В этом примере показано, как можно записать и построить данные моделирования вместо добавления датчиков к модели.
Показанная модель представляет двигатель постоянного тока с постоянными магнитами.
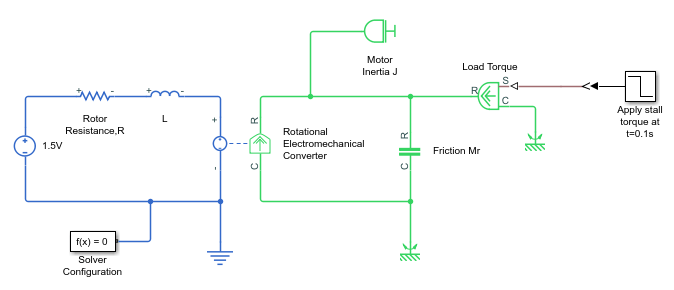
Эта модель очень похожа на пример с двигателем постоянного тока с постоянными магнитами, но, в отличие от модели с примерами, она не включает модуль Sensing w (Ideal Rotational Motion Sensor и PS-Simulink Converter блок) вместе с возможностями вращения двигателя. Для получения подробного описания примера двигателя постоянного тока с постоянными магнитами смотрите Оценку эффективности двигателя постоянного тока.
Создайте модель, как показано на предыдущем рисунке.
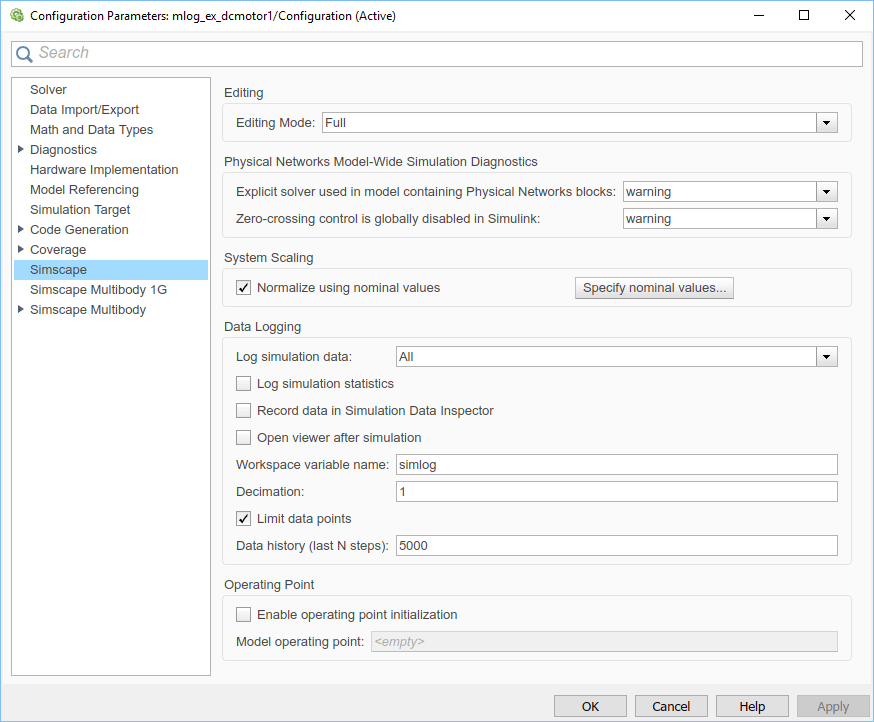
В окне модели откройте вкладку Modeling и нажмите Model Settings. Откроется диалоговое окно Параметры конфигурации (Configuration Parameters).
В диалоговом окне Параметры конфигурации на левой панели выберите Data Import/Export. Снимите флажок Single simulation output, который установлен по умолчанию. Этот шаг позволяет связать записанные данные моделирования с отдельной переменной рабочей области, вместо того, чтобы быть частью одного выходного объекта.
Чтобы включить логгирование данных, в диалоговом окне Параметров конфигурации, в левой панели, выберите Simscape, затем установите параметр Log simulation data на All и нажмите OK.
Симулируйте модель. Это создает переменную рабочей области с именем simlog (как задано параметром Workspace variable name), который содержит данные моделирования.
The simlog переменная имеет ту же иерархию, что и модель. Чтобы увидеть всю структуру переменной, в командной строке введите:
print(simlog)
Эта команда печатает целое дерево данных.
mlog_ex_dcmotor1
+-Electrical_Reference2
| +-V
| +-v
+-Friction_Mr
| +-C
| | +-w
| +-R
| | +-w
| +-t
| +-w
+-L
| +-i
| +-i_L
| +-n
| | +-v
| +-p
| | +-v
| +-v
+-Load_Torque
| +-C
| | +-w
| +-R
| | +-w
| +-S
| +-t
| +-w
+-Mechanical_Rotational_Reference
| +-W
| +-w
+-Mechanical_Rotational_Reference1
| +-W
| +-w
+-Motor_Inertia_J
| +-I
| | +-w
| +-t
| +-w
+-Rotational_Electromechanical_Converter
| +-C
| | +-w
| +-R
| | +-w
| +-i
| +-n
| | +-v
| +-p
| | +-v
| +-t
| +-v
| +-w
+-Rotor_ResistanceR
| +-i
| +-n
| | +-v
| +-p
| | +-v
| +-v
+-x1_5V
+-i
+-n
| +-v
+-p
| +-v
+-vКаждый узел, который представляет Across, Through или внутреннюю основную переменную, содержит последовательные данные. Чтобы попасть в серию, необходимо задать полный путь к ней через дерево, начиная с имени переменной верхнего уровня. Для примера, чтобы получить указатель на серию, представляющую скорости вращения двигателя, введите:
s1 = simlog.Rotational_Electromechanical_Converter.R.w.series;
Отсюда можно получить доступ к значениям и временным векторам для ряда и проанализировать их.
Вы не должны изолировать данные ряда, чтобы построить график его значений относительно времени или против другого ряда. Для примера, чтобы увидеть, как скорость двигателя (в оборотах в минуту) изменяется со временем, введите:
plot(simlog.Rotational_Electromechanical_Converter.R.w,'units','rpm')
Сравните этот рисунок с отображением возможностей в примере двигателя постоянного тока с постоянными магнитами. Результаты в точности совпадают.
Чтобы построить крутящий момент двигателя относительно его скорости вращения, в rpm, и добавить описательные имена осей, введите:
plotxy(simlog.Rotational_Electromechanical_Converter.R.w,simlog.Motor_Inertia_J.t,... 'xunit','rpm','xname','Angular velocity','yname','Torque')
Для получения дополнительной информации о графическом изображении записанных данных моделирования, смотрите simscape.logging.plot и simscape.logging.plotxy страницы с описанием.
