Вставьте луч из наблюдения лазерного скана
insertRay( вставляет одно или несколько наблюдений датчика скана лидара в сетку заполнения, map,pose,scan,maxrange)map, с использованием входа lidarScan объект, scan, чтобы получить конечные точки луча. Конечные точки луча считаются свободным пространством, если входные области значений скана ниже maxrange. Камеры, наблюдаемые как занятые, обновляются наблюдением 0,7. Все другие точки вдоль луча обрабатываются как препятствия без и обновляются наблюдением 0,4. Конечные точки выше maxrange не обновляются. NaN значения игнорируются. Это поведение коррелирует с обратной моделью датчика.
insertRay(___, вставляет лучи с обновленными вероятностями, заданными в двухэлементном векторе, invModel)invModel, что соответствует свободным от препятствий и занятым наблюдениям. Используйте любой из предыдущих синтаксисов для ввода лучей.
Создайте пустую сетку заполнения.
map = occupancyMap(10,10,20);
Входное положение транспортного средства, области значений, углы и максимальная область значений лазерного скана.
pose = [5,5,0]; ranges = 3*ones(100,1); angles = linspace(-pi/2,pi/2,100); maxrange = 20;
Создайте lidarScan объект с заданными областями и углами.
scan = lidarScan(ranges,angles);
Вставьте данные лазерного скана в карту заполнения.
insertRay(map,pose,scan,maxrange);
Отобразите карту, чтобы увидеть результаты вставки лазерного скана.
show(map)

Проверить заполнение места непосредственно перед транспортным средством.
getOccupancy(map,[8 5])
ans = 0.7000
Добавьте второе чтение и просмотрите обновление значений заполнения. Дополнительное чтение повышает доверие в показаниях. Свободные и занятые значения становятся более четкими.
insertRay(map,pose,scan,maxrange); show(map)

getOccupancy(map,[8 5])
ans = 0.8448
inverse sensor model определяет, как значения устанавливаются вдоль луча от считывания датчика области значений до препятствий на карте. Можно настроить эту модель, задав различные вероятности для свободных и занятых местоположений в invModel аргумент. NaN значения области значений игнорируются. Области значений, больше maxrange не обновляются.
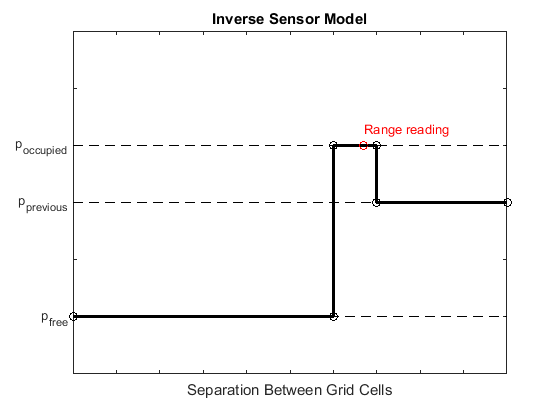
Местоположения сетки, содержащие показания области значений, обновляются с занятой вероятностью. Местоположения перед чтением обновляются с свободной вероятностью. Все местоположения после чтения не обновляются.
