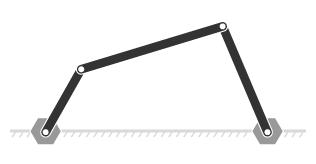
Этот пример показывает, как смоделировать четырехзвенники - замкнутую кинематическую цепь, содержащую четыре тела, которые соединяются через шарниры вращения. Одно из ссылок фиксируется на лабораторной системе координат и выступает в качестве земли. Эта ссылка заменена здесь двумя шарнирными установками, соединенными через твердое преобразование поступательного движения. Настраиваемая smdoc_compound_rigid_bodies библиотека предоставляет блоки подсистемы тела, используемые в примере.
Revolute Joint блоки позволяют вам смоделировать соединения, соединяющие соседние тела, и помогают задать их начальные состояния. Simscape™ Multibody™ программное обеспечение удовлетворяет цели совместного состояния именно в том случае, если она кинематически действительна и не конфликтует с другими целями состояния. Параметр Priority позволяет вам задать, какие цели нужно сначала попытаться удовлетворить.
Для моделирования четырехзвенника:
Запустите новую модель.
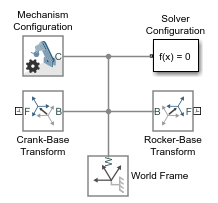
Перетащите эти блоки в модель. Твердые блоки Твердого Преобразования определяют расстояние между двумя шарнирными установками. Это расстояние является длиной неявного заземления ссылки.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape> Utilities | Solver Configuration | 1 |
| Simscape> Multibody> Utilities | Mechanism Configuration | 1 |
| Simscape> Multibody> Frames and Transforms | World Frame | 1 |
| Simscape> Multibody> Frames and Transforms | Rigid Transform | 2 |
Соедините и назовите блоки как показано на рисунке. Порты базовой системы координат Блоков Твердого Преобразования должны соединяться с блоком лабораторной системы координат.
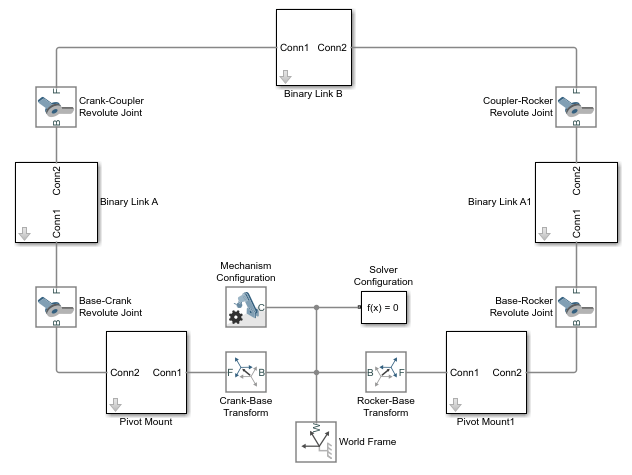
От Simscape> Multibody> Joints библиотека, тянитесь четыре Revolute Joint блоки в модель.
В MATLAB® в командной строке введите smdoc_compound_rigid_bodies. Откроется пользовательская библиотека с блоками составной подсистемы тела.
Из smdoc_compound_rigid_bodies перетащите мышью следующие блоки.
| Блок | Количество |
|---|---|
| Поворотное крепление | 2 |
| Двоичная ссылка A | 2 |
| Двоичная ссылка B | 1 |
Соедините и назовите блоки как показано на рисунке. Вы должны расположить порты системы координат пользовательских блоков подсистемы тела точно так, как показано на рисунке.
В Блок Твердого Преобразования диалоговых окнах задайте смещение между шарнирными установками и лабораторной системой координат. Шарнирные опоры приняты симметрично расположенными вокруг этой системы координат.
| Параметр | Преобразование кривошипа в основание | Преобразование базы Рокера |
|---|---|---|
| Translation> Method | Standard Axis | Standard Axis |
| Translation> Axis | -Y | +Y |
| Translation> Offset | 15 в единицах cm | 15 в единицах cm |
В каждом диалоговом окне блока двоичных ссылок задайте параметр length.
| Блок | Длина (см) |
|---|---|
| Двоичная ссылка A | 10 |
| Двоичная ссылка B | 35 |
| Двоичная ссылка A1 | 20 |
Направляющая сборка блока путем определения необходимого начального состояния для одного или нескольких соединений в модели. Чтобы задать начальный угол 30 ° для соединения База - Кривошип:
В диалоговом окне «База-Кривошипное соединение» разверните State Targets и выберите Specify Position Target.
В Value введите -30 и нажмите OK.
На вкладке Modeling нажмите Update Model.
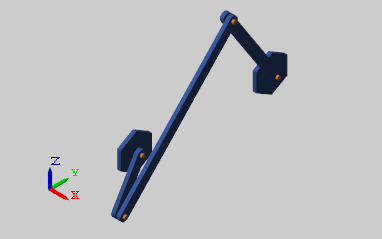
В Mechanics Explorer откроется статическое отображение четырехзвенника в его начальном строении. Если указанные положения шарниров действительны и совместимы, начальное строение точно соответствует этим целям состояний.
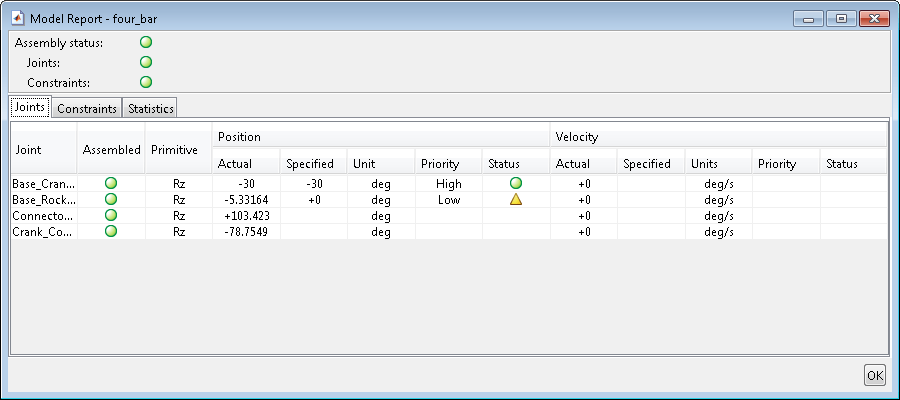
Чтобы проверить, были ли достигнуты - и как именно - цели вашего состояния, можно использовать Simscape Variable Viewer или Simscape Multibody Model Report.
Чтобы открыть Simscape Variable Viewer, в галерее Apps, нажмите Simscape Variable Viewer. Чтобы открыть Simscape Multibody Model Report, обновите схему и в панели меню Mechanics Explorer выберите Tools > Model Report.
Рисунок показывает пример отчета модели. Желтый маркер указывает, что цель состояния Base-Rocker Revolute Joint была удовлетворена приблизительно только. Оставшийся зеленый маркер указывает, что оставшаяся цель состояния была точно удовлетворена.
Запустите симуляцию. Mechanics Explorer показывает 3-D анимацию сборки четырехзвенников. Сборка перемещается из-за силы тяжести, заданной в блоке Mechanism Configuration.
Чтобы увидеть полную модель сборки с четырехзвенниками, в командной строке MATLAB введите:
smdoc_four_bar
