Основные функциональные возможности гидроцилиндра одностороннего действия
Гидравлические Цилиндры
Блок Single-Acting Hydraulic Cylinder (Simple) представляет собой упрощенную версию гидравлического цилиндра, разработанную для приложений, где должна быть воспроизведена только основная функциональность цилиндра, в обмен на лучшую вычислительную эффективность. По этим причинам такие факторы, как сжимаемость жидкости, трение и утечки, приняты незначительными. Жёсткие упоры приняты неупругими, чтобы исключить любые возможные колебания в конце штриха. Модель особенно подходит для симуляции в реальном времени и HIL (оборудование в цикле), если такие упрощения приемлемы.
Модель описывается следующими уравнениями:
где
| F | Сила, развиваемая цилиндром |
| v | Скорость штока гидроцилиндра |
| vR, vC | Абсолютные скорости штока гидроцилиндра и корпуса цилиндра, соответственно |
| A | Площадь базового поршня |
| p | Давление на входном отверстии гидроцилиндра |
| q | Скорость потока жидкости на входе в гидроцилиндр |
| x | Положение поршня |
| x0 | Начальное расстояние между поршнем и прописной буквой |
| Fc | Жёсткий упор |
| xE | Расстояние, на которое поршень может перемещаться, чтобы полностью выйти из начального положения |
| xR | Расстояние, на которое поршень может перемещаться, чтобы полностью убрать из начального положения |
| Kp | Коэффициент проникновения |
| S | Поршневые штрихи |
Основным различием этого блока от блока Single-Acting Hydraulic Cylinder является представление жёсткого упора:
Блок Single-Acting Hydraulic Cylinder использует упругую модель упора, которая по существу является комбинацией пружины и демпфера, соединенных параллельно. Жесткость пружины, представляющей упругость контакта сталкивающихся тел, очень высока, что приводит к высокочастотным, малозначным колебаниям в момент столкновения тел. Эти колебания вряд ли можно заметить экспериментально, но их трудно обработать численной симуляцией и в целом уменьшить вычислительную эффективность.
Жёсткий упор в блоке Single-Acting Hydraulic Cylinder (Simple) представлен неупругой моделью, которая по существу является вязким демпфером с коэффициентом демпфирования, зависящим от проникновения. Этот коэффициент упоминается как коэффициент проникновения. При неупругой модели во время влияния не генерируется никаких колебаний, что приводит к повышению численной устойчивости и эффективности. Но модель неупругого упора имеет функцию, который вы должны учитывать при выборе модели: сталкивающиеся тела продолжают медленно двигаться друг в друга, пока контакт загружен силой сжатия. В реальной жизни это явление подобно столкновению двух тел, разделённых большим слоем вязкой жидкости. Требуется некоторое время, чтобы сжать жидкость, прежде чем тела сами вступят в контакт.
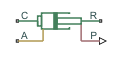
Связи R и C портов механической передачи соответствуют штоку гидроцилиндра и зажима корпусу гидроцилиндра, соответственно. Связь A является гидравлическим портом, сопоставленным с входным отверстием гидроцилиндра. Выходной порт физического сигнала P показывает удлинение штока тока.
Давление в порте А генерирует силу в направлении, заданном параметром Cylinder orientation.
Трение между движущимися частями не учитывается.
Эффекты инерции не учитываются.
Сжимаемость жидкости не учитывается.
Утечки приняты незначительными.
Жёсткие упоры приняты неупругими, как объяснено выше.
Эффективная площадь базового поршня. Значение по умолчанию 5e-4 м ^ 2.
Максимальное перемещение поршня между прописными буквами. Значение по умолчанию 0.1 м.
Расстояние между поршнем и прописной буквой в начале симуляции. Это значение не может превышать штрих поршня. Значение по умолчанию 0, что соответствует полностью убранному положению.
Задает свойство проникновения сталкивающихся тел. Чем выше значение коэффициента, тем меньше тела проникают друг в друга, но чем резче увеличение силы влияния. Чтобы узнать значение коэффициента для конкретного приложения, рекомендуется запустить одну и ту же модель с различными моделями жёсткого упора (или с различными моделями гидроцилиндра), пока они не покажут результаты закрытия. Значение по умолчанию коэффициента 1e12 Н/м/( м/с).
Задает ориентацию гидроцилиндра относительно глобально присвоенного положительного направления. Цилиндр может быть установлен двумя различными способами, в зависимости от того, прикладывает ли он силу в положительном или отрицательном направлении, когда давление прикладывается к его входному отверстию. Если давление, приложенное к порту А, оказывает силу в отрицательном направлении, установите параметр равным Acts in negative direction. Значение по умолчанию Acts in positive direction.
Блок имеет следующие порты:
AГидравлический порт сопоставлен с входным отверстием гидроцилиндра.
RПорт механической передачи, сопоставленная со штоком гидроцилиндра.
CПорт механической передачи, связанная с корпусом зажима цилиндра.
PВыходной порт физического сигнала, который выводит удлинитель штока.
Double-Acting Hydraulic Cylinder | Double-Acting Hydraulic Cylinder (Simple) | Single-Acting Hydraulic Cylinder | Translational Hard Stop | Translational Hydro-Mechanical Converter
