Гидравлический привод, действующий в одном направлении
Гидравлические Цилиндры
Блок Single-Acting Hydraulic Cylinder моделирует устройство, которое преобразует энергию жидкости в механическую энергию движения перемещения. Гидравлическая жидкость, перекачиваемая под давлением в полость цилиндра, заставляет поршень перемещаться и прикладывать силу к штоку гидроцилиндра. Цилиндры одностороннего действия передают силу и движение только в одном направлении. Используйте внешнее устройство, такое как пружина, вес или другой противоположный установленный цилиндр, для перемещения штока в противоположном направлении.
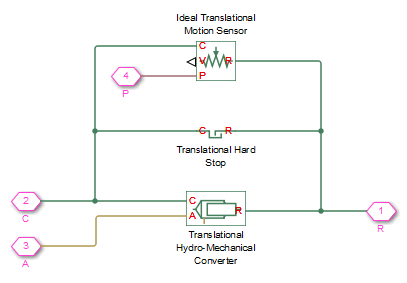
Порты R и C портов механической передачи соответствуют штоку гидроцилиндра и корпусу зажима гидроцилиндра, соответственно. Порт A является гидравлическим портом, сопоставленным с входным отверстием гидроцилиндра.
Энергия через порт A направлена к блоку Translational Hydro-Mechanical Converter. Преобразователь преобразует энергию жидкости в механическую и учитывает сжимаемость жидкости в полости цилиндра. Движение штока ограничено блоком механического Translational Hard Stop таким образом, что шток может перемещаться только между упорами гидроцилиндра. Положение поршня передается к порту p физического сигнала.
Перемещение поршня измеряется как положение на порте R относительно порта C. Этот Cylinder orientation определяет направление перемещения поршня. Перемещение поршня нейтральный, или 0, когда объем ёмкости равен мертвому объему ёмкости. Когда перемещение принято как вход, убедитесь, что производная положения равна скорости поршня. Это автоматически происходит, когда вход получен от соединения блока Translational Multibody Interface с соединением Simscape Multibody.
Когда перемещение устанавливается цилиндром, это вычисляется как:
| x pst = x 0 + x p | (1) |
где
| x pst | Перемещение штока, выдаваемое портом физического сигнала |
| <reservedrangesplaceholder0> 0 | Начальное расстояние между поршнем и прописной буквой |
| x p | Перемещение штока относительно его начального положения |
Модель цилиндра построена из библиотечных блоков Simscape™ Foundation. Принципиальная схема модели представлена ниже.
Утечки, внутренние или внешние, не учитываются.
Никакие загрузки на штоке поршня, такие как инерция, трение, пружина и так далее, не учитываются. При необходимости можно легко добавить их, подключив соответствующий базовый блок к порту гидроцилиндра R.
Эффективная площадь базового поршня. Значение по умолчанию 0.001 м ^ 2.
Максимальное перемещение поршня между прописными буквами. Значение по умолчанию 0.1 м.
Метод определения положения поршня. Значение по умолчанию Calculate from velocity of port R relative to port C, который вычисляет положение внутри и сообщает положение в порту p. Блок также может получить положение в порте p от блока Multibody, когда установлено на Provide input signal from Multibody joint.
Расстояние между поршнем и прописной буквой в начале симуляции. Это значение не может превышать штрих поршня. Значение по умолчанию 0, что соответствует полностью убранному положению. Чтобы включить этот параметр, установите Piston displacement равным Calculate from velocity of port R relative to port C.
Объем жидкости в полости после полного втягивания штока. Значение по умолчанию 1e-4 м ^ 3.
Давление в полости цилиндра в начале симуляции. Значение по умолчанию 0.
Коэффициент удельной теплоемкости для Блока Емкости Гидравлического Поршня. Значение по умолчанию 1.4.
Задает свойство упругости сталкивающихся тел для блока Translational Hard Stop. Чем больше значение параметра, тем меньше тела проникают друг в друга, тем более жестким становится влияние. Меньшее значение параметра делает контакт более мягким, но в целом улучшает сходимость и вычислительную эффективность. Значение по умолчанию 1e6 Н/м.
Задает свойство демпфирования сталкивающихся тел для блока Translational Hard Stop. При нулевом демпфировании влияние близко к абсолютно упругому. Чем больше значение параметра, тем больше энергии рассеивается во время взаимодействия. Следует иметь в виду, что демпфирование влияет на движение поршня, пока он находится в контакте с ограничителем, включая период, когда ползун выходит из контакта. По причинам вычислительной эффективности и сходимости MathWorks рекомендует присвоить ненулевое значение этому параметру. Значение по умолчанию является 150 Н * с/м.
Методы моделирования для жёстких упоров. Опции включают:
Stiffness and damping applied smoothly through transition region (по умолчанию) - Масштабируйте амплитуду контактной силы от нуля до ее полного значения на заданной длине перехода. Масштабирование носит полиномиальный характер. Функция масштабирования полинома численно сглажена и не производит нулевых пересечений любого вида.
Full stiffness and damping applied at bounds, undamped rebound - Приложите полное значение расчетной контактной силы при нарушении местоположения жёсткого упора. Сила контакта представляет собой смесь пружины и демпфирующих сил во время проникновения и упругой силы - без демпфирующей составляющей - во время отскока. Сглаживание не применяется.
Full stiffness and damping applied at bounds, damped rebound - Приложите полное значение расчетной контактной силы при нарушении местоположения жёсткого упора. Сила контакта представляет собой смесь пружины и демпфирующих сил во время как проникновения, так и отскока. Сглаживание не применяется. Это жёсткий упор, используемая в предыдущих релизах.
Расстояние, ниже которого масштабирование прикладывается к жёсткому упору. Сила контакта равна нулю, когда расстояние до жёсткого упора равно значению, заданному здесь. Это при полном значении, когда расстояние до жёсткого упора равняется нулю. Значение по умолчанию 1 mm..
Задает ориентацию гидроцилиндра относительно глобально присвоенного положительного направления. Цилиндр может быть установлен двумя различными способами, в зависимости от того, прикладывает ли он силу в положительном или отрицательном направлении, когда давление прикладывается к его входному отверстию. Если давление, приложенное к порту А, оказывает силу в отрицательном направлении, установите параметр равным Pressure at A causes negative displacement of R relative to C. Значение по умолчанию Pressure at A causes positive displacement of R relative to C.
Параметр, определяемый типом рабочей жидкости:
Fluid bulk modulus
Используйте блок Hydraulic Fluid или блок Custom Hydraulic Fluid, чтобы задать свойства жидкости.
Блок имеет следующие порты:
AГидравлический порт сопоставлен с входным отверстием гидроцилиндра.
RПорт механической передачи, сопоставленная со штоком гидроцилиндра.
CПорт механической передачи, связанная с корпусом зажима цилиндра.
pВходной порт физического сигнала, который принимает удлинение штока от блока Multibody. Чтобы открыть этот порт, установите Piston displacement равным Provide input signal from Multibody joint.
pВыходной порт физического сигнала, который возвращает положение штока относительно порта C. Чтобы открыть этот порт, установите Piston displacement равным Calculate from velocity of port R relative to port C.
Double-Acting Hydraulic Cylinder | Ideal Translational Motion Sensor | Single-Acting Hydraulic Cylinder (Simple) | Translational Hard Stop | Translational Hydro-Mechanical Converter
