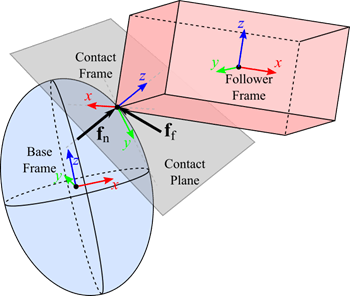
При моделировании твердых блоков, контактирующих друг с другом, силы контакта играют важную роль в том, как ведут себя твердые блоки. И нормальная сила, fn, и сила трения, ff, может привести к резкому изменению поведения модели. Силы контакта вступают в действие во многих различных ситуациях моделирования, таких как:
Упаковочные конвейеры
Роботизированное движение
Динамика гоночных автомобилей
Блок Spatial Contact Force моделирует силы между основой и последующей системой координат твердых тел. Когда два твердых блока соединены, Spatial Contact Force блок прикладывает равные и противоположные силы вдоль общей плоскости контакта. Эти силы соответствуют третьему закону Ньютона. Нормальная сила прикладывается на основе глубины проникновения и скорости проникновения. В случае применения сила трения определяется нормальной силой и относительными скоростями в точке контакта.
Simscape™ Multibody™ использует штрафной метод для моделирования контакта между телами, что позволяет телам проникать в небольшое количество. Силы контакта в нормальном направлении вычисляются с помощью закона силы пружины-демпфера: чем глубже проникновение и чем больше относительная скорость в направлении проникновения, тем больше нормальные силы контакта.
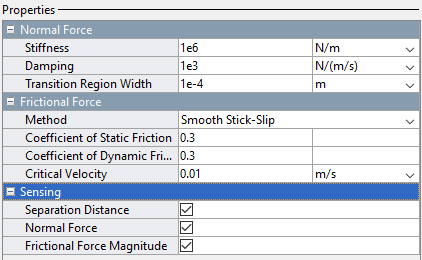
Свойства Spatial Contact Force блока разделены на три расширяемых узла: Normal Force, Frictional Force и Sensing. Установите эти свойства при использовании блока Spatial Contact Force, чтобы смоделировать силы контакта между двумя твердыми телами.
Для получения дополнительной информации об этих свойствах см. Spatial Contact Force.
Параметры в сечении Нормальная Сила используются, чтобы определить нормальную силу, fnчто два твердых тела оказывают друг на друга. Можно задать Stiffness, Damping и Transition Region Width.
Параметры в разделе Сила трения используются, чтобы определить силу трения, ffчто два твердых тела оказывают друг на друга. Если вы задаете Method Smooth Stick-Slipзатем можно задать Coefficient of Static Friction, Coefficient of Dynamic Friction и Critical Velocity. Эти опции недоступны, когда для Method задано значение None.
Помимо моделирования контакта между двумя твердыми блоками, можно также использовать Spatial Contact Force блок, чтобы понять:
Расстояние разделения - расстояние между двумя твердыми телами
Нормальная Сила - нормальная сила, действующая каждым твердым телом на другое.
Величина силы трения - сила трения, приложенная каждым твердым телом к другому.
Чтобы включить эти опции, откройте Spatial Contact Force свойства блока. В разделе Sensing выберите свойства, которые должен чувствовать блок. Для каждого свойства в блоке доступен порт. Соедините эти порты с средством просмотра по вашему выбору.
Блок Spatial Contact Force по своей сути не знает информацию о двух соединяющихся твердых телах. В твердых параметрах блоков включите параметр Export: Entire Geometry.
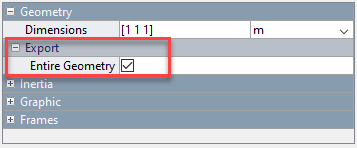
Если эта опция включена, на твердотельном блоке появится новый геометрический порт, G.

Соедините порт геометрии с основой или последующим портом на блоке Spatial Contact Force. Выполните те же шаги для вашего другого твердого блока и соедините его с оставшимся портом. Дополнительные сведения о базовых и последующих системах координат см. в разделе Выбор системы координат измерения.
По сравнению с моделированием механических отношений в системе мультител контакт моделирования представляет больше вариантов, и выбранные методы могут повлиять на скорость симуляции, точность и поддерживаемость модели. Simscape Multibody предоставляет основные конструкции контактного моделирования, но существует много способов их использования.
Вычисленные нормальные силы контакта являются непрерывными функциями глубины проникновения и скорости проникновения. Simscape Multibody вычисляет эти нормальные силы путем уменьшения сил пружины и демпфера, когда глубина меньше Transition Region Width. Увеличение Transition Region Width уменьшает резкость силы контакта, облегчая для решателя продвижение, но позволяя увеличить количество проникновения. Уменьшение Transition Region Width дает силам контакта более резкий профиль, ближе к идеализированному контакту твёрдого тела. Однако уменьшение Transition Region Width может также ухудшить эффективность решателя.
Установка максимального размера шага на 1e-3 секунды или ниже повышает точность во многих моделях. Уменьшение относительного допуска решателя может привести к аналогичному эффекту. Однако уменьшение размера шага также уменьшает скорость симуляции.
Явные решатели, такие как ode45, обычно лучше для систем со многими быстрыми конфликтами или изменениями контактов. Неявные решатели могут бороться при таких обстоятельствах. Если изменения контакта являются нечастыми и более стабильными, неявные решатели могут предложить преимущество в скорости из-за их способности обрабатывать жесткость, введенную силами контакта.
Расстояние разделения между двумя твердыми блоками положительное, когда две геометрии не находятся в контакте, нуль, когда они касаются, и отрицательное, когда существует нетривиальное проникновение между геометриями. Когда расстояние разделения отрицательное, его величина также известна как глубина проникновения. Глубина проникновения является непрерывной функцией положений и ориентаций геометрий.
Simscape Multibody использует алгоритмы геометрического анализа, которые настраиваются для небольших приложений контактного моделирования. Некоторые алгоритмы предполагают, что глубина проникновения мала по сравнению с размером геометрий. Если это не так, вычисленные (отрицательные) расстояния разделения могут быть только аппроксимированными или могут проявлять разрывы, и получаемые силы контакта могут быть неустойчивыми. Для наилучших результатов ограничьте глубину проникновения в модели.
Brick Solid | Cylindrical Solid | Spatial Contact Force | Spherical Solid
