Применить силы контакта между парой связанных тел
Simscape/Multibody/Силы и крутящие моменты

Блок Spatial Contact Force моделирует контакт между парой тел с помощью метода штрафа. Этот метод позволяет телам проникать небольшую величину для вычисления сил контакта. Блок применяет нормальные и фрикционные силы контакта между соединённой основой и последующими телами.
Нормальная сила контакта вычисляется с помощью уравнения силы классической системы пружина-демпфер. Во время контакта нормальная сила контакта пропорциональна ее соответствующей глубине и скорости проникновения. Этот Transition Region Width задает переходную область к уравнениям силы. В то время как глубина проникновения перемещается через переходную область, блок плавно растёт вверх по силе. В конце переходной области прикладываются полная жесткость и демпфирование. На отскоке и жесткость, и силы демпфирования плавно уменьшаются назад к нулю. Этот плавный переход устраняет разрывы из уравнений силы и устраняет события пересечения нулем. Чем больше Transition Region Width, тем плавнее тренд перехода силы контакта. Напротив, когда Transition Region Width уменьшается до нуля, сила контакта имеет тенденцию иметь более резкий переход, который ведет себя как прерывистая задача.
Чтобы лучше обнаружить контакты, когда значение Transition Region Width мало, блок Spatial Contact Force поддерживает опциональное обнаружение пересечения нулем. События пересечения нулем происходят только, когда расстояние разделения изменяется с положительного или нулевого на отрицательное и наоборот.
Примечание
Обнаружение пересечения нулем блока Spatial Contact Force отличается при исходном пересечении нулем обнаружении Simulink® блоки, такие как From File и Integrator, потому что уравнение силы Spatial Contact Force непрерывно. Для получения дополнительной информации об обнаружении пересечения нулем блоков Simulink, см. «Обнаружение пересечения нулем».
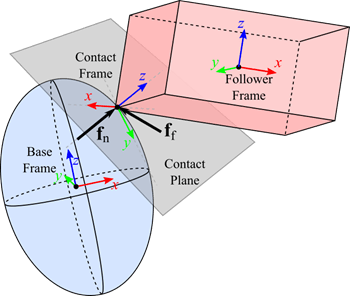
Каждое тело имеет контактную систему координат, источник которой расположен в точке контакта, и ось Z, совмещенная с нормальным направлением контакта. Когда поверхность гладкая около точки контакта, контакт нормален является наружной поверхностью нормальна в точке контакта. Когда поверхность не гладкая, нормаль контакта вычисляется другими средствами, но она всегда указывает наружу от тела около точки контакта. Во время непрерывного контакта контактная система координат перемещается вокруг тела, когда контактная точка перемещается.
Схема показывает контактную систему координат для основного тела. Силы контакта прикладываются к двум твердым телам в начале контактной системы координат в соответствии с Третьим законом Ньютона:
Нормальная сила, fn, которая выровнена по оси Z контактной системы координат. Эта сила раздвигает твердые тела порядка чтобы уменьшить проникновение.
Сила трения, ff, который лежит в плоскости контакта. Эта сила противостоит относительным тангенциальным скоростям между двумя телами вблизи области проникновения.
Блок Spatial Contact Force поддерживает различные геометрии и тела. Для примера он поддерживает все твердые блоки в библиотеке Body Элементы и блоки Infinite Plane и Point в библиотеке Curves и Surfaces.
Примечание
Для блоков File Solid и Revolved Solid их физические свойства, такие как масса и инерция, основаны на истинной геометрии, но контактное моделирование основано на выпуклой оболочке геометрии. Для получения примера см. следующий рисунок.
Контакты между твердыми телами
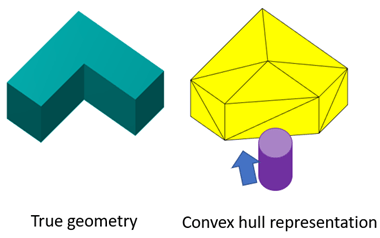
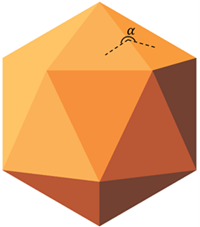
Выпуклые оболочки обычно используются, чтобы представлять геометрический контур, когда истинная геометрия представляет алгоритмическую сложность. A выпуклой оболочки является наименьшим выпуклым многогранником, который содержит все вершины истинной геометрии. Для выпуклой оболочки наружный угол (α) между парой смежных граней должен быть больше или равен 180 степеням.
Выпуклая оболочка
Stiffness - Сопротивление контактной пружины геометрическому проникновению1e6 N/m (по умолчанию)Жесткость пружины является постоянным значением, которое представляет силу контакта двух сталкивающихся твердых тел. Чем больше значение жесткости пружины, тем больше контакт между твердыми элементами тела.
Damping - Сопротивление контактного демпфера движению во время проникновения геометрии1e3 N/(m/s) (по умолчанию)Коэффициент демпфирования является постоянным значением, которое представляет потерянную энергию от столкновения твердых тел. Чем больше значение коэффициента демпфирования, тем больше энергии теряется при столкновении геометрии и тем быстрее демпфируются контактные вибрации. Значение нуля может использоваться, чтобы смоделировать идеально упругие столкновения, которые экономят энергию.
Transition Region Width - Область, над которой усилие пружины-демпфера поднимается до своего полного значения1e-4 m (по умолчанию)Ширина переходной области, выраженная в глубине проникновения. Чем меньше область, тем резче начало контакта и тем меньше временной шаг, требуемый для решателя. Уменьшение переходной области улучшает точность модели, в то же время расширяя ее, улучшает скорость симуляции.
Method - Закон о фрикционной силеSmooth Stick-Slip (по умолчанию) | NoneСила трения - это сила, которая лежит тангенциально в контактной системе координат и перпендикулярно нормальной силе. Выбор Smooth Stick-Slip обеспечивает более реалистичную динамику контактов.
Smooth Stick-SlipКогда Smooth Stick-Slip выбирается, что сила трения непрерывна относительно относительной тангенциальной скорости около области проникновения. Этот график показывает, как влияет сила трения:
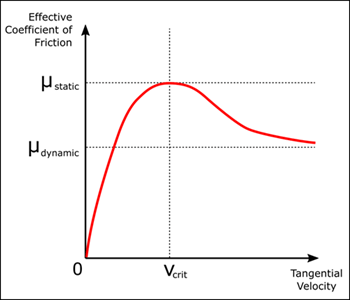
.rstatic - коэффициент статического трения, мкдинамический - коэффициент динамического трения, а vcrit - критическая скорость.
NoneКогда None выбран, фрикционная сила не приложена.
Coefficient of Static Friction - Отношение величины силы трения к величине нормальной силы0.5 (по умолчанию)Отношение величины силы трения к величине нормальной силы, когда тангенциальная скорость близка к нулю.
Это значение определяется свойствами материала контактирующих твердых тел. Он всегда неотрицателен и часто меньше единицы, хотя значения, большие единицы, возможны для материалов с высоким трением. В большинстве случаев это значение должно быть выше Coefficient of Dynamic Friction.
Чтобы включить этот параметр, установите Method равным Smooth Stick-Slip.
Coefficient of Dynamic Friction - Отношение величины силы трения к величине нормальной силы0.3 (по умолчанию)Отношение величины силы трения к величине нормальной силы, когда тангенциальная скорость большая.
Это значение определяется свойствами материала контактирующих твердых тел. Он всегда неотрицателен и часто меньше единицы, хотя значения, большие единицы, возможны для материалов с высоким трением. В большинстве случаев это значение должно быть ниже Coefficient of Static Friction.
Чтобы включить этот параметр, установите Method равным Smooth Stick-Slip.
Critical Velocity - Скорость, которая определяет смешение между статическим и динамическим коэффициентами трения1e-3 m/s (по умолчанию)Когда критическая скорость равна величине тангенциальной скорости, эффективный коэффициент трения равен заданному Coefficient of Static Friction. Когда величина тангенциальной скорости увеличивается сверх этого значения, эффективный коэффициент трения асимптотически приближается к заданному Coefficient of Dynamic Friction.
Чтобы включить этот параметр, установите Method равным Smooth Stick-Slip.
Separation Distance - Расстояние между двумя твердыми теламиcleared (по умолчанию) | провереноВыберите, чтобы измерить расстояние между двумя твердыми телами. Если два твердых тела не проникают, это неотрицательное значение, равное минимальному расстоянию между этими двумя геометриями. Если два твердых тела проникают, это отрицательное значение, равное глубине проникновения.
Normal Force - Величина нормальной контактной силы между двумя связанными твердыми теламиcleared (по умолчанию) | провереноВыберите, чтобы измерить амплитуду нормальной силы контакта между двумя связанными твердыми телами.
Frictional Force Magnitude - Величина силы трения между двумя связанными твердыми теламиcleared (по умолчанию) | провереноВыберите, чтобы измерить величину трения силы контакта между двумя связанными твердыми телами.
Detect Contact Start and End - Обнаружение начала и конца контактов как событий пересечения нулемcleared (по умолчанию) | провереноВыберите, чтобы обнаружить начало и конец каждого контакта как события пересечения нулем. События пересечения нулем происходят, когда расстояние разделения изменяется с положительного или нулевого на отрицательное и наоборот.
Brick Solid | Cylindrical Solid | Extruded Solid | Твердое тело файла | Spherical Solid





