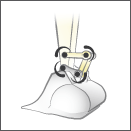
Идентифицируйте соединения и ограничения между различными телами. Соединения могут быть реальными, такими как соединения между поршнем и его корпусом или виртуальными, такими как соединения между двумя планетами.
Моделируйте степени свободы между телами, соединяя их системы координат через соединения. Можно дополнительно ограничить эти степени свободы с помощью специальных ограничений, таких как ограничения между шестернями. Пример см. в разделе Сборка модели шестерни.
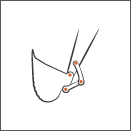
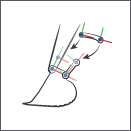
Задайте состояния целевых элементов различных соединений. Можно задать требуемое положение и скорость соединения в начальный момент времени. Если целевые значения состояний действительны и совместимы, соединения собираются в заданных состояниях. См. пример в разделах Guide Assembly и Visualize Model в Модели Кинематической Цепи Замкнутой Системы.
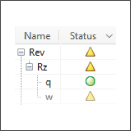
Обновите блок. Исследуйте визуализацию модели для проблем сборки. Откройте Simscape™ Средство Просмотра или Simscape Multibody™ Model Report, чтобы увидеть, все ли цели состояния были удовлетворены. Смотрите раздел Сборки блока проверки модели кинематической цепи с обратной связью для примера.
