Как объяснено в Задаче Оптимизации, wy, wu, и w∆u веса могут меняться от одного шага в горизонте предсказания к следующему. Такой time-varying weight является массивом, содержащим p строки, где p - горизонт предсказания, и ny или nu столбцы (количество OV или MV).
Использование изменяющихся во времени весов обеспечивает дополнительные возможности настройки. Однако это усложняет настройку. Рекомендуемая практика состоит в том, чтобы использовать постоянные веса, если ваше приложение не включает необычные характеристики. Для примера в приложении, требующем веса терминалов, должны использоваться изменяющиеся во времени веса. См. раздел «Веса и ограничения клемм».
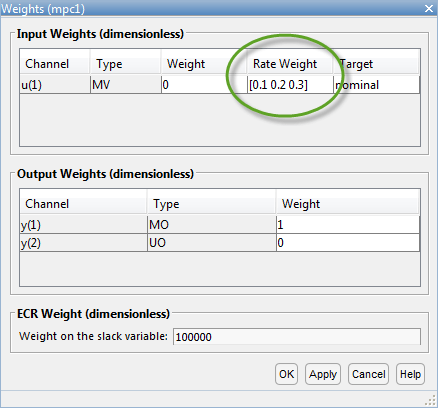
Можно задать изменяющиеся во времени веса в MPC Designer. В диалоговом окне «Веса» задайте изменяющийся во времени вес в качестве вектора. Каждый элемент вектора соответствует одному шагу в горизонте предсказания. Если длина вектора меньше p, последнее значение веса применяется для оставшейся части горизонта предсказания.
Примечание
Для любого заданного входного канала можно задать различные длины вектора для Rate Weight и Weight. Однако, если вы задаете изменяющуюся во времени Weight для любого входного канала, необходимо задать изменяющуюся во времени Weight для всех входов, используя векторы веса той же длины. Точно так же все входные Rate Weight значения должны использовать одну и ту же длину вектора.
Кроме того, если вы задаете изменяющуюся во времени Weight для любого выходного канала, необходимо задать изменяющуюся во времени Weight для всех выходов, используя векторы веса той же длины.
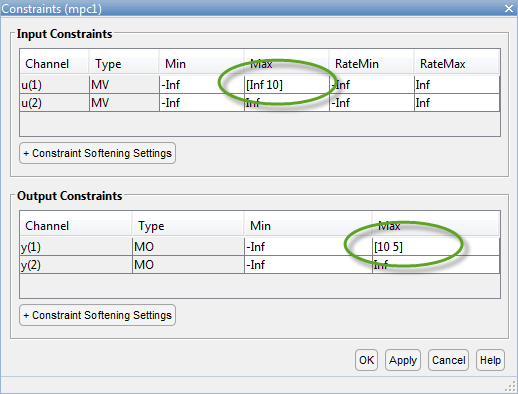
При ограничении шага MV, OV или MV можно использовать другое связанное значение на каждом шаге прогнозирования-горизонта. Для этого задайте границу как вектор до p значений, где p - длина горизонта предсказания (количество контрольных интервалов). Если вы задаете n < p значения, n-е значение применяется для остальных p - n шагов .
Можно удалить ограничения на выбранных шагах, задав Inf (или -Inf).
Если задержки объекта мешают MV влиять на OV во время первых d шагов горизонта предсказания, и вы должны включать ограничения на этом OV, оставьте OV без ограничений для первых d шагов.
Можно задать изменяющиеся во времени ограничения в MPC Designer. В диалоговом окне «Ограничения» задайте вектор для каждого изменяющегося во времени ограничения.