Планетарная передача с двумя солнечными шестернями и двумя планетарными аппаратами
Simscape/Трансмиссия/Передачи

Блок Ravigneaux Gear представляет планетарную передачу с train двойного солнца и планеты. Две солнечные передачи расположены по центру и разделены в продольном направлении вдоль общей оси вращения. Меньшая из этих передач входит в зацепление с внутренней планетной шестерней, которая, в свою очередь, входит в зацепление с внешней планетной шестерней. Внешняя планетарная шестерня, длина которой охватывает расстояние между двумя солнечными шестернями, входит в зацепление как с большой солнечной шестерней, так и с кольцевой шестерней.
Носитель удерживает планетарные зубчатые пары на месте в разных радиусах. Держатель, который жестко соединяется с валом, может вращаться как модуль относительно солнечной и кольцевой передач. Шарниры вращения, каждый из которых расположен между планетной передачей и держателем, позволяют шестерням вращаться вокруг своих отдельных продольных осей.
Относительные скорости вращения солнца, планеты и кольцевых передач следуют из кинематических ограничений между ними. Для получения дополнительной информации см. «Уравнения».
Блок моделирует механизм Ravigneaux как структурный компонент на основе Sun-Planet, Planet-Planet, и Ring-Planet блоки Simscape™ Driveline™. Рисунок показывает эквивалентный блок этого структурного компонента.
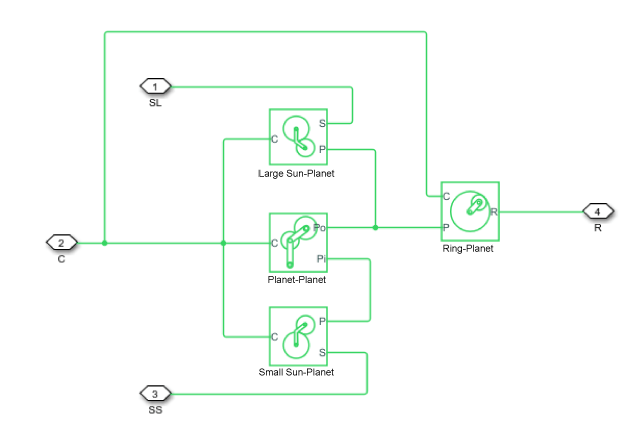
Чтобы увеличить точность модели передачи, можно задать такие свойства, как инерция передачи, потери сетки и вязкие потери. По умолчанию инерция передачи и вязкие потери приняты незначительными. Блок позволяет вам задать инерцию внутренних планетных передач. Чтобы смоделировать инерцию перевозчика, большого солнца, небольшое солнце и механизмы звонка, соединяют блоки Simscape <reservedrangesplaceholder4> с портами C, SL, SS, и R.
Можно смоделировать эффекты теплового потока и изменения температуры, включив дополнительный тепловой порт. Чтобы включить порт, установите Friction model равным Temperature-dependent efficiency.
Блок Ravigneaux Gear накладывает четыре кинематических и четыре геометрических ограничения на четыре соединенные оси и два внутренних колеса (внутреннюю и внешнюю планетарные передачи):
где:
rCi - радиус внутренней несущей передачи.
ωC - скорость вращения несущих передач.
rSS - радиус малой солнечной передачи.
ωSS - скорость вращения малой солнечной передачи.
rPi - радиус внутренней планетной передачи.
ωPi - скорость вращения внутренней планетной передачи.
rCo - радиус внешней несущей передачи.
rSL - радиус большой солнечной передачи.
ωSL - скорость вращения большой солнечной передачи.
rPo - радиус внешней планетной передачи.
ωPo - скорость вращения внешней планетной передачи.
ωR - скорость вращения кольцевой передачи.
Отношения кольцо-солнце:
где:
gRSS - соотношение колец к малым солнечным передачам.
NR - количество зубьев в кольцевой шестерне.
NSS - количество зубьев в малой солнечной шестерне.
gRSS - передаточное отношение «кольцо к большому солнцу».
NSL - количество зубьев в большой солнечной передаче.
С точки зрения этих передаточных чисел основными кинематическими ограничениями являются:
Шесть степеней свободы сводятся к двум независимым степеням свободы. Зубчатые пары: (1,2) = (LS, P), (SS, P), (P, R) и (P, P).
Предупреждение
Передаточное gRSS должно быть строго больше, чем передаточное gRSL. Передаточное gRSL должно быть строго больше единицы.
Передатчики крутящего момента:
где:
τSS - передача крутящего момента для малой солнечной передачи.
τR - передача крутящего момента для кольцевой передачи.
τloss(SS,R) - потери передачи крутящего момента между малой солнечной передачей и кольцевой передачей.
τSL - передача крутящего момента для большой солнечной передачи.
τloss(SL,R) - потери передачи крутящего момента между большой солнечной шестерней и кольцевой шестерней.
В идеальном случае, когда нет потерь крутящего момента, τloss = 0.
В неидеальном случае τloss ≠ 0. Для получения дополнительной информации см. «Моделирование передач с потерями».
Передачи приняты жесткими.
Трение Кулона замедляет симуляцию. Для получения дополнительной информации см. «Настройка точности модели».
