Планетарная передача, train со ступенчатой планетной передачей
Simscape/Трансмиссия/Передачи

Блок Compound Planetary Gear представляет собой планетарную передачу, train с составными планетарными шестернями. Каждая составная планетарная передача представляет собой пару жестко соединенных и продольно расположенных передач разных радиусов. Одна из двух передач входит в зацепление с расположенной в центре солнечной шестерней, а другая - в зацепление с внешней кольцевой шестерней.
Составная планетарная передача
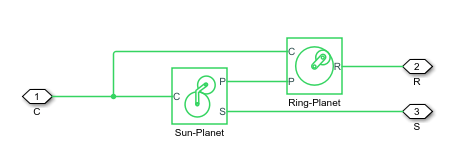
Блок моделирует составную планетарную передачу как структурный компонент, основанный на Simscape™ Driveline™ Sun-Planet и Ring-Planet блоках. Рисунок демонстрирует эквивалентную блок-схему для блока Compound planetary gear.
Чтобы увеличить точность модели передачи, задайте такие свойства, как инерция передачи, потери сетки и вязкие потери. По умолчанию инерция передачи и вязкие потери приняты незначительными. Блок позволяет вам задать инерцию внутренних планетных передач. Чтобы смоделировать инерцию несущей, солнечной и кольцевой передач, соедините блоки Simscape Inertia с портами C, S и R.
Можно смоделировать эффекты теплового потока и изменения температуры, включив дополнительный тепловой порт. Чтобы включить порт, установите Friction model равным Temperature-dependent efficiency.
Блок Compound Planetary Gear накладывает два кинематических и два геометрических ограничения.
где:
rC - радиус несущей передачи.
ωC - скорость вращения несущей передачи.
rS - радиус солнечной передачи.
ωS - скорость вращения солнечной передачи.
rP1 - радиус планетарной передачи 1.
ωP - скорость вращения планетных передач.
rP2 - радиус планетарной передачи 2.
rR - радиус кольцевой передачи.
Передаточные отношения кольцевая планета и планета-солнце:
и
где:
gRP - передаточное отношение «кольцо-планета».
NR - количество зубьев на кольцевой шестерне.
NP2 - количество зубьев на планетарной передаче 2.
gPS - передаточное отношение «планета-солнце».
NP1 - количество зубьев на планетарной передаче 1.
NS - количество зубьев на солнечной передаче.
С точки зрения передаточных чисел ключевым кинематическим ограничением является:
Четыре степени свободы сводятся к двум независимым степеням свободы. Зубчатые пары (1, 2) = (P2, R) и (S, P1).
Предупреждение
Передаточное gRP должно быть строго больше единицы.
Передатчики крутящего момента:
и
где:
τP2 - передача крутящего момента для планетарной передачи 2.
τR - передача крутящего момента для кольцевой передачи.
τloss - потери передачи крутящего момента.
τS - передача крутящего момента для солнечной передачи.
τP1 - передача крутящего момента для планетарной передачи 1.
В идеальном случае, когда нет потерь крутящего момента, τloss = 0.
В неидеальном случае τloss ≠ 0. Для получения дополнительной информации см. «Моделирование передач с потерями».
Инерция передачи принята незначительной.
Передачи обрабатываются как жесткие компоненты.
Трение Кулона замедляет симуляцию. Для получения дополнительной информации см. «Настройка точности модели».
