Геометрия облака точек для контактного моделирования
Simscape/Multibody/Кривые и поверхности

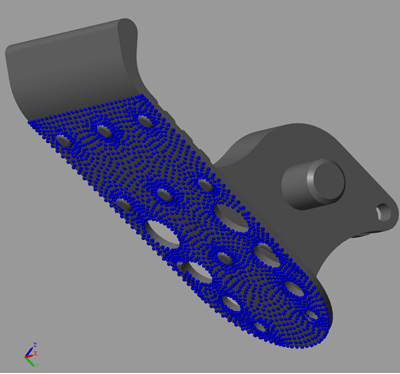
Блок Point Cloud экспортирует набор точек в пространстве для моделирования контактных задач. Каждая точка имеет жесткое смещение относительно исходной системы координат блока Point Cloud. Можно использовать блок Point Cloud для аппроксимации геометрии, такой как твердое тело или выпуклая оболочка. При моделировании устойчивых и распределенных проблем контакта блок Spacial Contact Force работает лучше с блоком Point Cloud, чем с блоками геометрии, такими как Brick Solid и File Solid. Это изображение демонстрирует, как использовать облако точек для аппроксимации дна ноги робота.
Блок Point Cloud имеет один порт опорной системы координат (R) и один порт геометрии (G). Чтобы использовать блок Point Cloud для моделирования контактных проблем, соедините G порта с блоком Spatial Contact Force. Блок Spatial Contact Force рассматривает облако точек как совокупность геометрий N-точек и применяет силы контакта к каждой точке независимо. Каждая сила контакта основана на проникновении и скорости отдельной точки облака. Обратите внимание, что блок Spatial Contact Force не поддерживает измерение при соединении с блоком Point Cloud.
Чтобы задать местоположения точек, можно ввести матрицу N -by-3 для параметра Coordinates Matrix блока Point Cloud. Каждая строка матрицы задает Декартовы координаты точки относительно системы координат Point Cloud блока. Ошибка возникает, если в матрице есть повторяющиеся строки.
Совет
Вы можете использовать unique функция для удаления повторяющихся строк из матрицы входа.
