Двумерный постоянный детектор частоты ложных предупреждений (CFAR)
Phased Array System Toolbox/Обнаружение
Блок 2-D CFAR Detector реализует постоянный детектор скорости ложного предупреждения для двухмерных данных изображения. Обнаружение объявляется, когда значение камеры изображения превышает порог. Чтобы поддерживать постоянную частоту ложных предупреждений, порог устанавливается на значение, кратное степени шума изображения. Детектор оценивает степень шума от соседних камер, окружающих испытываемую ячейку (CUT), используя один из трех методов усреднения камеры или метод статистики порядка. Способами усреднения ячейки являются среднее по ячейкам (CA), наибольшее среднее по камерам (GOCA) или наименьшее среднее по камерам (SOCA).
Для каждой тестовой камеры детектор:
оценивает статистику шума из значений камер в обучающей полосе, окружающей камеру CUT.
вычисляет порог путем умножения оценки шума на пороговый коэффициент.
сравнивает значение камеры CUT с порогом, чтобы определить, присутствует ли цель или отсутствует. Если значение больше порога, присутствует цель.
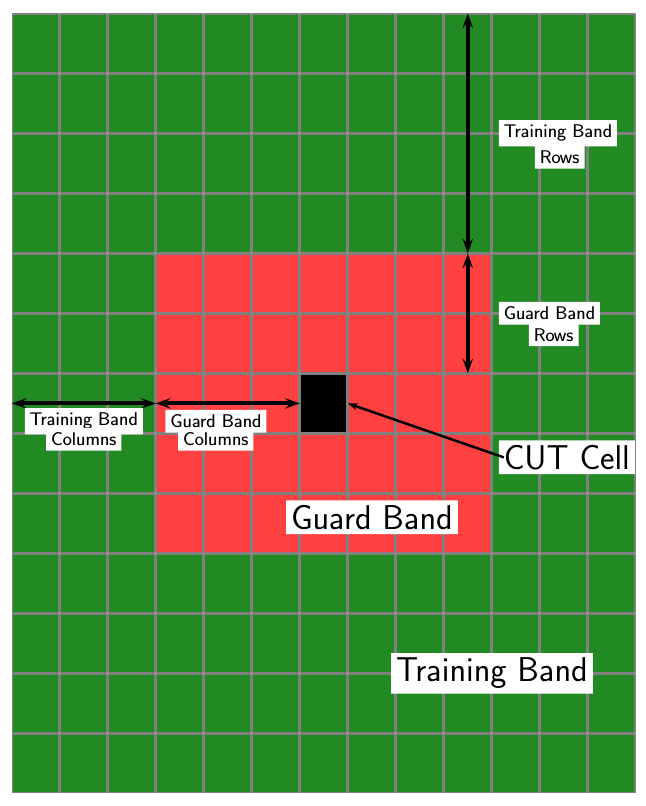
CFAR 2-D требует оценки степени шума. Степень шума вычисляется из камер, которые приняты, что не содержат никакого целевого сигнала. Эти камеры являются training cells. Обучающие камеры образуют полосу вокруг тестируемой ячейки (CUT), но могут быть отделены от CUT камеры защитной полосой. Порог обнаружения вычисляется путем умножения степени шума на пороговый коэффициент.
Для усреднения GOCA и SOCA степень определяется средним значением одной из левой или правой половин области обучающей камеры.
Поскольку количество столбцов в области обучения нечетно, камеры в среднем столбце присваиваются равной либо левой, либо правой половине.
При использовании метода order-statistic ранг не может быть больше, чем количество камер в области обучающих камер, Ntrain. Можно вычислить Ntrain.
NTC - количество обучающих полосных столбцов.
NTR - количество обучающих строк полосы.
NGC - количество защитных полосных столбцов.
NGR - количество строк защитной полосы.
Общее количество камер в объединенной области обучения, защитной области и камере CUT Ntotal = (2NTC + 2NGC + 1)(2NTR+ 2NGR + 1).
Общее количество камер в объединенной защитной области и камере CUT Nguard = (2NGC + 1)(2NGR + 1).
Количество обучающих камер Ntrain = Ntotal – Nguard.
По конструкции количество обучающих камер всегда ровное. Поэтому для реализации медианного фильтра можно выбрать ранг Ntrain/2 или Ntrain/2 + 1.
