Непрерывный драйвер клапана с выходом, пропорциональным входному сигналу
Приводы клапанов

Блок Proportional and Servo-Valve Actuator представляет собой электромагнитный привод, который используется в пропорциональных и сервоклапанах для привода золотника или другого рабочего представителя. Блок предназначен для работы с одной из моделей направленного клапана, чтобы сформировать желательное строение пропорционального или сервоклапана. Блок реализован как модель , основанная на таблице данных и воспроизводит только отношение вход/выход или переходный процесс привода, как представлено в каталоге или табличном данных.
Блок Proportional and Servo-Valve Actuator построен с использованием блоков из библиотеки Simscape™ Physical Signals. И вход, и выход блока являются физическими сигналами. Блок схема модели показан на следующем рисунке.
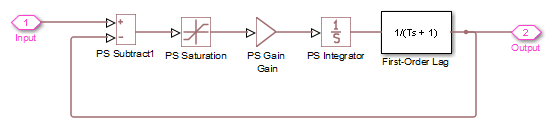
Модель привода построена из Библиотеки фундаментов Физических сигналов блоками: PS Subtract, PS Saturation, PS Gain, PS Integrator. Задержка первого порядка организована как подсистема, как показано ниже,
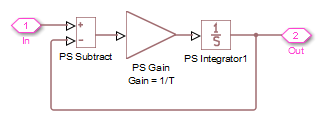
и также построен из блоков Физических Сигналов: PS Subtract, PS Gain и PS Integrator. Передаточная функция задержки
где T - Time constant задержки. Значение этого параметра устанавливается через Gain параметров блока PS Gain в подсистеме First-Order Lag путем установки его равным 1/ T.
Типичные переходные процессы сервоклапана или высококачественного пропорционального клапана показаны на следующем рисунке. Единственное различие между двумя откликами на рисунке является значением насыщения.
Можно настроить параметры блоков, такие как насыщение, усиление и постоянная времени, чтобы сделать переходные процессы достаточно близкими к тем, которые предусмотрены в таблице данных. Самый эффективный способ настроить параметры - использовать программное обеспечение Simulink Design Optimization.
Примечание
Этот блок построен из блоков из библиотеки Simscape Physical Signals (таких как PS Add, PS Gain и так далее). В настоящее время блоки в библиотеке физических сигналов не поддерживают распространение и проверку модулей. Для получения дополнительной информации см. раздел «Как работать с физическими единицами измерения».
Усиление блока PS Gain в верхнем уровне блок-схемы модели привода. Значение по умолчанию 377.
Временная константа задержки первого порядка. Параметр Gain блока PS Gain в подсистеме First-Order Lag равен 1/ Time constant. Значение по умолчанию 0.002 с.
Уровень насыщения блока PS Saturation в модели привода. Значение по умолчанию 0.3.
Блок имеет один входной порт физического сигнала и один выходной порт физического сигнала.
Пример привода с обратной связью с компенсированным давлением переменного объема насоса иллюстрирует использование блока Proportional and Servo-Valve Actuator в гидравлических системах.
2-Position Valve Actuator | 3-Position Valve Actuator | Hydraulic Double-Acting Valve Actuator | Hydraulic Single-Acting Valve Actuator
