В этом разделе показано, как сконфигурировать контроллер MPC для объекта, не являющегося объектом quare, с неодинаковым количеством управляемых переменных и выходов. Программное обеспечение Model Predictive Control Toolbox™ поддерживает объекты с избытком манипулируемых переменных или объекты с избытком выходов.
Когда есть избыточные выходы, вы не можете удерживать каждый в заданной точке. В этом случае у вас есть две опции:
Укажите, что определенные выходы не должны удерживаться в заданных точках, установив их веса настройки равными нулю.
Контроллер не применяет уставки к выходам с нулевым весом, и выходы могут свободно изменяться. Если объект имеет Ne больше выходы, чем управляемые переменные, установка Ne выхода весов, чтобы нуль, позволяет контроллеру удерживать оставшиеся выходы в своих уставках. Если какие-либо манипулированные переменные ограничены, один или несколько выходы ответов все еще могут демонстрировать установившуюся ошибку, в зависимости от величин ссылки и нарушения порядка сигналов.
Выходы с нулевыми весами настройки все еще могут быть полезны. Если измерено, контроллер может использовать выходы, чтобы помочь оценить состояние объекта. Выходы могут также использоваться в качестве показателей эффективности или удерживаться в рабочей области, заданной ограничениями выходного сигнала.
Применить уставки ко всем выходам путем определения ненулевых масс настройки для всех из них.
Контроллер пытается удерживать все выходы в соответствующих уставках. Однако из-за ограниченного количества манипулируемых переменных все выходные отклики показывают некоторую степень установившейся ошибки.
Можно изменить величины ошибок, скорректировав относительные значения выходных весов. Увеличение выходного веса уменьшает установившуюся ошибку в этом выходе за счет увеличения ошибки в других выходах.
Можно сконфигурировать выходы веса настройки в командной строке, установив Weights.OutputVariables свойство контроллера.
Чтобы сконфигурировать выходы веса настройки в MPC Designer, на вкладке Tuning, в разделе Design, нажмите Weights, чтобы открыть диалоговое окно Веса.
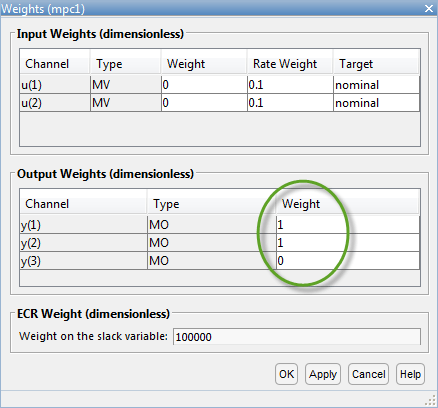
В Output Weights разделе задайте Weight для каждой выходной переменной. Для примера, если у вашего объекта есть две манипулируемые переменные и три выхода, можно:
Установите один из выходных весов равным нулю.
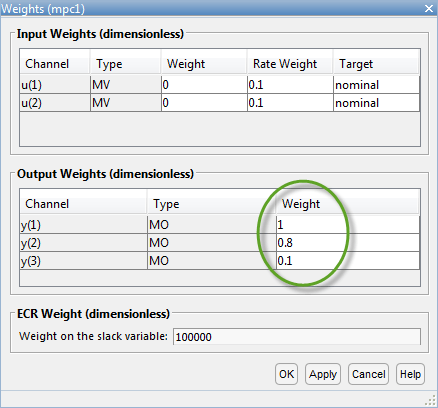
Установите все веса ненулевыми значениями. Выходы с более высокими весами показывают меньшую статическую ошибку.
Когда существуют чрезмерные манипулированные переменные, настройки контроллера MPC по умолчанию допускают отслеживание выхода уставки без ошибок. Однако значения манипулированных переменных могут дрейфовать. Можно предотвратить этот дрейф, задав заданные переменные. Если существует Ne избыточных манипулируемых переменных, и вы удерживаете Ne из них при целевых значениях по экономическим или операционным причинам, остальные манипулируемые переменные достигают значений, необходимых для устранения выходной статической ошибки.
Чтобы сконфигурировать управляемую уставку переменной в командной строке, используйте ManipulatedVariables.Target свойство контроллера. Затем задайте входной вес настройки с помощью контроллера Weights.ManipulatedVariables свойство.
Чтобы задать управляемую уставку переменной в MPC Designer, на вкладке Tuning, в разделе Design, нажмите Weights.
В диалоговом окне «Веса» в разделе Input Weights задайте ненулевое Weight значение для управляемой переменной.
Задайте Target значение для манипулируемой переменной.
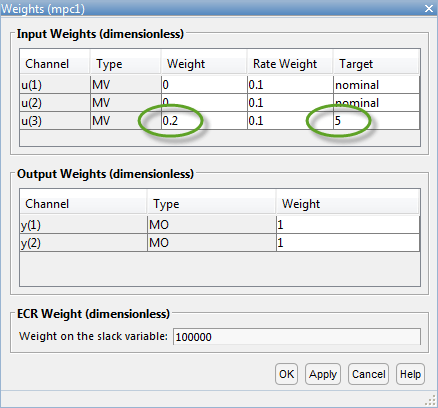
По умолчанию манипулируемая переменная Target nominal, что означает, что он отслеживает номинальное значение, заданное в свойствах контроллера.
Примечание
Поскольку номинальные значения применяются ко всем контроллерам в MPC Designer сеанса, изменение Nominal Value обновляет все контроллеры в приложении. Однако Target значение характерно для каждого отдельного контроллера.
Величина управляемого переменного веса указывает, насколько вход может отклониться от своей уставки. Однако существует компромисс между манипулируемым отслеживанием переменной цели и выходным отслеживанием уставки. Если вы хотите иметь лучшую эффективность отслеживания выходных уставок, используйте относительно небольшой входной вес. Если вы хотите, чтобы манипулируемая переменная оставалась близкой к своему целевому значению, увеличьте ее вход вес относительно выхода веса.
Можно также избежать дрейфа, ограничивая одну или несколько управляемых переменных узкой рабочей областью с помощью жестких ограничений. Чтобы задать ограничения в MPC Designer, на вкладке Tuning, в разделе Design, нажмите Constraints, чтобы открыть диалоговое окно Ограничения.
В Input Constraints разделе задайте Max и Min значения ограничений.
