Линейный привод с перемещением поршня, управляемым две противоположных емкости с тепловой жидкостью
Simscape/Жидкости/Тепловая жидкость/Приводы
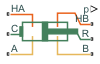
Блок Double-Acting Actuator (TL) моделирует линейный привод с перемещением поршня, управляемым две противоположных емкости с тепловой жидкостью. Привод генерирует силу в штрихах выдвижения и уборки. Создаваемая сила зависит от различия давления между двумя ёмкостями.
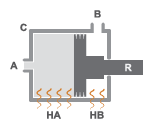
Рисунок показывает ключевые компоненты модели привода. Порты A и B представляют входные отверстия терможидкой ёмкости. Порт R представляет собой поршень привода и порт C корпуса привода. Порты HA и HB представляют тепловые интерфейсы между каждой ёмкостью и окружением. Движущийся поршень является адиабатическим.
Схема привода двойного действия
Перемещение поршня измеряется как положение на порте R относительно порта C. Этот Mechanical orientation определяет направление перемещения поршня. Перемещение поршня рассматривается нейтральным, или 0, когда объем ёмкости A равен мертвому объему ёмкости. Когда перемещение принято как вход, убедитесь, что производная положения равна скорости поршня. Это автоматически происходит, когда вход получен от соединения блока Translational Multibody Interface с соединением Simscape Multibody.
Направление перемещения поршня зависит от настройки механической ориентации в диалоговом окне блока. Если механическая ориентация положительная, то более высокое давление в порте A приводит к положительному перемещению поршня относительно корпуса привода. Направление движения изменяет противоположное для отрицательной механической ориентации.
Набор жёстких упоров ограничивает область значений движения поршня. Жёсткие упоры рассматриваются как системы пружин-демпферов. Коэффициент жесткости пружины управляет восстановительным компонентом силы контакта с жёстким упором и коэффициентом демпфирования рассеивающего компонента.
Жёсткие упоры расположены на дистальных концах штриха поршня. Если механическая ориентация положительная, то нижний жёсткий упор на x = 0 и верхний жёсткий упор на x = + stroke. Если механическая ориентация отрицательная, то нижний жёсткий упор на x = - stroke и верхний жёсткий упор на x = 0.
Этот блок является составным компонентом, основанным на блоках Simscape™ Foundation:
Составная компонентная схема
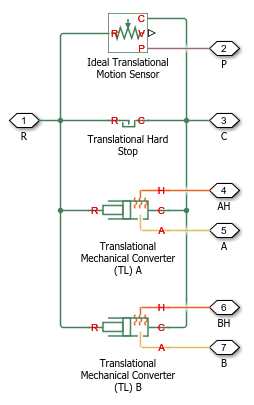
А - порт терможидкости, представляющий полость привода
B - Порт терможидкости, представляющий полость привода
C - Механический порт, представляющий корпус привода
R - Механический порт, представляющий поршень привода
HA - Тепловой порт, представляющий тепловой интерфейс между ёмкостью A и окружением
HB - Тепловой порт, представляющий тепловой интерфейс между ёмкостью B и окружением
p - Входной порт физического сигнала для данных о положении поршня. Чтобы открыть этот порт, установите Piston displacement from chamber A cap равным Provide input signal from Multibody joint.
p - Выходной порт физического сигнала для данных о положении поршня. Чтобы открыть этот порт, установите Piston displacement from chamber A cap равным Calculate from velocity of port R relative to port C.
Ориентация поршня привода относительно направления потока. Положительная ориентация заставляет поршень двигаться в положительном направлении относительно корпуса привода в ответ на положительную скорость потока жидкости через порт А. Настройка по умолчанию Pressure at A causes positive displacement of R relative to C.
Механическая ориентация влияет на размещение жёстких упоров привода. Один жёсткий упор всегда находится в нулевом положении. Второй жёсткий упор находится на расстоянии штриха поршня, если механическая ориентация положительная, и на минусе расстояния штриха поршня, если механическая ориентация отрицательная.
Площадь, нормальная к направлению потока в полость привода А. Блок использует эту площадь, чтобы вычислить гидравлическую силу из-за давления жидкости в ёмкость А. Площадь поперечного сечения поршня должна быть больше нуля. Значение по умолчанию 0.01 м ^ 2.
Площадь, нормальная к направлению потока в полости привода. Блок использует эту площадь, чтобы вычислить гидравлическую силу от давления жидкости в ёмкости В. Площадь поперечного сечения поршня должна быть больше нуля. Значение по умолчанию 0.01 м ^ 2.
Максимальное расстояние, на которое может перемещаться поршень привода. Штрих поршня должен быть больше нуля. Значение по умолчанию 0.1 м.
Жёсткие упоры ограничивают перемещение поршня длиной штриха поршня. Один жёсткий упор расположен в нулевом положении. Второй жёсткий упор находится на расстоянии штриха поршня, если Mechanical Orientation установлено на Pressure at A causes positive displacement of R relative to C и при минусе штрих поршня, если Mechanical Orientation установлен на Pressure at A causes negative displacement of R relative to C.
Объем жидкости, остающийся в полости привода при нулевом перемещении поршня. Блок использует этот объем для расчета массы и накопления энергии в ёмкости А, когда поршень находится в нулевом положении. Мертвый объем должен быть больше нуля. Значение по умолчанию 1e-5 м ^ 3.
Объем жидкости, остающийся в полости привода при нулевом перемещении поршня. Блок использует этот объем для расчета массы и накопления энергии в ёмкости B, когда поршень находится в нулевом положении. Мертвый объем должен быть больше нуля. Значение по умолчанию 1e-5 м ^ 3.
Выбор давления окружения. Опции включают Atmospheric pressure и Specified pressure. Выбор Specified pressure предоставляет дополнительный параметр, Environment pressure.
Давление снаружи корпуса привода. Это давление воздействует на давления внутри полостей привода. Значение нуля соответствует вакууму. Значение по умолчанию 0.101325 МПа. Этот параметр видим, только когда Environment pressure specification установлено на Specified pressure.
Пружинный коэффициент жёстких упоров привода. Пружинный коэффициент учитывает восстановительный фрагмент силы контакта с жёстким упором. Увеличьте значение коэффициента, чтобы смоделировать более жесткий контакт. Значение по умолчанию 1e10 Н/м.
Коэффициент демпфирования жёстких упоров привода. Коэффициент демпфирования учитывает рассеивающий фрагмент силы контакта с жёстким упором. Увеличьте значение коэффициента, чтобы уменьшить отскок при контакте. Значение по умолчанию 150 Н/( м/с).
Методы моделирования для жёстких упоров. Опции включают:
Stiffness and damping applied smoothly through transition region (по умолчанию) - Масштабируйте амплитуду контактной силы от нуля до ее полного значения на заданной длине перехода. Масштабирование носит полиномиальный характер. Функция масштабирования полинома численно сглажена и не производит нулевых пересечений любого вида.
Full stiffness and damping applied at bounds, undamped rebound - Приложите полное значение расчетной контактной силы при нарушении местоположения жёсткого упора. Сила контакта представляет собой смесь пружины и демпфирующих сил во время проникновения и упругой силы - без демпфирующей составляющей - во время отскока. Сглаживание не применяется.
Full stiffness and damping applied at bounds, damped rebound - Приложите полное значение расчетной контактной силы при нарушении местоположения жёсткого упора. Сила контакта представляет собой смесь пружины и демпфирующих сил во время как проникновения, так и отскока. Сглаживание не применяется. Это жёсткий упор, используемая в предыдущих релизах.
Расстояние, ниже которого масштабирование прикладывается к жёсткому упору. Сила контакта равна нулю, когда расстояние до жёсткого упора равно значению, заданному здесь. Это при полном значении, когда расстояние до жёсткого упора равняется нулю. Значение по умолчанию 1 mm.
Метод определения положения поршня. Блок может получить положение от блока Multibody, когда установлено на Provide input signal from Multibody joint. Значение по умолчанию Calculate from velocity of port R relative to port C.
Положение поршня в начале симуляции. Это значение должно быть между нулем и штрихом поршня, если параметр Mechanical orientation установлен в Pressure at A causes positive displacement of R relative to C. Это должно быть между нулем и минусом штриха поршня, если параметр Mechanical orientation установлен в Pressure at A causes negative displacement of R relative to C. Значение по умолчанию 0 m. Чтобы включить этот параметр, установите Piston displacement from chamber A cap равным Calculate from velocity of port R relative to port C.
Температура в полости привода в начале симуляции. Значение по умолчанию 293.15 K.
Температура в полости привода в начале симуляции. Значение по умолчанию 293.15 K.
Опция для моделирования эффектов из-за динамической сжимаемости жидкости. Выберите On для обеспечения гидродинамической сжимаемости и Off чтобы отключить его.
Давление в полости привода в начале симуляции. Значение по умолчанию 0.101325 МПа.
Давление в полости привода в начале симуляции. Значение по умолчанию 0.101325 МПа.

