Следующие примеры показывают, как расположить и сориентировать зубчатые тела так, чтобы они удовлетворяли требованиям сборки различных блоков ограничений зубчатых колес. Каждый пример начинается с обзора соответствующих размерностей передачи и расположения систем координат. Эти атрибуты управляют выбором твердых преобразований, необходимых для обеспечения того, чтобы передачи собирались в mesh.
Модели имеют одну и ту же топологию блоков, при этом компоненты модели - тела, соединения и ограничение передачи - в каждом случае расположены в кинематической замкнутой цепи. Рисунок показывает простой цикл. Несущее тело находится в примерах, которые считаются прикрепленными к лабораторной системе координат, инерция которого, следовательно, сводится к излишней детали, и тело полностью игнорируется.
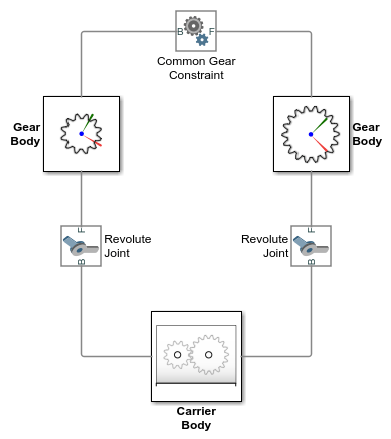
Модели содержат четыре типа блоков Simscape™ Multibody™:
File Solid - задает геометрию передачи, инерцию и цвета. Геометрия передачи, в комплекте с зубьями или резьбой, чтобы более четко показать передачи в mesh, импортируются из файлов STEP. Положения опорных систем координат зубчатых колес относительно геометрии зубчатых колес получаются из тех же файлов.
Соединение - Обеспечивает зубчатым телам необходимые степени свободы. Revolute Joint блоки позволяют вращать вокруг одной оси. Prismatic Joint блоки обеспечивают перемещение вдоль одной оси. Заданные в блоках соединений цели в состоянии скорости приводят передачи в движение.
Rigid Transform - Вращает и перемещает соединения и прикрепленные зубчатые тела так, чтобы они были правильно помещены для зацепления. Rigid Transform блоки обеспечивают средства для изменения расположения зубчатых колес и, следовательно, для удовлетворения требований к узлу зубчатых колес.
Ограничение передачи - соединяет движения зубчатых тел. Блоки ограничения передачи устраняют одну степень свободы между шестернями, заставляя их перемещаться как в mesh. Примеры показывают один за другим различные блоки ограничений передачи.
The smdoc_bevel_gear_start модель, показанная на рисунке, предоставляет пример узла конического зубчатого колеса. Модель, основанная на Bevel Gear Constraint блоке, завершена во всех смыслах, кроме единицы - все твердые преобразования равны нулю, и системы координат передач, следовательно, совпадают в пространстве.
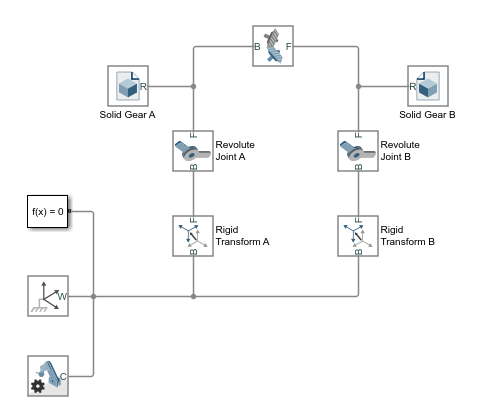
В этом кратком руководстве показано, как подходящие преобразования легко следуют из размерностей передачи и ограничений сборки - и как, после того как они заданы в Rigid Transform блоках, они позволяют модели передачи собираться как в mesh без ошибок.
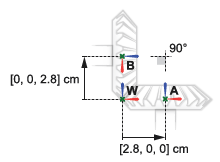
Конические передачи A и B идентичны по размеру с радиусом тангажа 2.8 cm в каждом случае. Опорные системы координат зубчатых колес расположены с источниками в центрах зубчатых колес и z осями, совмещенными с осями вращения зубчатых колес, так что они обращены в сторону от валов зубчатых колес. Это выравнивание согласуется с Revolute Joint блоками, которые допускают поворот только вокруг оси z.
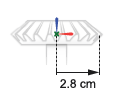
Оси вращения шестерни встречаются под прямым углом. Система координат конического зубчатого колеса A находится со смещением [2.8, 0, 0] cm, в Декартовых координатах, относительно мировой системы координат. Система координат конической передачи B находится со смещением [0, 0, 2.8] cm относительно лабораторной системы координат и под углом 90 deg о y -оси также мировой системы координат.
Завершите модель конического зубчатого колеса, задав твердые преобразования, описанные в схеме узла зубчатого колеса. Следующая концептуальная анимация показывает инкрементальные эффекты, которые твердые преобразования имели бы, если бы они применялись последовательно во время обновления модели.
![]()
Если вы еще не сделали этого, откройте неполную модель конической передачи, введя имя модели, smdoc_bevel_gear_start в MATLAB® командная строка.
В диалоговом окне Rigid Transform A блока задайте параметры Translation, показанные в таблице. Эти параметры устанавливают положение конического зубчатого колеса A относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Cartesian |
| Offset | [2.8, 0, 0] cm |
В диалоговом окне Rigid Transform B блока задайте параметры Translation, показанные в таблице. Эти параметры устанавливают положение конического зубчатого колеса B относительно лабораторной системы координат, как описано на схеме зубчатой передачи.
| Параметр | Настройка |
|---|---|
| Method | Cartesian |
| Offset | [0, 0, 2.8] cm |
В диалоговом окне Rigid Transform B блока задайте параметры Rotation, показанные в таблице. Эти параметры устанавливают ориентацию конической передачи B относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Standard Axis |
| Axis | +Y |
| Angle | 90 deg |
Симулируйте модель. В Mechanics Explorer откроется динамическая визуализация передачи, показанная в начале этого примера.
Чтобы увидеть полную модель конического зубчатого колеса, в командной строке MATLAB введите smdoc_bevel_gear. Simscape Multibody открывает модель конической передачи с твердыми преобразованиями, описанными в этом примере.
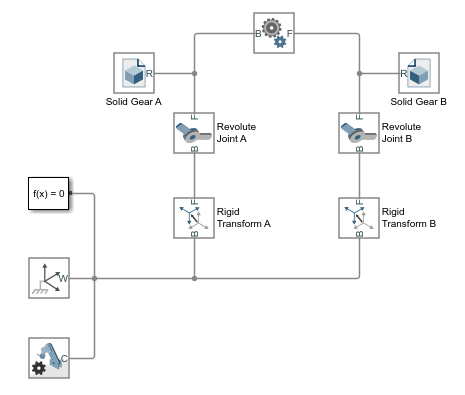
The smdoc_common_gear_external_start модель, показанная на рисунке, предоставляет пример внешнего узла цилиндрической передачи. Модель, основанная на Common Gear Constraint блоке, завершена во всех смыслах, кроме единицы - все твердые преобразования равны нулю, и системы координат передач, следовательно, совпадают в пространстве.
В этом кратком руководстве показано, как подходящие преобразования легко следуют из размерностей передачи и ограничений сборки - и как, после того как они заданы в Rigid Transform блоках, они позволяют модели передачи собираться как в mesh без ошибок.
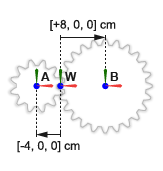
Малая цилиндрическая передача A имеет радиус тангажа 4 cm. Большая цилиндрическая шестерня B имеет радиус тангажа 8 cm. Опорные системы координат зубчатых колес расположены с источниками в центрах зубчатых колес и z осями, совмещенными с осями вращения зубчатых колес, так что они обращены в сторону от валов зубчатых колес. Это выравнивание согласуется с Revolute Joint блоком, который позволяет вращать только вокруг оси z.
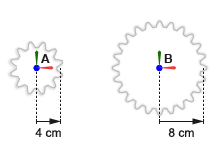
Оси вращения цилиндрической шестерни параллельны друг другу. Система координат малой цилиндрической шестерни находится со смещением [-4, 0, 0] cm, в Декартовых координатах, относительно мировой системы координат. Система координат большой цилиндрической шестерни находится со смещением [-8, 0, 0] cm, также относительно мировой системы координат.
Завершите модель внешней цилиндрической шестерни, задав твердые преобразования, описанные в схеме узла зубчатой передачи. Следующая концептуальная анимация показывает инкрементальные эффекты, которые твердые преобразования имели бы, если бы они применялись последовательно во время обновления модели.
![]()
Если вы еще не сделали этого, откройте неполную модель конической передачи, введя имя модели, smdoc_common_gear_external_start в командной строке MATLAB.
В диалоговом окне Rigid Transform A блока задайте параметры Translation, показанные в таблице. Эти параметры устанавливают положение малой цилиндрической шестерни A относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Cartesian |
| Offset | [-4, 0, 0] cm |
В диалоговом окне Rigid Transform B блока задайте параметры Translation, показанные в таблице. Эти параметры устанавливают положение большой цилиндрической шестерни B относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Cartesian |
| Offset | [8, 0, 0] cm |
Симулируйте модель. В Mechanics Explorer откроется динамическая визуализация передачи, показанная в начале этого примера.
Чтобы увидеть полную модель внешнего привода, в командной строке MATLAB введите smdoc_common_gear_external.
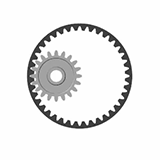
The smdoc_common_gear_internal_start модель, показанная на рисунке, предоставляет пример внутреннего узла цилиндрической шестерни. Модель, основанная на Common Gear Constraint блоке, завершена во всех смыслах, кроме единицы - все твердые преобразования равны нулю, и системы координат передач, следовательно, совпадают в пространстве.
В этом кратком руководстве показано, как подходящие преобразования легко следуют из размерностей передачи и ограничений сборки - и как, после того как они заданы в Rigid Transform блоках, они позволяют модели передачи собираться как в mesh без ошибок.
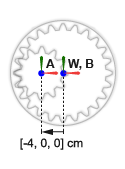
Прямозубая шестерня A имеет радиус тангажа 4 cm. Кольцевая шестерня B имеет радиус тангажа 8 cm. Опорные системы координат зубчатых колес расположены с источниками в центрах зубчатых колес и z осями, совмещенными с осями вращения зубчатых колес, так что они обращены в сторону от валов зубчатых колес. Это выравнивание согласуется с Revolute Joint блоком, который позволяет вращать только вокруг оси z.

Оси вращения шестерни параллельны друг другу. Система координат цилиндрической шестерни находится со смещением [-4, 0, 0] cm, в декартовом обозначении, относительно мировой системы координат. Система координат кольцевой передачи находится слева с источником и z осью, совпадающей с осями лабораторной системы координат .
Завершите модель внутренней цилиндрической шестерни, задав твердые преобразования, описанные в схеме узла зубчатой передачи. Следующая концептуальная анимация показывает инкрементальные эффекты, которые твердые преобразования имели бы, если бы они применялись последовательно во время обновления модели.
![]()
Если вы еще не сделали этого, откройте неполную модель конической передачи, введя имя модели, smdoc_common_gear_internal_start в командной строке MATLAB.
В диалоговом окне Rigid Transform A блока задайте параметры Translation, показанные в таблице. Эти параметры устанавливают положение цилиндрической передачи A относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Cartesian |
| Offset | [-4, 0, 0] cm |
Симулируйте модель. В Mechanics Explorer откроется динамическая визуализация передачи, показанная в начале этого примера.
Чтобы увидеть полную модель внутренней цилиндрической передачи, в командной строке MATLAB введите smdoc_common_gear_internal.
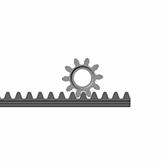
The smdoc_rack_and_pinion_start модель, показанная на рисунке, предоставляет пример блока «реечного механизма». Модель, основанная на Rack and Pinion Constraint блоке, завершена во всех смыслах, кроме единицы - все твердые преобразования равны нулю, и системы координат передач, следовательно, совпадают в пространстве.
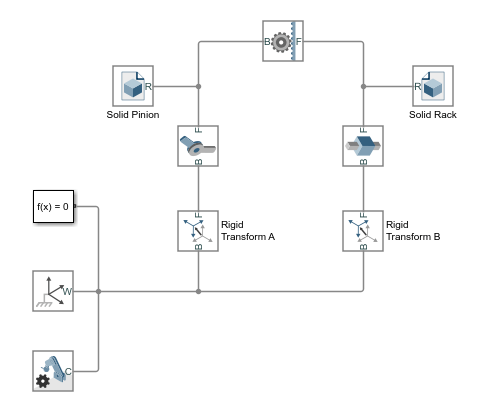
В этом кратком руководстве показано, как подходящие преобразования легко следуют из размерностей передачи и ограничений сборки - и как, после того как они заданы в Rigid Transform блоках, они позволяют модели передачи собираться как в mesh без ошибок.
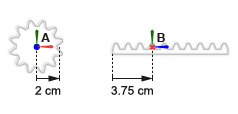
Шестерня, A, имеет радиус тангажа 2 cm. Система координат шестерни расположена с источником в центре шестерни, а z ось - вдоль оси шестерни. Система координат стойки расположена с источником 3.75 cm от ребра стойки и z оси вдоль длины стойки. Выравнивания системы координат соответствуют Revolute Joint и Prismatic Joint блокам, которые допускают движение только вокруг оси z или вдоль нее.
Ось перемещения стойки находится под прямым углом к оси вращения шестерни. Система координат шестерни находится со смещением [0, 2, 0] cm, в декартовом обозначении, относительно мировой системы координат. Система координат стойки находится под углом 90 deg относительно положительной y -оси лабораторной системы координат.
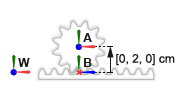
Завершите модель реечного механизма, задав твердые преобразования, описанные в схеме узла зубчатой передачи. Следующая концептуальная анимация показывает инкрементальные эффекты, которые твердые преобразования имели бы, если бы они применялись последовательно во время обновления модели.
![]()
Если вы еще не сделали этого, откройте неполную модель конической передачи, введя имя модели, smdoc_rack_and_pinion_start в командной строке MATLAB.
В диалоговом окне Rigid Transform A блока задайте параметры Translation, показанные в таблице. Эти параметры устанавливают положение шестерни A относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Cartesian |
| Offset | [0, 2, 0] cm |
В диалоговом окне Rigid Transform B блока задайте параметры Rotation, показанные в таблице. Эти параметры определяют ориентацию стойки B относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Standard Axis |
| Axis | +Y |
| Angle | 90 deg |
Симулируйте модель. В Mechanics Explorer откроется динамическая визуализация передачи, показанная в начале этого примера.
Чтобы увидеть полную модель реечного механизма, в командной строке MATLAB введите smdoc_rack_and_pinion.
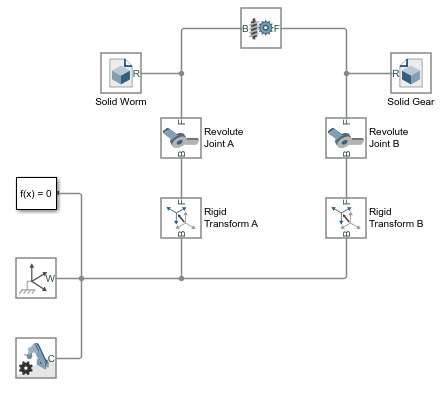
The smdoc_worm_and_gear_start модель, показанная на рисунке, предоставляет пример червячно-зубчатого узла. Модель, основанная на Worm and Gear Constraint блоке, завершена во всех смыслах, кроме единицы - все твердые преобразования равны нулю, и системы координат передач, следовательно, совпадают в пространстве.
В этом кратком руководстве показано, как подходящие преобразования легко следуют из размерностей передачи и ограничений сборки - и как, после того как они заданы в Rigid Transform блоках, они позволяют модели передачи собираться как в mesh без ошибок.
Червь, A, имеет радиус тангажа 0.85 cm. Шестерня B имеет радиус тангажа 3.75 cm. Червячная и зубчатая опорные системы координат расположены с источниками в центрах геометрии и z осями, выровненными по соответствующим осям вращения. Это выравнивание согласуется с Revolute Joint блоком, который позволяет вращать только вокруг оси z.
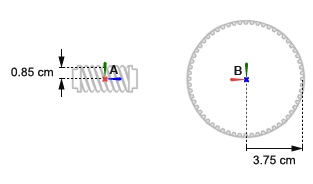
Ось вращения червяка находится под прямым углом к оси вращения зубчатой передачи. Червячная система координат находится со смещением [0, -0.85, 0] cm, в декартовом обозначении, относительно мировой системы координат. Система координат шестерни находится со смещением [0, +3.75, 0] cm и под углом 90 deg о положительной y -оси относительно лабораторной системы координат.
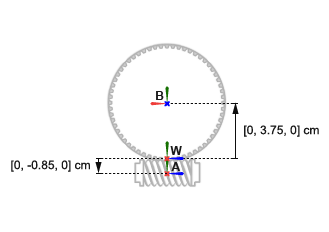
Завершите модель червячного привода, задав твердые преобразования, описанные в схеме зубчатого привода. Следующая концептуальная анимация показывает инкрементальные эффекты, которые твердые преобразования имели бы, если бы они применялись последовательно во время обновления модели.
![]()
Если вы еще не сделали этого, откройте неполную модель конической передачи, введя имя модели, smdoc_worm_and_gear_start в командной строке MATLAB.
В диалоговом окне Rigid Transform A блока задайте параметры Translation, показанные в таблице. Эти параметры устанавливают положение червячного элемента A относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Cartesian |
| Offset | [0, -0.85, 0] cm |
В диалоговом окне Rigid Transform A блока задайте параметры Translation, показанные в таблице. Эти параметры устанавливают положение передачи B относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Cartesian |
| Offset | [0, 3.75, 0] cm |
В диалоговом окне Rigid Transform B блока задайте параметры Rotation, показанные в таблице. Эти параметры устанавливают ориентацию передачи B относительно лабораторной системы координат, как описано в схеме Зубчатой Передачи.
| Параметр | Настройка |
|---|---|
| Method | Standard Axis |
| Axis | +Y |
| Angle | 90 deg |
Симулируйте модель. В Mechanics Explorer откроется динамическая визуализация передачи, показанная в начале этого примера.
Чтобы увидеть полную модель червячной передачи, в командной строке MATLAB введите smdoc_worm_and_gear.
