Навигационное исправление на основе Меркатора
[latfix,lonfix] = navfix(lat,long,az)
[latfix,lonfix] = navfix(lat,long,range,casetype)
[latfix,lonfix] = navfix(lat,long,az_range,casetype)
[latfix,lonfix] = navfix(lat,long,az_range,casetype,drlat,drlon)
[latfix,lonfix] = navfix(lat,long,az) возвращает точки пересечения линий гребня, проведенных параллельно наблюдаемым подшипникам, az, из ориентиров, расположенных в точках lat и long и проходя через эти точки. Для каждой ориентира требуется по одному подшипнику. Каждое возможное сопряжение n ориентиров генерирует одно пересечение, поэтому общее количество результирующих точек пересечения является комбинаторным n выбором 2. Поэтому время вычисления быстро растет с n.
[latfix,lonfix] = navfix(lat,long,range,casetype) возвращает точки пересечения проекционных кругов Mercator с радиусами, заданными как range, с центром на ориентирах, расположенных в точках lat и long. Для каждого ориентира требуется одно значение области значений. Каждое возможное сопряжение n ориентиров генерирует до двух пересечений (круги могут пересекаться дважды), поэтому общее количество результирующих точек пересечения является комбинаторным 2 раза (n выбирает 2). Поэтому время вычисления быстро растет с n. В этом случае переменная casetype является вектором 0s того же размера, что и переменная range.
[latfix,lonfix] = navfix(lat,long,az_range,casetype) объединяет области значений и подшипники. Для каждого элемента casetype равный 1, соответствующий элемент az_range представляет азимут связанного ориентира. Где casetype является 0, az_range - область значений.
[latfix,lonfix] = navfix(lat,long,az_range,casetype,drlat,drlon) возвращает для каждого возможного сопряжения ориентиров только перекресток, который находится ближе всего к мертвой позиции расчета, обозначенной drlat и drlon. Когда используется этот синтаксис, все входные линии или дуги области значений включенных ориентиров должны пересекаться. Если возможный сбой сопряжения, предупреждение No Fix отображается.
Это навигационная функция. Он принимает, что все широты и долготы в степенях и все расстояния в морских милях. В навигации пилотирование является практикой фиксации своего положения на основе наблюдаемого подшипника и областей значений до фиксированных ориентиров (точки суши, маяки, дымовые трубы и т.д.) с судна штурмана. В соответствии с навигационной практикой подшипники обрабатываются как линии гребня, а области значений - как радиусы кругов на проекции Меркатора.
На практике для использования фиксации требуется по меньшей мере три азимута (подшипника) и/или области значений значений. Получившиеся пересечения вряд ли точно совпадут. Для получения более полного описания использования этой функции см. раздел «Навигация в Руководстве пользователя Mapping Toolbox».
Полный пример применения этой функции см. в разделе «Навигация» Руководства пользователя Mapping Toolbox.
Представьте, что у вас есть две ориентиры, на (15ºN,30.4ºW) и (14 .8ºN, 30 .1ºW). У вас есть визуальный подшипник к первому 280с и ко второму 160с. Кроме того, у вас есть область значений до секунды 12 нм. Найдите точки пересечения:
[latfix,lonfix] = navfix([15 14.8 14.8],[-30.4 -30.1 -30.1],...
[280 160 12],[1 1 0])
latfix =
14.9591 NaN
14.9680 14.9208
14.9879 NaN
lonfix =
-30.1599 NaN
-30.2121 -29.9352
-30.1708 NaNВот рисунок геометрии:
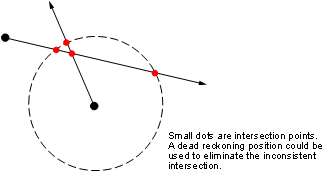
Традиционные графические изображения и navfix функция ограничена относительно короткими расстояниями. Визуальные подшипники на самом деле являются большими азимутами окружности, а не линиями гребня, и дуги области значений на самом деле являются дугами малых кругов, а не плоских кругов, нанесенных на графике. Однако механическая легкость процесса и практические пределы визуальных областей значений подшипников и навигационных радиолокационных областей значений (~ 30 нм) делают это ограничение спорным на практике. Ошибка, внесенная из-за этих предположений, незначительна в этой шкале.
Выходы этой функции являются матрицами, обеспечивающими местоположения пересечений для всех возможных пар n введенных линий подшипника и дуг области значений. Поэтому эти матрицы имеют n-choose-2 строки. В порядок, чтобы разрешить два пересечения на комбинацию, эти матрицы имеют два столбца. Всякий раз, когда для этой комбинации меньше двух пересечений, в этой строке возвращается один или два NaN.
Когда включена мертвая позиция расплаты, эти матрицы векторов-столбцов.
