Интегрирование наблюдений вероятностей в местоположениях
updateOccupancy( вероятностно интегрирует матрицу значений заполнения, map,occMatrix)occMatrix, с текущей матрицей заполнения occupancyMap map объекта. Размер матрицы должен быть равен GridSize свойство карты.
updateOccupancy( вероятностно интегрирует значения наблюдений, map,locations,obs)obs, в камеры карты заполнения, соответствующие матрице n -на-2 мировых координат locations. Значения наблюдений определяются на основе модели обратного датчика.
updateOccupancy( вероятностно интегрирует m -by - n матрицу значений наблюдений, map,bottomLeft,obsMatrix)obsMatrix, в субрегион на карте. Задайте нижний левый угол субрегиона как мировое положение, bottomLeft. Субрегион простирается m строки вверх и n столбцы вправо от заданного положения.
updateOccupancy( вероятностно интегрирует m -by - n матрицу значений наблюдений, map,bottomLeft,obsMatrix,'world')obsMatrix, в субрегион на карте. Задайте нижний левый угол субрегиона как мировое положение, bottomLeft. Субрегион простирается m строки вверх и n столбцы вправо от заданного положения.
updateOccupancy( вероятностно интегрирует m -by - n матрицу значений наблюдений, map,bottomLeft,obsMatrix,'local')obsMatrix, в субрегион на карте. Задайте нижний левый угол субрегиона как локальное положение, bottomLeft. Субрегион простирается m строки вверх и n столбцы вправо от заданного положения.
Создайте пустую карту размером 10 на 10 метров.
map = occupancyMap(10,10,10);
Обновите заполнение конкретных мировых местоположений с новыми значениями вероятностей и отобразите карту.
x = [1.2; 2.3; 3.4; 4.5; 5.6]; y = [5.0; 4.0; 3.0; 2.0; 1.0]; pvalues = [0.2; 0.4; 0.6; 0.8; 1]; updateOccupancy(map,[x y],pvalues) figure show(map)

Надьте занятые области на радиус 0,5 м. Большие значения заполнения перезаписывают меньшие значения.
inflate(map,0.5) figure show(map)

Получите местоположения сетки из мировых местоположений.
ij = world2grid(map,[x y]);
Установите значения заполнения для местоположений сетки.
setOccupancy(map,ij,ones(5,1),'grid')
figure
show(map)
Модель обратного датчика определяет, как значения устанавливаются вдоль луча от чтения датчика области значений до препятствий на карте. NaN значения области значений игнорируются. Области значений, больше maxrange не обновляются.
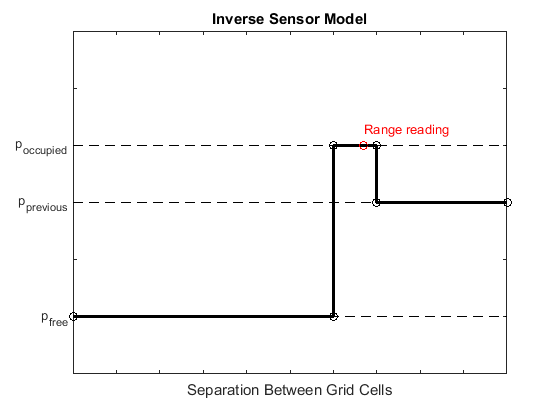
Местоположения сетки, содержащие показания области значений, обновляются с занятой вероятностью. Местоположения перед чтением обновляются с свободной вероятностью. Все местоположения после чтения не обновляются.
