Гидравлический клапан двойного привода
Приводы клапанов

Используйте Hydraulic Double-Acting Valve Actuator блок в качестве управляемого привода для наклонных, напорных или регулирующих поток клапанов в приложениях, где можно пренебрегать всеми силами, кроме упругой силы и расхода. Привод состоит из двух приводов одностороннего действия, действующих друг против друга. Каждый односторонний привод состоит из поршня, центрирующей пружины и центрирующей шайбы. Когда давление управления прикладывается к любому гидравлическому порту, только одна центрирующая пружина сжимается своей шайбой, в то время как другая прилегает к корпусу клапана и не оказывает никакой силы на золотник. Когда оба давления управления сбрасываются, пружины прижимают шайбы к корпусу клапана, и золотник центрируется между ними. Этот проект позволяет каждому приводу иметь разную пружину, усилие предварительной нагрузки и площадь базового поршня.
Когда давление, приложенное к поршню, создает достаточную силу для преодоления предварительной нагрузки пружины, поршень переходит в противоположное положение до достижения максимального штриха. Давление, приложенное к порту X, смещает клапан в x-направление, преодоление пружины, расположенной в ёмкости Y. Давление, приложенное к порту Y, смещает клапан в y-направление, преодоление пружины, расположенной в ёмкости X.
Привод моделируется согласно следующим уравнениям:
Если F > = 0 ,
Если F < 0,
где
| F | Сила, действующая на клапан |
| s | Перемещение поршня |
| px | Давление в ёмкости X привода |
| py | Давление в ёмкости Y привода |
| Ax | Площадь поверхности клапана в ёмкости X |
| Ay | Площадь торца клапана в ёмкости Y |
| strx | Штрих клапана в x- направление |
| stry | Штрих клапана в y- направление |
| Fprx | Ёмкость X предварительных поджатий пружины |
| Fmaxx | Максимальная сила пружины в полости X |
| Fpry | Ёмкость Y предварительного поджатия пружины |
| Fmaxy | Максимальная сила пружины ёмкости Y |
| or | Ориентация привода относительно глобально присвоенного положительного направления. Если давление, приложенное к порту X, перемещает поршень в положительном направлении, or равняется 1. Если давление, приложенное к порту X, перемещает поршень в отрицательном направлении, or равняется -1. |
Связи X и Y являются гидравлическими портами, сопоставленными с ёмкостями клапана. Связь P является портом физического сигнала, выход которого соответствует перемещению поршня. Давление, приложенное к порту X, перемещает поршень в положительном или отрицательном направлении в зависимости от значения параметра Actuator orientation.
Расход потока, связанный с движением клапана, принимается незначительным.
Инерция, трение и гидравлические осевые силы приняты малыми и не учитываются.
Зазоры между клапаном и шайбами не учитываются.
Эффективная площадь базового поршня в порте X. Значение параметров должно быть больше нуля. Значение по умолчанию 2e-4 м ^ 2.
Эффективная площадь базового поршня в порте Y. Значение параметров должно быть больше нуля. Значение по умолчанию 2e-4 м ^ 2.
Предварительное поджатие пружины в порту X. Значение по умолчанию 0.
Предварительное поджатие пружины в порту Y. Значение по умолчанию 0.
Максимальная сила пружины в полости X. Значение значения параметров должно быть больше, чем предварительное поджатие пружины. Значение по умолчанию 50 N.
Максимальная сила пружины ёмкости Y. Значение значения параметров должно быть больше, чем предварительное поджатие пружины. Значение по умолчанию 50 N.
Штрих поршня в ёмкости X. Значение параметров должно быть больше или равным нулю. Значение по умолчанию 5e-3 м.
Штрих поршня в ёмкости Y. Значение параметров должно быть больше или равным нулю. Значение по умолчанию 5e-3 м.
Задает ориентацию привода относительно глобально присвоенного положительного направления. Привод может быть установлен двумя различными способами, в зависимости от того, перемещает ли он поршень в положительном или отрицательном направлении, когда давление прикладывается к его входному отверстию. Если давление, приложенное к порту X, перемещает поршень в отрицательном направлении, установите параметр равным Acts in negative direction. Значение по умолчанию Acts in positive direction.
Блок имеет следующие порты:
XГидравлический порт сопоставлен с ёмкостью X клапана.
YГидравлический порт сопоставлен с ёмкостью Y клапана.
PПорт физического сигнала, который выводит перемещение поршня.
Следующий рисунок показывает типовой модуль управления насоса переменного объема, который обеспечивает измерение нагрузки и ограничение давления (см. [1]). В модуле измеряющий нагрузку компенсатор изменяет перемещение насоса, чтобы поддерживать заданный перепад давления на отверстии переменного сечения, в то время как ограничивающий давление компенсатор не позволяет давлению насоса превысить предел давления.
Пример Гидравлического Двигателя, Управляемого Насосом Переменной Измерения Нагрузки, реализует этот тип управления. Следующий рисунок показывает схему блока Control в модели примера.
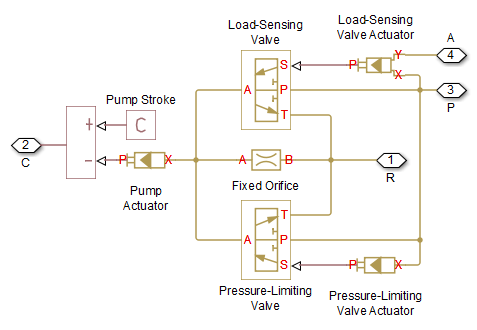
В модели есть три приводов гидравлического клапана:
Привод Клапана Ограничения Давления - Привод Одностороннего Действия, который управляет Клапаном Ограничения Давления.
Привод насоса - привод клапана одностороннего действия, который действует на устройство управления перемещением насоса (регулирование ярма).
Привод датчика нагрузки - привод клапана двойного действия, который управляет датчиком нагрузки. Его выход пропорционален различию между давлением насоса (порт P) и давлением нагрузки (порт А).
Откройте модель примера, чтобы увидеть настройки параметров для блоков.
[1] F. Yeapple, Руководство по проекту степени, Marcel Dekker, Inc., 1995
2-Position Valve Actuator | 3-Position Valve Actuator | Hydraulic Single-Acting Valve Actuator | Proportional and Servo-Valve Actuator
