

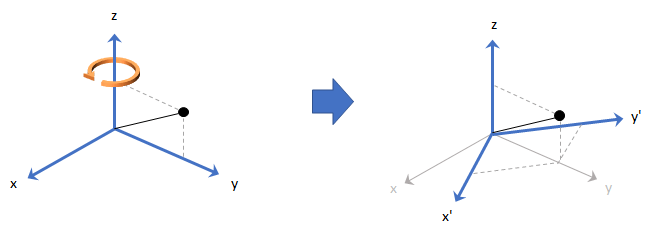
Вращение кватернионной системы координат
rotationResult = rotateframe(quat,cartesianPoints)quat. Элементы кватерниона нормированы перед использованием во вращении.
Задайте точку в трёх размерностях. Координаты точки всегда заданы в порядок x , y и z. Для удобной визуализации задайте точку на плоскости x-y.
x = 0.5; y = 0.5; z = 0; plot(x,y,'ko') hold on axis([-1 1 -1 1])

Создайте вектор кватерниона, задающий два отдельных поворота, один для поворота системы координат на 45 степени и другой для поворота точки на -90 степени вокруг оси Z. Использование rotateframe для выполнения вращений.
quat = quaternion([0,0,pi/4; ... 0,0,-pi/2],'euler','XYZ','frame'); rereferencedPoint = rotateframe(quat,[x,y,z])
rereferencedPoint = 2×3
0.7071 -0.0000 0
-0.5000 0.5000 0
Постройте график повторных точек.
plot(rereferencedPoint(1,1),rereferencedPoint(1,2),'bo') plot(rereferencedPoint(2,1),rereferencedPoint(2,2),'go')

Задайте две точки в 3-мерном пространстве. Задайте кватернион, чтобы переопределить точки путем поворота опорной системы координат вокруг оси Z на 30 степени, а затем вокруг новой оси Y на 45 степени.
a = [1,0,0]; b = [0,1,0]; quat = quaternion([30,45,0],'eulerd','ZYX','point');
Использование rotateframe для ссылки на обе точки с помощью оператора вращения кватерниона. Отобразите результат.
rP = rotateframe(quat,[a;b])
rP = 2×3
0.6124 -0.3536 0.7071
0.5000 0.8660 -0.0000
Визуализируйте исходную ориентацию и повернутую ориентацию точек. Нарисуйте линии от источника до каждой из точек в целях визуализации.
plot3(a(1),a(2),a(3),'bo'); hold on grid on axis([-1 1 -1 1 -1 1]) xlabel('x') ylabel('y') zlabel('z') plot3(b(1),b(2),b(3),'ro'); plot3(rP(1,1),rP(1,2),rP(1,3),'bd') plot3(rP(2,1),rP(2,2),rP(2,3),'rd') plot3([0;rP(1,1)],[0;rP(1,2)],[0;rP(1,3)],'k') plot3([0;rP(2,1)],[0;rP(2,2)],[0;rP(2,3)],'k') plot3([0;a(1)],[0;a(2)],[0;a(3)],'k') plot3([0;b(1)],[0;b(2)],[0;b(3)],'k')

Вращение кватернионной системы координат повторно ссылается на точку, заданную в R3 путем поворота исходной системы координат ссылки согласно заданному кватерниону:
где q - кватернион, * представляет сопряжение, а u - точка вращения, заданная как кватернион.
Для удобства, rotateframe функция принимает точку в R3 и возвращает точку в R3. Учитывая вызов функции с некоторым произвольным кватернионом, q = a + b я + <reservedrangesplaceholder4> j + <reservedrangesplaceholder3> k и произвольная координата, [x, y, z],
point = [x,y,z]; rereferencedPoint = rotateframe(q,point)
rotateframe функция выполняет следующие операции:
Преобразует точку [x, y, z] в кватернион:
Нормализует кватернион, q:
Применяет вращение:
Преобразует кватернион, выход vq, назад в R3