В этой теме показано, как протестировать существующий прогнозирующий контроллер модели путем добавления его к Simulink® модель.
Откройте модель Simulink.
Добавьте блок MPC Controller к модели.
Если ваш контроллер включает измеренные нарушения порядка, добавьте md входной порт в блок MPC Controller.
Дважды кликните MPC Controller блок.
В диалоговом окне Параметров блоков на вкладке General выберите Measured disturbance (md).
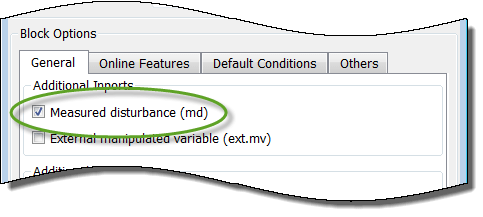
Нажмите OK.
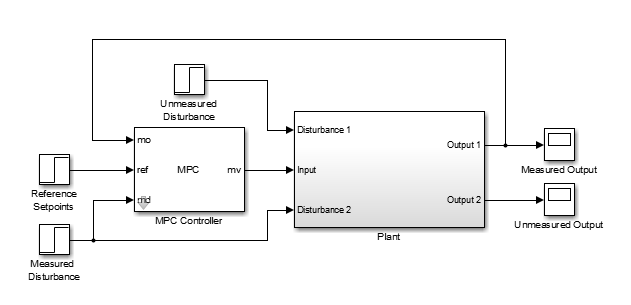
Соедините объект и сигналы контроллера в модели Simulink. Подключение:
Объект вводит управляемую переменную (mv) порт блока MPC Controller.
Объект измерил выходы на измеренный выход (mo) порт блока MPC Controller.
Измеренные нарушения порядка, если таковые имеются, для объекта и к измеренному нарушению порядка (md) порт блока MPC Controller.
Любые неизмеренные нарушения порядка или неизмеренные выходы для соответствующих входных и выходных портов объекта.
Опорные сигналы к ссылке (ref) порт блока MPC Controller.
Укажите контроллер.
Дважды кликните MPC Controller блок.
В диалоговом окне Параметров блоков, в поле MPC Controller, задайте имя mpc контроллер от MATLAB® рабочей области.
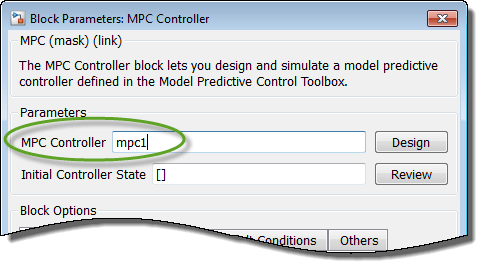
Нажмите OK.
(Необязательно) Измените контроллер.
После определения контроллера в блоке MPC Controller можно изменить контроллер:
Использование MPC Designer:
В диалоговом окне Параметров блоков нажмите Design.
В MPC Designer настройте параметры контроллера.
На вкладке MPC Designer, в разделе Result, нажмите Update and Simulate > Update Block Only.
Приложение экспортирует обновленный контроллер в рабочее пространство MATLAB.
Использование команд для изменения объекта контроллера в рабочем пространстве MATLAB.
Запустите модель Simulink.
Совет
Если у вас нет модели Simulink вашего объекта, можно сгенерировать модель, которая использует ваш контроллер MPC для управления его внутренней моделью объекта управления. Для получения дополнительной информации см. «Генерация модели Simulink из MPC Designer».
mpc | MPC Controller | MPC Designer
