Global stream' Чтобы смоделировать данные приемного датчика INS/GPS, вызовите модель INS/GPS с основной истиной положением и скоростью и ориентацией платформы:
trueMotion = struct( ... 'Position',[0 0 0], ... 'Velocity',[0 0 0], ... 'Orientation',quaternion(1,0,0,0)); measurement = INS(trueMotion)
measurement =
struct with fields:
Orientation: [1×1 quaternion]
Position: [0.2939 -0.7873 0.8884]
Velocity: [-0.0574 -0.0534 -0.0405]gpsSensor | imuSensor | insSensor
